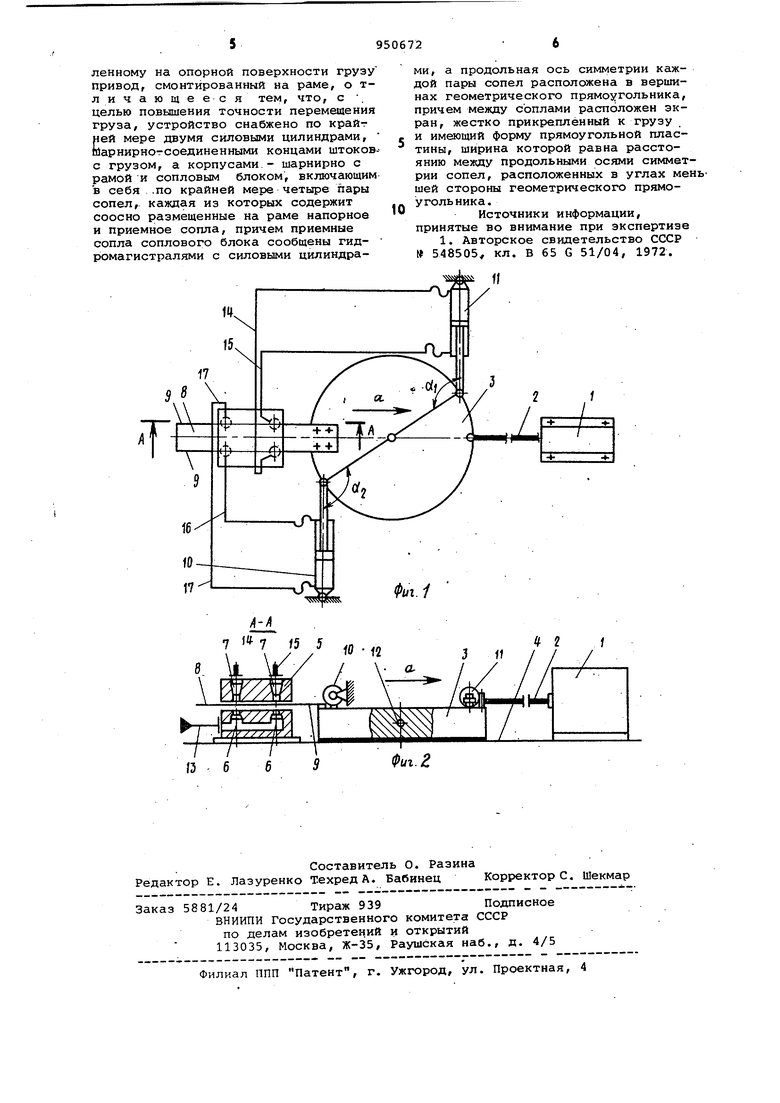
ных сопла 6 и четыре приемных сопла Сопла б н 7 на11равле 1ы навстречу дру другу, и своими продольными осями об разуют геометрический прямоух ольник. Устройство содержит также экран 8 с параллельными рабочими кромками 9 Экран жестко соединен с грузом 3 и имеет возможность перемещаться меж ду соплами. Каждая кромка 9 экрана 8взаимодействует с двумя струями сопел 6. Расстояние между кромками 9 экра на равно расстоянию между рядами сопел Рабочие кромки 9 и линия, соединяющая сопла одного ряда, параллельны между собой и параллельны направлению перемещения СЯ . Устройство содер жит также силовые цилиндры 10 и 11, которые шарнирно присоединены к грузу 3 с двух сторон от центра тяжести 12 груза 3 и также закреплены на раме. Оси цилиндров 10 и 11 и линии соединяющие шарнир соответствующего гидроцилиндра на грузе с центром тяжести, , образуют углы о и oijLf которые всегда меньше 180°. Питание полостей силовых цилиндров осуществляется по магистрали 13, через напорные сопла б, приемные сопла 7 и управляющие магистрали 14-17, которые соединяют Приемные сопла с рабочими полостями гидроцилиндров 10 и 11. Устройство работает следующим образом. Привод 1 через тягу 2 воздействует на груз 3. Под действием силы со стороны тяги 2 груз перемещается вдоль направления О совпадающего с направлением действия i силы от приво да 1. Если траектория перемещения груза не отличается от направления О то экран 8 своими рабочими кромками 9ра.зобщает одинаково (в равной мере) приемные сопла 7 от напорных 6. В результате давления в полостях силовых цилиндров 10 и 11 равны между собой, и- груз со стороны гидроцилинд ров не испытывает силового воздействия Сне считая силы за счет разнос ти площадей штоковой и поршневой полости силового цилиндра, которая мала или может быть исключена применением недифференциальных гидроцилиндров). Отклонение фактической траектории перемещения груза от направления а приводит к смещению рабочих кромок 9 экрана 8 от первоначального положения относительно сопел б блока. Разобщение сопел становится неодинаковым,- что приводит в полостях гидро цилиндров к образованию перепадов давления, которые создают в гидроцилиндрах силы, воздействующие на груз так, что ликвидируют отклонения груза от тре емого направления. Например, груз отклонился вверх от направления О, тогда в бесытокоВОЙ полости цилиндра 11 давление . возрастает, а в штоковой уменьшается. Результирующая сила направлена вниз в противоположную отклонению сторону. В гидроцилиндре 10 результирующая .сила также направлена вниз, в противоположную происшедшему смещению cTtrрону, поскольку в бесштоковой полости гидроцилиндра давление уменьшается, а в штоковой - возрастает, т.