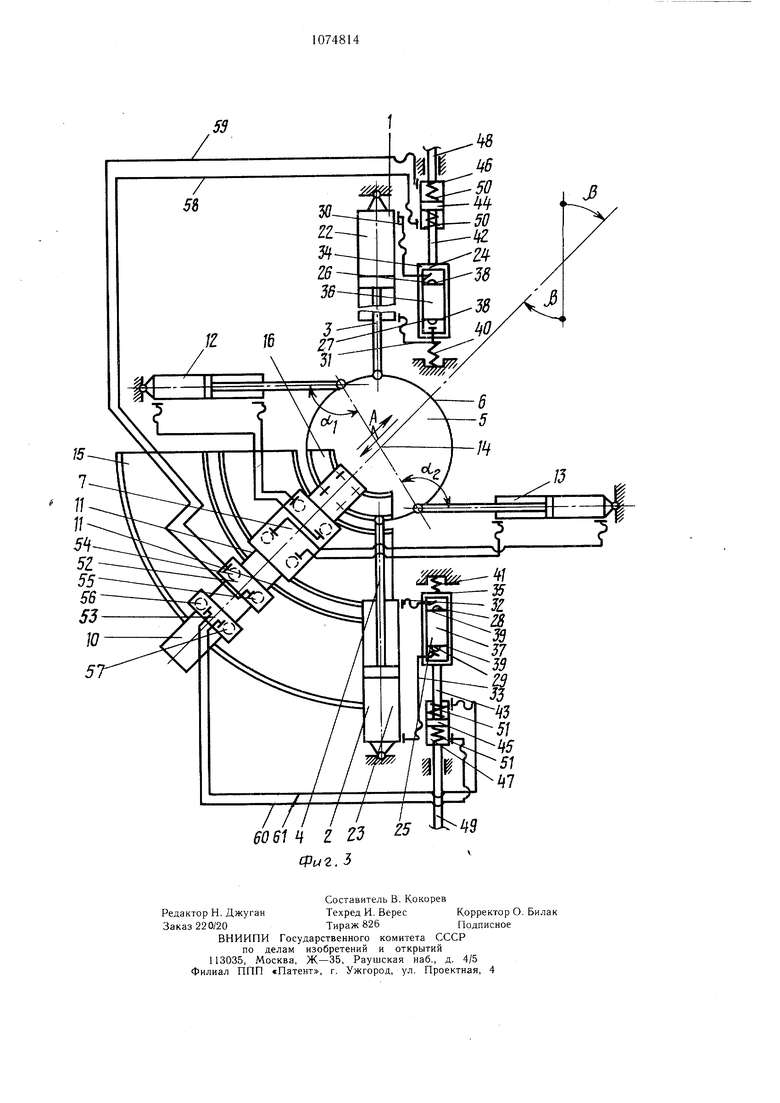
Изобретение относится к подъемно-транспортному машиностроению, в частности к устройствам для перемещения грузов. По основному авт. св. № 1010007 известно устройство для перемещения грузов, содержащее присоединенный к установленному на опорной поверхности грузу привод, смонтированный на раме, и снабженное, по крайней мере, двумя силовыми цилиндрами, щарнирно соединенными концами П1ТОКОВ с грузом, а корпусами - щарнирно с рамой и сопловым блоком, включающим в себя, по крайней мере, четыре пары сопл, каждая из которых содержит соосно размещенные на раме напорное и приемное сопла, причем приемные сопла соплового блока сообщены гидромагистралями с силовыми цилиндрами, а продольная ось симметрии каждой пары сопл расположена в верщинах геометрического прямоугольника, причем между соплами расположен экран, жестко прикрепленный к грузу и имеющий форму прямоугольной пластины, щирина которой равна расстоянию между продольными осями симметрии сопл, расположенных в углах меньщей стороны геометрического прямоугольника, снабженное смонтированными на раме направляющими угловой ориентации соплового блока и снабженное смонтированными на грузе направляющими угловой ориентации экрана 1. Недостатком известного устройства является низкая точность пере.мещения груза при несовпадении направления действия привода с требуемым направлением перемещения груза из центрального положения в ближ1 ее крайнее положение и обратно. Цель изобретения - повыщение точносги пере.мещения груза в положения, не 11а.од5ициеся на направлении действия привода, путем уменьшения отклонений груза от заданного направления. Для достижения поставленной цели устройство для перемещения грузов, содержащее присоединенный к установленному на опорной поверхности грузу привод, смонтированный на раме, и снабженное, по крайней мере, двумя силовыми цилиндрами, ujapнирно соединенными концами щтоков с грузом, а корпусами - щарнирпо с рамой и сопловым блоком, включающим в себя, по крайней мере, четыре пары сопл, каждая из которых содержит соосно размещенное на раме напорное и приемное сопла, причем прием} ые сопла соплового блока сообщены гидромагистралями с силовыми цилиндрами, а продольная ось симметрии каждой пары сопл расположена в верщинах геометрического прямоугольника, причем между соплами расположен экран, жестко при крепленный к грузу и имеющий форму прямоугольной пластины, щирина которой равна расстоянию между продольными осями симметрии сопл, расположенных в углах меньщей стороны геометрического