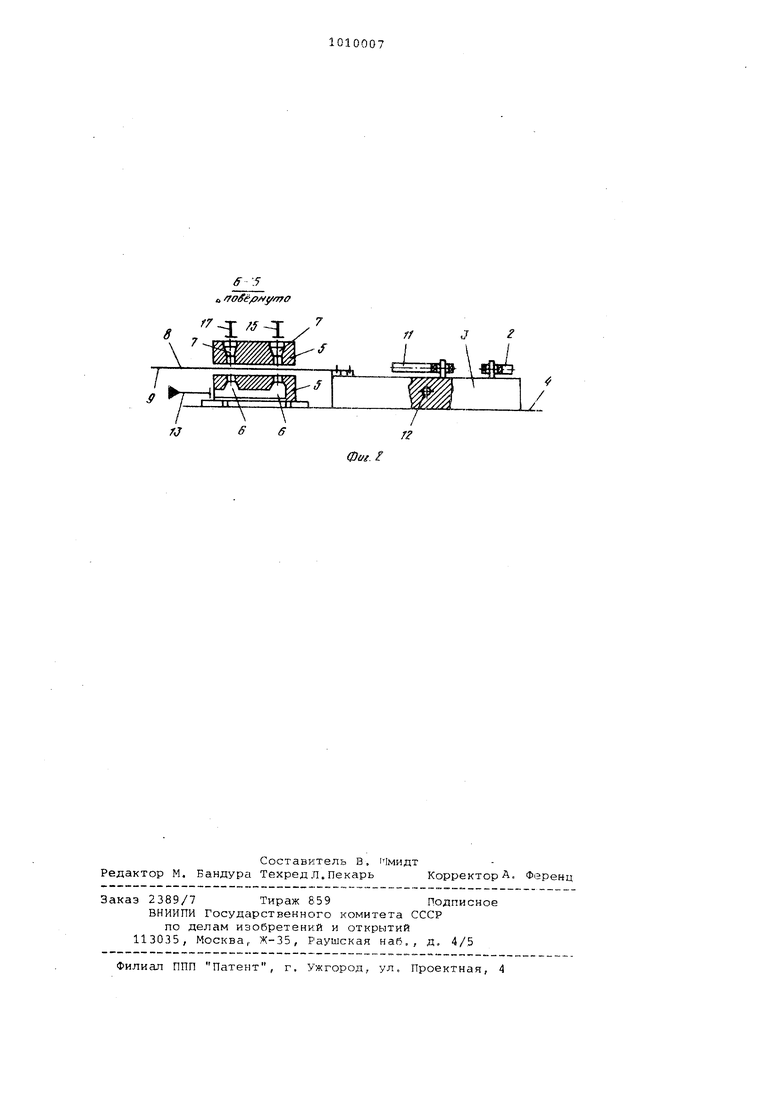
Изобретение относится к устройствам для перемещения грузов, преим щественно химического, энергетического и гидротехнического оборудования, особенно при дистанционном наведении его в рабочее положение, По основному авт, св. № 950672 известно устройство для перемеще Ния грузов, содержащее присоединенный к установленному на опорной поверхности грузу привод, смонтированный ва раме, и снабженное по крайней ме ре двумя силовыми цилиндрами, шарнирно соединенными концами штоков с грузом, а корпусами - шарнирно с рамой исопловым блоком, включающим в себя по крайней мере четыре пары сопел, каждая из которых содержит соосно размещенные на раме напорное и приемное сопла, причем приемные сопла соплового блока сообщены гидромагистралями с силовыми йилиндрами, а продольная ось симметрии каждой пары сопел расположена в вершинах геометрического прямоугольника, причем между соплами расположен экран, жестко прикрепленный к грузу и имеющий форму прямоугольной пластины, ширина которой равна расстоянию между продольными осями симметрии сопел, расположенных в углах меньшей стороны геометрического прямоугольника С.1. Недостатком известного устройств является его ограниченные функциона ные возможности. Цель изобретения - расширение функциональных возможностей. Цель достигается тем, что устрой ство для перемещения грузов, содерисащее присоединенный к установленно му на опорной поверхности грузу при вод, смонтированный на раме, и снабжен ное по крайней мере двумя силовыми цилиндрами, шарнирно ооединенными конца ми штоков с грузом, а корпусами - шар- нйрно с рамой и сопловым блоком, включающим в себя по крайней мере ч тыре пары сопел, каждая из которых содержит соосно размешенные на раме напорное-и при мное сопла, причем приемные сопла соплового блока сооб щены гидромагистралями с силозыми цилиндрами, а продольная ось симмет Сии каждой пары сопел расположена в Е.ершинах герметического прямоугольника, причем между соплами располож экран, жестко прикрепленный к грузу у. имеющий форму прямоугольной пластины, ширина которой равна расстоя:нию между продольными осями симмет рии сопел, расположенных в углах меньшей стороны геометрического пря моугольника, дополнительно снабжено с:монтированными на раме, направлякзщими угловой ориентации соплового блока. Кроме того, устройство снабжено смонтированными на грузе направляющими угловой ориентации экрана. На фиг. 1 представлено предлагаемое устройство, вид сверху; на фиг У. - разрез Б-Б на фиг. 1 (повернуто) „ Устройство для паремещени ; грузов состоит из привода 1, который присоединен тягой 2 к грузу :i, установленному на опорной раме 4 и перемещающемуся в направлении Л соплового блока 5 под углом р между направ лением А и направлением дейс1-вия привода 1, Сопловой блок 5 содержит четыре напорных сопла б и четыре приемных сопла 7. Сопла 6 и 1 направлены навсгречу друг другу и своими ;. продольнымр осями образуют геометрический прямоугольник. Устройство содержит также экран 8 с параллельными рабочими кромками 9. Экран жестко соединен с грузом 3 и имеет возможность п€;ремещаться гиежду соплами Каждая кромка 9 экрана 8 взаимодействует с двумя струями сопел б. Расстояние между кроК1ками 9 экрана 8 равно расстоянию между рядами сопел. Рабочие кромки 