Изобретение относи гея к винтовым домкратам, вертикально и горизонтально перемещающим грузы на расстояния, превыщающие максимальную длииз самого домкрата.
Онисываемый ползучнГ виггговой домкрат имеет винто-гаечную группу с реверсивным нриводом от электродвигателя, расноложенную внутри мачты, составленной из двух или четырех опорных стоек с окнами, куда заходят опорные нальцы домкрата при его перемещении и нри перемещении им груза.
Применение домкратов, движущихся внутри опорной мачты, служащей опорой для домкрата, известно (например, домкрат Озерова). При этом, однако, процесс перемещения домкрата оставался неавтоматизированным и не исключалась необходимость в подмащивании домкрата при его движении от одной группы опор к другой.
Известны также винтовые и)агающие домкраты Стуканова, которые не имеют опорных стоек или мачт и движутся за перемещаемым ими грузом при непременном условии беспрерывного подмащивания посторонних предметов под их опорные ланы.
Положительные особенности предложенного ползучего винтового домкрата заключаются в его конструкции, устраняющей недостатки существуюндих домкратов и дающий возможность автоматизировать процесс переключения механизма с подъема груза .на подъем домкрата и обратно и облегчающей обслуживание домкрата благодаря упрощению механизма по сравнению с известными.
Первой конструктивно особенностью описываемого ползучего винтового домкрата яв.шется то, что его силовой механизм выполнен в виде виито-гаечной группы с опорными коробками, снабженными реверсивным приводом, для винта и выдвижными, расположенными в коробках, опорными подпружиненными пальцами; в опорных стойках сделаны отверстия для пропуска пальцев.