прямоугольника, снабженное смонтированными на раме направляющими угловой ориентации соплового блока и снабженное смонтированными на грузе направляющими угловой ориентации экрана, снабжено дополнительным приводом, смонтированным на раме и взаимодействующим с грузом. Кроме того, устройство снабжено задатчиком движения груза, дополнительным сопловым блоком, установленным на нанаправляюпл.их, которые смонтированы на раме, и содержащим две пары напорных и приемных сопл, расстояние между продольными осями которых равно ширине основного экрана, механиз.мом управления приводами, размещенным на раме и содержащим две пары сопл, каждая из которых содержит соосные напорное и приемное сопла, причем последние соединены гидромагистралями с силовыми цилиндрами приводов, при этом между соплами механизма управления расположена рамка с дополнительным экрамо.м, имеющим фор.му прямоугольной пластины, щирина которой равна расстоянию между продольными осями симметрии сопл механиз.иа управления, а между рамой и рамкой с дополнительным экраном установлена пружина, при этом механизм управления приводами содержит присоединенный тягой к задатчику движения груза управляю ций цилиндр с подпружиненным с двух сторон поршнем, щток которого жестко присоединен к рамке с дополнительным экраном, при этом приемные сопла каждого дополнительного соплового блока гидромагистралями соединены с полостями своего управляющего цилиндра. На фиг. 1 схе.маткчно изображено устройство для перемещения грузов с двумя оппозитно расположенны.ми пpивoдa.v;и, на фиг. 2 - разрез Б---Б на фиг. 1; на фиг. 3 -- то же, вид сверху (устройство содержит механизм управления приводов и дополнительный сопловой блок). Устройство для перемещения грузов состоит из двух оппозитно размещенных приводов 1 и 2, которые штоками 3 и 4 присоединены к грузу 5, установленному на опорной поверхности 6 и перемеп1аю1цемуся в направлении А, основного соплового блока 7, содержащих четыре напорных сопла 8 и четыре приемных сопла 9. Сопла 8 и 9 направлены навстречу друг к другу и их продольные оси в плане образуют геометрический прямоугольник. Устройство содержит также основной экран 10 с рабочими кромками 11. Основной экран 10 соединен с грузом 5 и имеет возможность перемещаться между соплами. Каждая кромка 11 основного экрана 10 взаимодействует с двумя струями сопл 8. Расстояние между кромками 11 основного экрана равно расстоянию между рядами сопл. Рабочие кромки 1 1 и линия, соединяющая сопла одного
ряда, параллельны между собой и параллельны направлению перемещения А.