9 и линия, соединяющая сопла одного ряда, параллельны между собой и параллельны направлению перемещения А. Устройство содержит также силовые цилиндры 10 и 11, которые шарнирно присоединены к грузу 3 с двух сторон от центра тяжести 12 груза 3 и также закреплены на раме. Оси цилиндров 10 и 11 и линии, соединяющие шарнир соответствующего гидроцилиндра на грузе с центром тяжести, образуют углы и j :oтopыe всегда меньше 180°. Питание полостей силовых цилиндров осуществляется по магистрали 13, через напорные сопла 6, приемные сопла 7 и упрз.вляю1цие магистрали 14-17, которые соединяют приемные сопла с рабочими полостями гидроцилинцров 10 .и 11. Сопловой блок 5 установлен на направляющих 18,- предназначенных для угловой ориентации соплового блока и смонтированных на рама 4. Экран 8 установлен на направляющих 19, закрепленных неподвижно на грузе 3 и предназначенных для угловой ориентации экрана при плоскопараллельноМ перемещении груза 3. Устройство работает следую;дим образом. Сопловой блок 5 усгакавливается на направляющих так, что линия, соединяющая сопла одного ряда, iapa.nлельна требуемому нгшравлению А перемещения груза 3 и pacпoлoжe: a под углом Ъ к линии действия привода 1 , Если перег ещение груза 3 должно быть плоскопараллельным, то экран . 8 устанавливается на направляющих 19 так. что рабочие кромки 9 экрана В также параллельны требуемому направ лению А перемещения груза. Таким об разом, до начала движения груза про изводится угловая ориентация соплового блока и в случае необходимости экрана. Если требуемая траектория груза 3 включает положения груза на кривой линии, то угловая-ориентация соплового блока 5 и экрана 8 производится несколько раз. Привод 1 через тягу 2 воздейству ет на груз 3, Под действием силы со стороны тяги 2 груз перемещается вдоль направления, совпадающего с .направлением действия силы от приво да 1, При этом экран разобщает сопл в одном ряду соплового блока 5 и от крывает проходные сечения сопел дру гого ряда, сопел соплового блока, создавая в гидроцилиндрах 10 и 11 гидравлические движущие силы, при совместном действии которых с силой от привода 1 груз 3 перемещается в направлении А, Если траектория перемещения груза не отличается от направления А, то экран 8 своими рабочими кромками 9 разобщает все приемные сопла 9 от напорных сопел б одинаково. В резуль тате давления в полостях силовых цилиндров 10 и 11 равны между собой и груз 3 со стороны гидроцилиндров не испытывает силового воздействия, если не считать сил за счет разности площсщей штоковой и порщневой полости силовых цилиндров, которые малы или могут быть исключены применением недифференциальных гидроцилиндров Отклонение фактической траектории перемещения груза от направления А приводит к смещению рабочих .кромок 9 экрана 8 от первоначального положения относительно сопел блока 5, Разобщение сопел становится неодинаковым, что приводит ,к образованию в полостях гидроцилиндров 10 и 11 перепадов давления, которые создают в гидродилиндрах силы и (или) момент сил, воздействующие на груз так, что ликвидируют отклонения груза от требуемого направления. Например, груз 3 отклонился вверх от направления А под действием силы привода 1, тогда в бесштоковой полости цилиндра 11 давление возрастает, а в штоковой - уменьшается, в