Второй особенностью предложенного домкрата является то. что для автоматизации перевода сиотового механизма с подъема груза на подъем домкрата опорные подпружиненные пальцы коробки винта и коробки гайки выполнены с верхними скосами.
Третьей особенностью изобретения является применение второй группы опорных подпружиненных пальцев с 1ШЖНКМИ скосами для удерл :ания стоек при их подъеме домкратом.
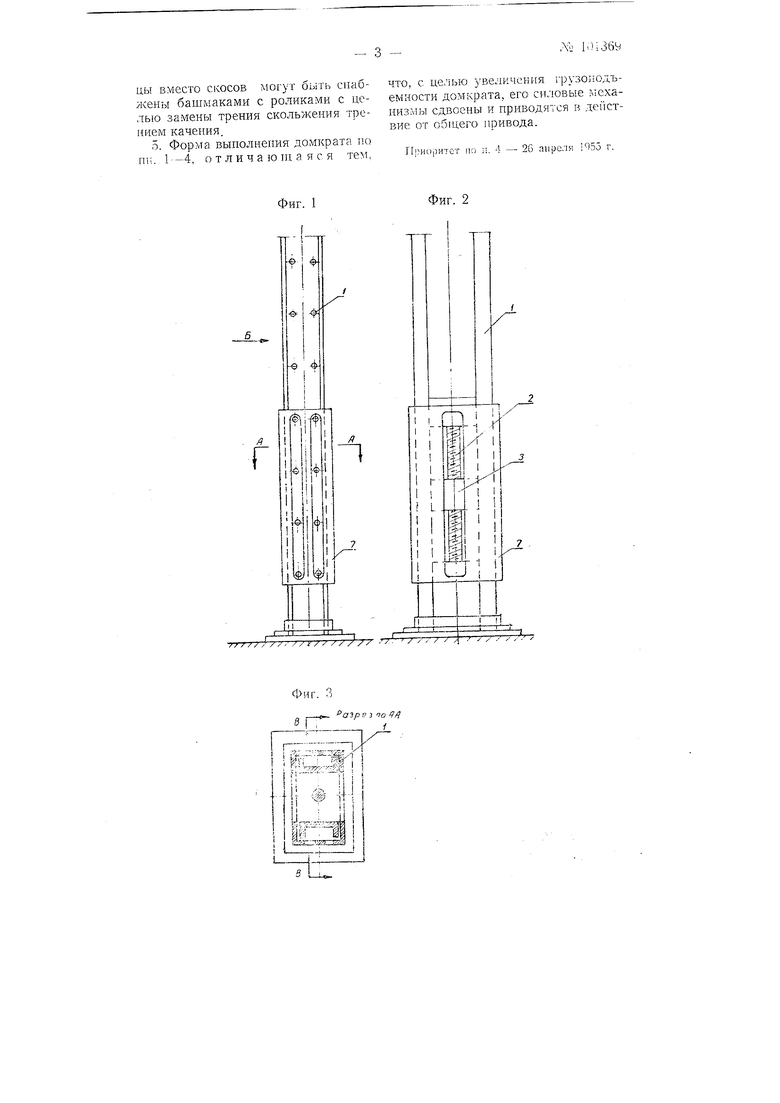
На фиг. 1 изображен домкрат, вид сбоку; на фиг. 2 - вид домкрата по стрелке Б на фиг. 1; на фиг. 3 - его разрез по А А на фиг. 1; на фиг. 4 -
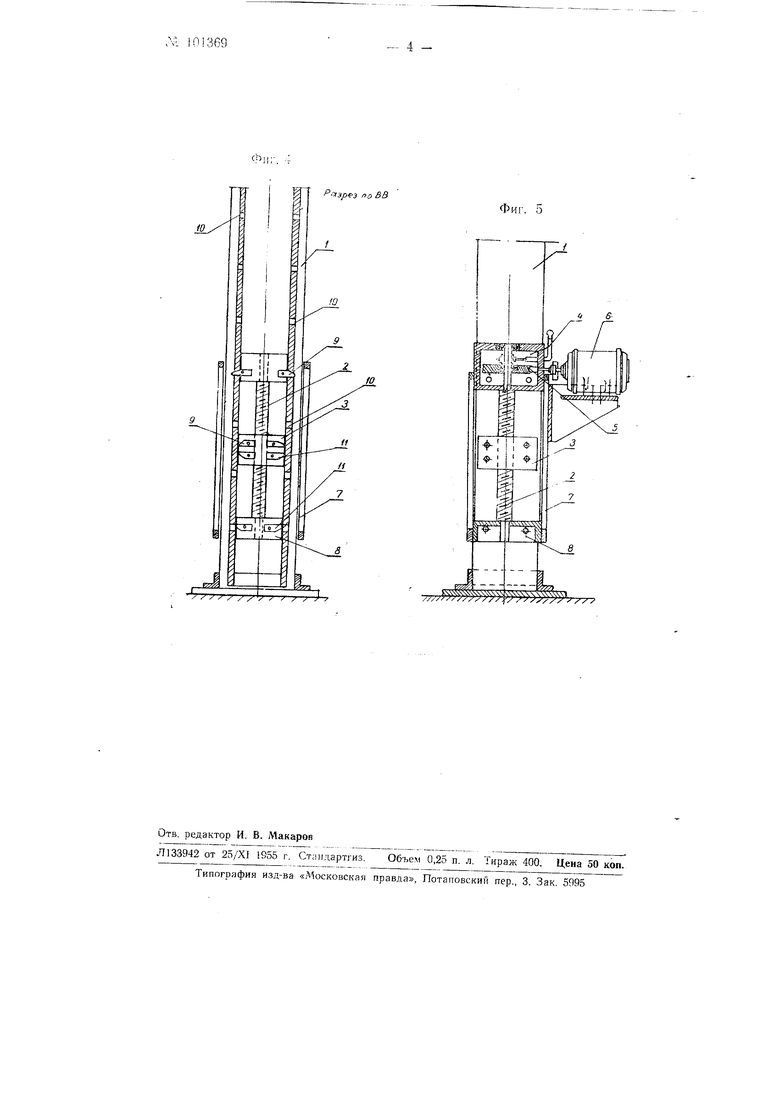
оазрез домкрата по В В на фиг. 3; на фиг. 5 - кинематическая схема привода домкрата.
опорными стойка.ми 7, которых может быть две (как показано иа черте 1 е) млк четыре, расположен силовой механизм домкрата - виито-гаечиая груипа, состоящая из винта 2, снабженного оиориыми коробками, и гайки 3. В опорной коробке 4 расположен редуктор 5 с реверсивиым ходом и переключателем для автоматизации перевода силового механизма с подъема груза иа иодъем домкрата и обратно.
Редуктор 5 получает вращение от электродвигателя 6, установленного на кожухе 7 домкрата.
Кожух домкрата жестко соединен с опорной коробкой 4 и опорной коробкой 8 винта. В гайке 3 и оиорной коробке 4 установлены иодпружииеиные пальцы 9, снабженные верхиими скосами.
При перемещении коробки 4 и гайки 3 вдоль стоек / иальцы 9 могут заходить в окиа 10 стоек. На фиг. 4 показано положеине домкрата, когда в окно 10 зашли иальцы опорной коробки 4.
В момент зяхода пальцев в окно реверсивный редуктор 5 из еняет направление враще1п- я гзиита и. если до этого неремещался вдоль стоек випт, а гайка бькча иеиодвижиой, то теперь начиет иеремещаться raiiKa, а ;5иит будет только в)ащаться. На фиг. 4 показано по.чожение, при котором иеремещается вверх гайка 3.