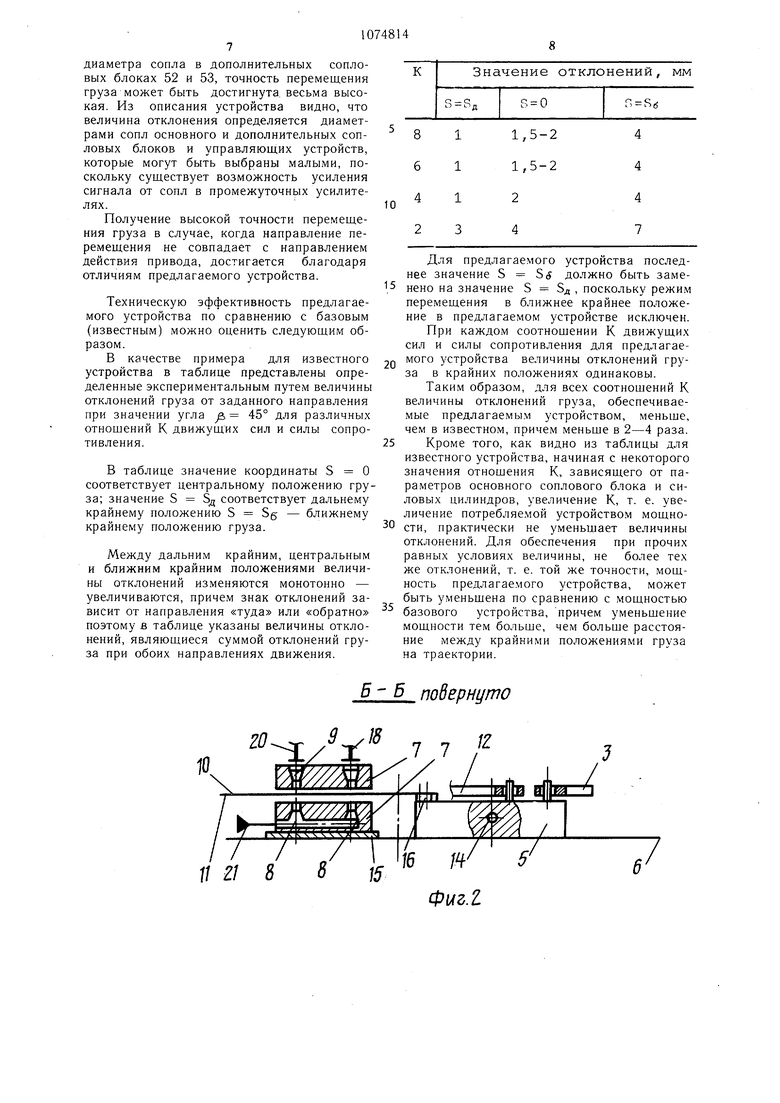
Устройство содержит силовые цилиндры 12 и 13, которые шарнирно присоединены к грузу 5 с двух сторон от центра тяжести 14 груза 5. Оси цилиндров 12 и 13 и линии, соединяющие шарнир соответствующего цилиндра на грузе, с центром тяжести 14 образуют углы ог, а, которые всегда меньще 180°С. Основной сопловой блок 7 установлен на направляющих 15, смонтированных на раме. Основной экран 10 установлен на направляющих 16, смонтированных на грузе 5. Питание полостей силовых цилиндров 12 и 13 осуществляется по магистралям 17-20, соединяющим приемные сопла 9 с рабочими полостями цилиндров. В приемные сопла 9 рабочая жидкость попадает из соосных напорных сопл 8, к которым она подводится по магистрали 2 (фиг. 2).