е. автоматически появляется сила в обоих гидроцилиндрах, которая ликвидирует отклонение. Аналогично действуют гидроцилиндры, если отклонение от направления d произойдет вниз. Гидроцилиндры создадут восстанавливающий момент, когда рабочие кромки 9 экрана 8 развернутся относительно сопел 7. Таким образом, отличительные признаки обеспечивают ликвидацию отклонения перемещения груза ®т требуемого направления по мере его возникновения. Восстанавливающая сила определяется параметрами гидроцилиндров, а допустимое смещение - параметрами сопел и экрана. Выбирая параметры сопел, экрана и гидроцилиндров, можно добиться весьма малых отклонений перемещения груза от требуемого направления. Поскольку полная восстанавливающая сила в гидроцилиндрах возникает при отклонении, равном приблизительно 0,5 диаметра сопла, то точность перемещения может быть достигнута весьма высокая. Так, например, для груза диаметром 4 м диаметры напорных сопел составляли 3 мм. Следовательно, отклонение.груза от требуемого направления перемещения в хвостовой его части составляет не более 1,5 мм. . С учетом размера груза для центра тяжести отклонение составляло величину 0,7 мм. Из описания, устройства видно, что величина отклонения определяется диаметром сопел, котхэрые могут бытй выбраны как угодно малыгли, особенно, если иметь в виду возможность усиления сигнала от сопел в промежуточном усилителе. Получение столь высокой точности перемещения груза вдоль заданного направления при отсутствии направля-. ющих достигается, благодаря отличиям предлагаемого устройства. Важным СВОЙСТВОМ предлагаемого устройства является также и то, что оно позволяет получать высокую точность перемещения в условиях, когда нужно оперативно изменять направление перемещения. Для этого достаточно изменить направление действия силы от привода 1, и ориентацию сопового блока и экрана. Формула изобретения Устройство для перемещения грузов, содержащее присоединенный к установ-
ленному на опорной поверхности грузу привод, смонтированный на раме, о тличающееся тем, что, с . целью повышения точности перемещения груза, устройство снабжено по крайней мере двумя силовыми цилиндрами, шарнирнотсоединенными концами штоковс грузом, а корпусами.- шарнирно с рамой и сопловым блоком, включающим в себя .по крайней мере четыре пары сопел, каждая из которых содержит соосно размещенные на раме напорное и приемное сопла, причем приемные сопла соплового блока сообщены гид- ромагистралями с силовыми цилиндрами, а продольная ось симметрии каждой пары сопел расположена в вершинах геометрического прямоугольника, причем между соплами расположен экран, жестко прикреплённый к грузу и имеющий форму прямоугольной пластины, ширина которой равна расстоянию между продольными осями симметрии сопел, расположенных в углах мень шей стороны геометрического прямоугольника.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 548505, кл. В 65 G 51/04, 1972.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения грузов | 1981 |
|
SU1010007A2 |
| Устройство для перемещения грузов | 1982 |
|
SU1074814A2 |
| Пневмопривод | 1980 |
|
SU945504A1 |
| Следящее устройство к абразивноотрезному станку | 1976 |
|
SU686856A1 |
| Устройство для измерения перемещений | 1978 |
|
SU734503A1 |
| Управляющее устройство плоского поворотного золотника | 1981 |
|
SU985474A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ В ПОЛИВНУЮ ВОДУ | 2012 |
|
RU2512179C2 |
| Вагоноопрокидыватель | 1988 |
|
SU1654197A1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| Устройство для зачистки сварных швов | 1989 |
|
SU1703402A2 |