Когда пальць( 9 совместятся с последующилги окнами 10 и войдут в них, про 1зойдет очередное изменение наиравления враихения винта 2 и виит начнет ВИОБЬ перемеИ1аться вверх, поднимая груз.
Благодаря верхним скосам иальцы ири движении гайки 3 и коробки 4 вверх автоматически выходят из окон 10 стоек. Подпружииеииые иальцы вместо скосов могут быть сиабжены башмаками-ро.1иками с целью замены трения скольжеиия на трение качения.
Нижняя оиорн.ая коробка 8 и гайка 3 снабжены второй группой подиружинеиных пальцев //, у которых скосы сделаны СНИЗУ.
Пальцы 11 нредназначены для подъема домкратом стоек / ири наличии верхней опоры для ннх. При иеремещении стоек пальцы 9 убраны внутрь коробок, а нальцы 11 выдвинуты, и наоборот, при иеремещеиии 1руза иальцы // убраны внутрь коробок, а иальцы 9 1зыд 5инуты в рабочее иоложеиие.
Пальцы // также могут быть сиабжеиы башмаками с роликами вместо скосов.
Для увеличеиия грузоподъе и-юсти домкрата силовые механизмы домкрата могут быть сдвоены; они приводятся в движение ст обигего ири;;ода.
Г р е д м е т и з о б р с т е i ; я
1.Ползучий винтовой домкрат, силовой механизм которого расположен между двумя или четырьмя оиор1-Н11ми стойками, о т; и ч а гоид и и с я тем, что, с целью перемещеиия груза в вертикальном и горизонтальном направлениях на расстояния, превьниающне максимальную длииу самого домкрата, силовой механизм домкрата вынолнен в виде )зиито-гаечной груииы с опорными коробками, снабженными реверсивным приводом для виита и выдвижиы.чи, расположенными в коробках, оиориыми иодпружииеиными пальцами, а в огюрных стойках сделаны отверстия для пропуска этнх пальцев.
2.Форма выполнения домкрата по и. 1, отличающаяся тем, что для автоматизании иеревода силовоJX) меха1и зма с подъема груза па подъем домкрата и обратно, подиружинегшые опорные иальцы коробки винта и гайки выполнены с верхними скосами, а реверсивиый иривод винта ci-ia6 Ke - нереключателем.
3.Форма выполнения домкрата по пи. 1 и 2, от .1 и ч а ю щ а я с я тем, что для подъе 1а домкратом опорных стоек, ири иалнчии верхней оиоры для стоек, домкрат снабжен второй группой пoдпpyжинeгн ыx опорных иальцев, имеющих нижние скосы для Здержаиия стоек при их подъеме домкратом.
4.Форма вьпюлнения домкрата по пи. 1 -3, отличающаяся тем, что подиружииеиные опорные пальцы вместо скосов могут быть смабжены башмаками с роликами с целыо замены трения скольжения треиием качения. 5. Форма выполнения домкрата по ПП. 1 --4, отличаю HI а я с я тем. что, с целью увеличения грузо одъемкости домкрата, его силовые механизмы сдвоены и приводятся в де1 |ствне от общего привода. Приоритет по л. 4 - 2G апреля -ЧбЗ г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвижная опалубка | 1954 |
|
SU100590A1 |
| Способ подъема домкратами с использованием телескопических опор со штоками | 2020 |
|
RU2758726C1 |
| СИСТЕМА НЕПРЕРЫВНОГО ВОЗВЕДЕНИЯ МАССИВНЫХ ЖЕЛЕЗОБЕТОННЫХ И БЕТОННЫХ КОНСТРУКЦИЙ | 2023 |
|
RU2830689C1 |
| Реверсивно-рулевое устройство водометного движителя | 1983 |
|
SU1111945A1 |
| АГРЕГАТ РЕМОНТНО-БУРОВОЙ АР32/40 | 2007 |
|
RU2380512C2 |
| Домкрат | 1983 |
|
SU1144967A1 |
| Скользящая опалубка | 1973 |
|
SU548694A1 |
| Шагающий домкрат | 1951 |
|
SU93409A1 |
| ПОДКАТНОЙ АВТОМОБИЛЬНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2023 |
|
RU2804714C1 |
| ГРУЗОПОДЪЕМНИК | 2005 |
|
RU2380313C2 |
Фиг. 1
f-i
л.
14)
агр по q
I feBiti
itinii
Фиг. 2
тЬ 1 , л
I I
i 1
гО1 1
w f,y3/j(i no BB
Фиг. 5
/ x/XX/// X//X