Онпозитно размещенные приводы 1 и 2 (фиг. 3) содержат силовые цилиндры 22 и 23, которые щарнирно соединены концами штоков 3 и 4 с грузом 5. Механизмы управления 24 и 25 силовых цилиндров 22 и 23 включают по две пары сопл 26-29, каждая из которых содержит соосные напорные и приемные сопла. Приемные сопла пар 26 и 27 соединены магистралями 30 и 31 с полостями цилиндра 22. Приемные сопла пар 28 и 29 магистралями 32 и 33 соединены с полостями цилиндра 23. Между соплами управляющих устройств размещены рамки 34 и 35 с дополнительными экранами 36 и 37 Расстояние между параллельными рабочими кромками 38 дополнительного экрана 36 равно расстоянию между продольными осями симметрии пар сопл 26 и 27.Расстояние между кро.мками 39 экрана 37 равно расстоянию между такими же осями пар сопел 28 и 29.
Между рамой и рамками 34 и 35 установлены пружины 40 и 41. Рамки 34 и 35 штоками 42 и 43 присоединены к поршням 44 и 45 управляющих цилиндров 46 и 47, корпусы которых жестко связаны тягами 48 и 49 с задатчками движения груза. Порщни 44 и 45 в полостях управляющих цилиндров 46 и 47 с двух сторон опираются на пружины 50 и 51, препятствующие самопроизвольному перемещению поршней в управляющих цилиндрах. Устройство содержит дополнительные сопловые блоки 52 и 53, установленные на направляющих 15, смонтированных на раме. Каждый дополнительный сопловой блок 52 и 53 содержит по две пары сопл 54-57, каждая из которых включает направленные навстречу друг другу соосные напорные и приемное сопла. Расстояние между продольными осями пар сопл в дополнительном сопловом блоке равно расстоянию между кромками 11 основного экрана 10, т. е. его щирине. Приемные сопла пар сопл 54-57 дополнительных сопловых
блоков 52 и 53 магистралями 58-6 соединены с полостями управляющих цилиндров 46 и 47. Питание полостей силовых цилиндров 22 и 23 осуществляется по магистраля.м 30-33 от приемных сопл на) сопл 26-29, к напорным соплам которых подводится рабочая жидкость. Питание к полостям управляющих цилиндров 46 и 47 подводится по магистралям 58-61 через дополнительные сопловые блоки 52 и 53.
0
При подводе питания каждая из кромок 38 и 39 дополнительных экранов 36 и 37 взаимодействует со струей, истекающе) из напорного сопла в приемное сопло пар сопл 26-29, а кромки II основного экрана 10 взаимодействуют со струями рабочей жид5кости в парах сопл 54-57 дополнительных сопловых блоков 52 и 53.
Устройство работает следующим образом.
Перед началом перемещения груза основной силовой блок 7 и допо.тнительный сопловые блоки 52 и 53 по направляющим
0 15, а основной экран 10 - по направляющим 16 перемещаются на угол уЗ между требуемым направление.(1 пере.мещения груза 5 и лининей действия привода, которая в начальный момент параллельна одной из ко5ординатных осей неподвижной системы координат. При перемещении груза из центрального положения (фиг. 1), например, влево вниз и обратно дальнее крайнее положение соответствует неподвижной точке крепления на раме привода 1. Оператором или от
0 задатчика движения вк.тючается привод 1, который, воздействуя на груз 5 через шток 3, перемещает груз.
Под действием силы со стороны щтока 3 груз перемещается вдоль направления действия этой силы. В центральном положе5нии груза основной экран 10 своими рабочими кромками 11 одинаково перекрывает проходные сечения напорных 8 и приемных 9 сопл. При этом, давления в полостях силовых цилиндров 12 и 13 равны между со0бой и груз 5 со стороны цилиндров не испытывает силового воздействия (не считая силы за счет разности площадей щтоковой и поршневой полостей цилиндра, которая мала или может быть исключена применением недифференциальных цилиндров). Под дей5ствие.м силы со стороны щтока 3 и под действием сил сопротивления со стороны опорной поверхности 6 груз отклоняется от направления А. Отклонение фактической траектории перемещения груза 5 от направления А приводит к смещению рабочих кромок II
0 основного экрана 10 от первоначального положения относительно сопл основного соплового блока 7. Перекрытие проходных сечений сопл становится неодинаковым, что приводит к образованию перепадов давле5ния в полостях гидроцилиндров и возникновению в цилиндрах сил, воздействующих на груз, так, что они ликвидируют отклонение груза от требуемого направления.