штоковой полости цилиндра 10 давление возрастает, в бесштоковой полости цилиндра 10 - уменьшается. Сила от гидроцилиндров направлена вправо. Результирующее движение возможно только в направлении А вправо вверх, Aвтo :aтичecки появляется сила в обоих гидроцилиндрах, которая обеспечивает результирующее движение в направлении А. Если сила от привода 1 направлена вниз, то в гидроцилиндрах возникают силы, направленные влево, и результирующее движение груза 3 происходит в направлении А влево вниз, Если под действием сил сопротивления происходит разворот груза, то экран 8 рабочими кромками 9 разобщает пары сопел так, что в гидроцилиндрах 10 и 11 возникает момент сил такого направления, что разворот (угловое отклонение) ликвидируется. Для останова груза 3 достаточно выключить привод 1, Для оперативного изменения направления движения достаточно изменить угловую ориентацию соплового блока 5 по направляющим 18 и при необходимости - экрана 8 по направляющим 19., Все возможные положения, в которые может быть перемещен груз устройством, изображенным на фиг, 1 и 2, находятся в пределах секторов, кото-. рым соответствуют углы 0° р 90 влево вниз и вправо вверх от центра тяжести груза. Перемещение груза с автоматической ликвидацией отклонеНИИ при (Ъ 90° устройством, изображенным на фиг, 1 и 2, не обеспечивается - необходимо развернуть привод 1 на 90°, В диапазоне углов 90° р 180° .устройство работает также при О ° |Ъ 90°, Поскольку полная восстанавливающая сила и момент возникают при отклонении, равном приблизительно 0,5 диаметра сопла, тс точность перемещения по каждому направлению А может быть достигнута весьма высокая, поскольку сопла могут бьггь выбраны как угодно мгшыми, если иметь в виду возможност. усиления сигнала от сопел в промежуточном усилителе. Таким образом, предложенное устройство позволяет существенно расирить функциональные возможности за счет обеспечения возможности перемещения груза в различных направениях, в том числе по криволинейным траекториям, причем с изменёни-. ем угловой ориентации груза или плоскопараллельного его перемещения.
и frogep yfr o .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения грузов | 1982 |
|
SU1074814A2 |
| Устройство для перемещения грузов | 1980 |
|
SU950672A1 |
| Устройство для измерения перемещений | 1978 |
|
SU734503A1 |
| Пневмопривод | 1980 |
|
SU945504A1 |
| УСТАНОВКА ГИДРОКАВИТАЦИОННОГО РАССНАРЯЖЕНИЯ БОЕПРИПАСОВ | 2008 |
|
RU2362967C1 |
| Управляющее устройство плоского поворотного золотника | 1981 |
|
SU985474A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2004 |
|
RU2261823C1 |
| УСТРОЙСТВО ДЛЯ ВОДОСТРУЙНОЙ ОБРАБОТКИ ТОПОЧНЫХ ЭКРАНОВ ЭНЕРГЕТИЧЕСКИХ КОТЛОВ | 2003 |
|
RU2267073C2 |
| ВОДОЗАБОРНОЕ УСТРОЙСТВО | 2003 |
|
RU2242871C1 |
| Установка для мойки изделий | 1987 |
|
SU1489858A1 |
1. УСТРОЙСТЮ ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ по авт. св. 950672, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно снабжено смонтированными на раме направляющими угловой ориентации соплового блока. 2. Устройство по п. 1, отличающееся тем, что оно снабжено смонтированными на грузе направляющими угловой ориентации экрана.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 2906298/29-11, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