Например, -груз отклоняется влево от направления А, тогда в безштоковой полости цилиндра 12 давление возрастает, а в штоковой - уменьшается. Сила со стороны цилиндра направлена вправо - в противоположную отклонению сторону. В цилиндре 13 сила также направлена вправо, поскЬльку в безштоковой полости цилиндра давление уменьшается, а в штоковой возрастает. Т. е. автоматически появляется сила в обоих гидроцилиндрах, которая ликвидирует отклонение.
Аналогично будут действовать гидроцилиндры, если отклонение от направления А произойдет вправо. Гидроцилиндры создадут восстанавливаюший момент если рабочие кромки 11 основного экрана 10 развернутся относительно сопл основного соплового блока 7. Суммарное движение груза 5 под действием сил и моментов со стороны привода 1 и силовых цилиндров 12 и 13 происходит вдоль направления А. При движении груза 5 из центрального положения влево вниз и обратно (фиг. 1) при работе привода 1, для которого крайнее положение влево внизу является дальним, проекции на ось X всех движуших сил - привода и цилиндров имеют одинаковое направление, совпадающее с направлением движения груза по этой координате х, и противоположное направлению силы сопротивления. Поэтому отклонения груза от заданного направления малы и точность перемешения высокая.
Одновременно снижается потребляемая мощность силовых цилиндров, поскольку устранена необходимость преодолевать составляющую силы привода, противодействующую движению груза. При перемещении груза 5 из центрального положения в направлении А вправо вверх (фиг. 1) крайнее положение является дальним по отношению к неподвижной точке крепления привода 2. Поэтому для перемещения груза из центрального положения вправо вверх и обратно в центральном положении груза привод 1 выключается, а включается привод 2, совместная работа которого с цилиндрами 12 и 13 аналогична работе привода 1 теми же цилиндрами. При этом сохраняется та же точность перемещения груза изза уменьшения отклонений при работе привода 2, по отнощению к которому рассматриваемое крайнее положение является дальним. Таким образом, величина максимальных отклонений груза от заданного направления вдоль всей траектории перемещения груза уменьщается из-за перемещения груза только в дальние крайние положения и обратно, но последовательно двумя оппозитно установленными приводами.
При перемещении груза вдоль направления А приводом 1 или 2 совместно с силовыми цилиндрами 12 и 13 величина силового воздействия привода на груз и, следовательно, величина отклонений груза зависят от острого угла между линией действия штока 3 или 4 и направлением перемещения. Устройство для перемещения грузов, в котором отклонения груза из-за действия привода ограничены по величине и одинаковы по всей траектории, изображено на фиг. 3. Предположим, груз 5 необходимо переместить из центрального положения (фиг. 3) влево вниз. Тогда включается
привод 1, который работает следующим образом. В исходном положении рабочие кромки 38 дополнительного экрана одинаково перекрывают проходное сечение пар сопл 26 и 27 и перепад давления в полостях силового цилиндра 22 отсутствует. Задатчиком движения или оператором привод перемещается относительно рамы тяги 48 с управляюш.им цилиндром 46, штоком 42, рамкой 34 и дополнительным экраном 36, например, вниз (фиг. 3). При этом пружи0 на 40, жесткость которой значительно меньше жесткости пружин 50, сжимается, рабочими кромками 38 экрана 36 открывается проходное сечение пары сопл 26 и закрывается проходное сечение пары сопл 27. Через приемное сопло пары 26 и по магист рали 30 рабочая жидкость поступает в бесштоковоую полость силового цилиндра 22 и поршень силового цилиндра вместе со штоком 3, грузом 5 и основны.м экраном 10 смещается вниз.
Рабочие кромки 11 открывают проходные сечения соответствующих сопл соплового блока так, что в цилиндрах 12 и 13 появляется сила, направленная влево, и суммарное движение груза происходит вдоль направления А. Рабочие кромки 11 откры5 вают также проходное сечение пары сопл 54 дополнительного соплового блока 52. Через приемное сопло этой пары и по магистрали 58 рабочая полость поступает в штоковую полость управляющего цилиндра 46. Преодолевая действие пружины 50 поршень 44
0 со штоком 42 рамкой 34 и дополнительным экраном 36 смещается вверх, возвращая рабочие кромки 38 экрана 36 в исходное положение и уменьшая силу со стороны цилиндра 22, приложенную к грузу 5. Таким образом, величина отклонений груза от заданного направления, не совпадающего с линией действия привода, не превышает величины диаметра сопла в паре сопл дополнительного соплового блока 52.
0Аналогично работает привод 1 устройства при смещении тяги 48 вверх. Для перемещения груза 5 из центрального положения вправо вверх включается привод 2, действие которого TaKOi,- же, как и привода 1. Поскольку полная движущая сила в ци5 линдрах 22 и 23 возникает при открытии проходных сечений пар сопл механизмов управления 24 и 25, а уменьшается при отклонении, равном приблизительно половине
диаметра сопла в дополнительных сопловых блоках 52 и 53, точность перемещения груза может быть достигнута, весьма высокая. Из описания устройства видно, что величина отклонения определяется диаметрами сопл основного и дополнительных сопловых блоков и управляющих устройств, которые могут быть выбраны малыми, поскольку существует возможность усиления сигнала от сопл в промежуточных усилителях.
Получение высокой точности перемещения груза в случае, когда направление перемещения не совпадает с направлением действия привода, достигается благодаря отличиям предлагаемого устройства.
Техническую эффективность предлагаемого устройства по сравнению с базовым (известным) можно оценить следующим образом.
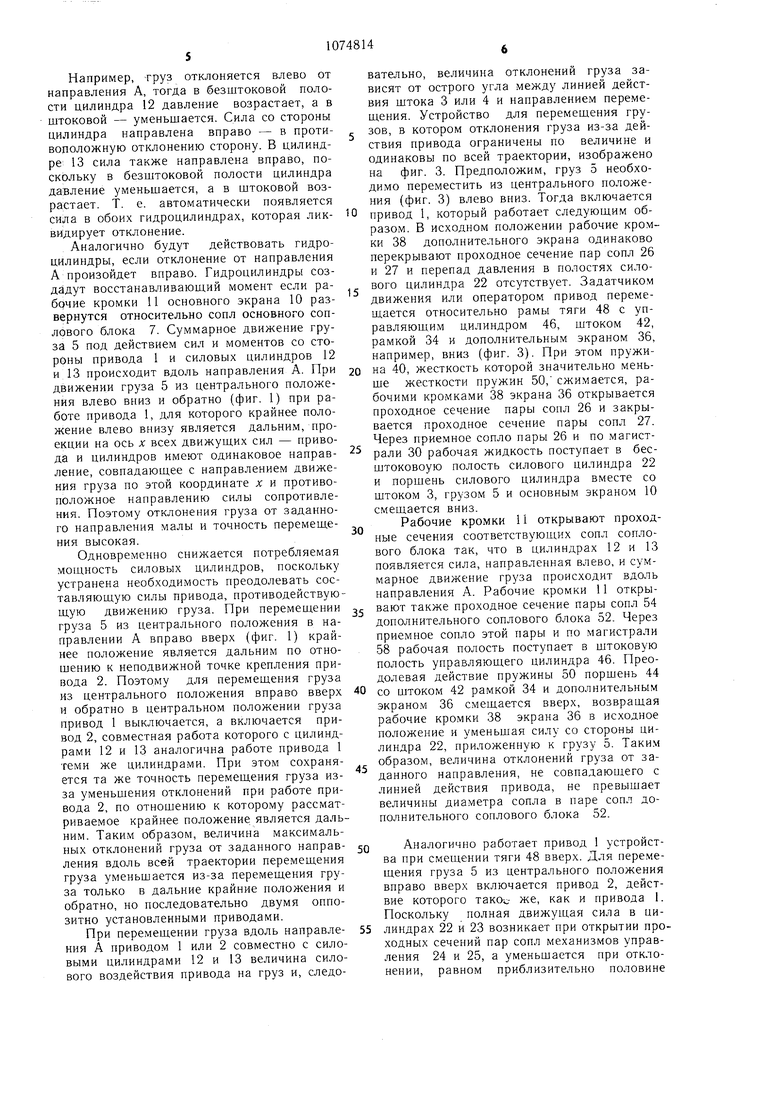
В качестве примера для известного устройства в таблице представлены определенные экспериментальным путем величины отклонений груза от заданного направления при значении угла 45° для различных отношений К движущих сил и силы сопротивления.
В таблице значение координаты соответствует центральному положению груза; значение S 5д соответствует дальнему крайнему положению S Sg - ближнему крайнему положению груза.
Между дальним крайним, центральным и ближним крайним положениями величины отклонений изменяются монотонно - увеличиваются, причем знак отклонений зависит от направления «туда или «обратно поэтому в таблице указаны величины отклонений, являющиеся суммой отклонений груза при обоих направлениях движения.
Для предлагаемого устройства последнее значение S S(f должно быть заме5 нено на значение S 8д , поскольку режим перемещения в ближнее крайнее положение в предлагаемом устройстве исключен.
При каждом соотношении К движущих сил и силы сопротивления для предлагаемого устройства величины отклонений груза в крайних положениях одинаковы.
Таким образом, для всех соотношений К величины отклонений груза, обеспечиваемые предлагаемым устройством, меньше, чем в известном, причем меньше в 2-4 раза.
Кроме того, как видно из таблицы для известного устройства, начиная с некоторого значения отношения К, зависящего от параметров основного соплового блока и силовых цилиндров, увеличение К, т. е. увеличение потребляемой устройством мощности, практически не уменьшает величины отклонений. Для обеспечения при прочих равных условиях величины, не более тех же отклонений, т. е. той же точности, мощность предлагаемого устройства, может быть уменьшена по сравнению с мощностью базового устройства, причем уменьшение мощности тем больше, чем больше расстояние между крайними положениями груза на траектории.
5 Б повернуто
ф{лг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения грузов | 1981 |
|
SU1010007A2 |
| Устройство для перемещения грузов | 1980 |
|
SU950672A1 |
| Пневмопривод | 1980 |
|
SU945504A1 |
| Устройство для измерения перемещений | 1978 |
|
SU734503A1 |
| АЭРОЛЕТ (ВАРИАНТЫ), ЧАСТИ АЭРОЛЕТА, СПОСОБЫ ИСПОЛЬЗОВАНИЯ АЭРОЛЕТА И ЕГО ЧАСТЕЙ | 2010 |
|
RU2466061C2 |
| Полноприводной трактор | 1987 |
|
SU1437251A1 |
| УСТРОЙСТВО ДЛЯ ГИДРОКАВИТАЦИОННОЙ ОЧИСТКИ ПОВЕРХНОСТЕЙ ПОД ВОДОЙ | 2013 |
|
RU2522793C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ В ПОЛИВНУЮ ВОДУ | 2012 |
|
RU2512179C2 |
| Способ обработки длинномерного проката и автоматический комплекс для его осуществления | 1987 |
|
SU1625557A1 |
| Устройство для подъема и перемещения груза | 1977 |
|
SU707887A1 |
1. УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, по авт. с. № 1010007, отличающееся тем, что, с целью повышения точности перемещения груза в положения, не находящиеся на направлении действия привода, путем уменьшения отклонений груза от заданного направления, оно снабжено дополнительным приводом, смонтированным на раме и взаимодействующим с грузом. 2. Устройство по п. 1, отличающееся тем, что оно снабжено задатчиком движения груза, дополнительным сопловым блоком, установленным на направляющих, которые смонтированы на раме, и содержащим две пары напорных и приемных сопл, расстояние между продольными осями которых равно ширине основного экрана, механизмом управления приводами, размешенным на раме, и содержашим две пары сопл, каждая из которых содержит соосные напорное и приемное сопла, причем последние соединены гидромагистралями с силовыми цилиндрами приводов, при этом между соплами механизма управления приводами расположена рамка с дополнительным экраном, имеющим форму прямоугольной пластины, ширина которой равна расстоянию между продольными осями симметрии сопл механизма управления, а между рамой и рамкой с дополнительным экраном установлена пружина, при этом механизм управления приводами содержит присоединенный тягой к задатчику движения груза управляющий цилиндр с подпружиненным с двух сторон поршнем, шток которого жестко присоединен к рамке с дополнительным экрано.м, при этом приемные сопла каждого дополнительного соплового блока гидромагистралями соединены с полостями своего управляюшего цилиндра. Л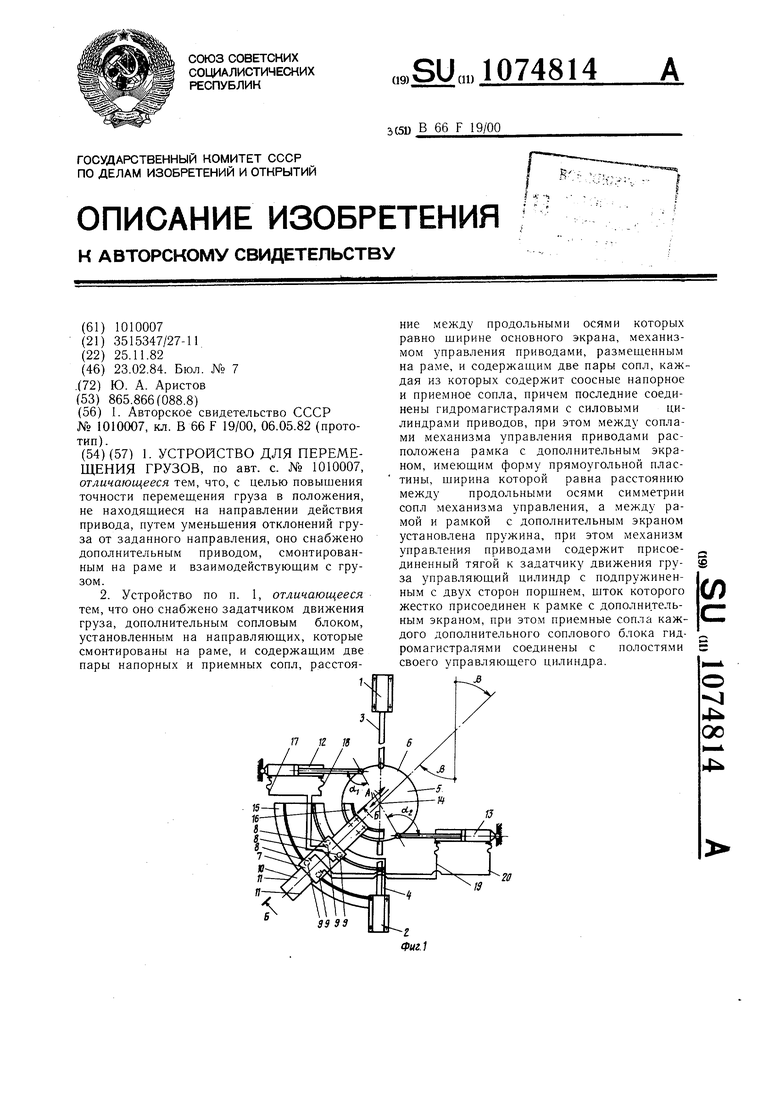
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для перемещения грузов | 1981 |
|
SU1010007A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
