Изобретение относится к автомат ке и может быть использовано в сис темах регулирования различных техн логических параметров. Известна цифровая система регулирования скорости электропривода содержащая задатчик скорости, преобразователь частота - напряжение, блок сравнения, бэток управления и двигатель, вал которого механиЧески связан с измерителем скороетиCl.Недоста ком известной системы я ляется низкая надежность. Наиболее близким к изобретению по технической сущности является ц ровой регулятор, содержащий последовательносоединенные генератор опорной частоты, преобразователь ко частота, делитель частоты, блок сравнения, преобразователь код5 напряжение, блок управления и двигатель, вал которого механически связан с преобразователем скорость частота С 2,. . Основным недостатком известного регулятора является невысокая надежность ... Целью изобретения является повышение надежности регулятора. Указанная цель достигается тем, что в него введены счетчики импульсов, элементы И,RS-триггеры, формирователи импульсов и элемент 2И-ИЛ выход которого, соединен с вторым входом блока сравнения, а первые входы - соответственно с выходами первого и второго формирователей импульсов и R-входами первого и второго счетчиков, С-входы которых подключены к выходу преобразователя код - частота, а выходы старших разрядов через первый и второй элементы И - к :S-входам первого и вто{Ього RS-трйггеров, R-входы которы соединены с обнуляющим входом регулятора, прямые вь1ходы - соответственно с первыми входами третьего и чет.йертого элементов И и сигнальньми выходами регулятора, а инверсные выходы - с вторыми входами четвёртого и третьего элементов И, выхойами подключенных соответственно .к R-входу и S-входу третьего RS-тр гера, прямой и инверсный выходы которого Соединены с вторыми входами элемента 2И-ИЛИ, причем выходы пре образователя скорость - частота под ключены к входам соответствующих фо 1мироватеЛей импульсов. На фИГ. 1 приведена блок-схема цифрового регулятора; на фиг. 2 временные диаграммы работы регулятора. Цифровой регулятор содержит гене ратор опорной частоты 1, преобразователь код --частота 2, делитель частоты 3, блок сравнения 4, преобразователь код - напряжение 5, блок управления б, двигатель 7, преобразователь скорость - частота 8, первый 9 и второй 10 формирователи импульсов, элемент 2И-ИЛИ 11, первый 12 и второй 13 счетчики импульсов, первый 14 и второй 15 элементы И, первый 16 и второй 17 RS-триггеры третий 18 и четвертый 19 элементы И третий RS-триггер 20, сигнальные выходы 21 и 22 и обнуляющий вход 23. Регулятор работает следующим образом. . Сигнал задания вырабатывается в форме выходной частоты (буферного/ делителя 3, включенного на выходе преобразователя 2/ частота которого Пропорциональна частоте генератора 1 и коду уставки, вводимой в. преобразователь. Сигнал обратной связи вырабатывается датчиками преобразователя 8, связанногоС. исполнительным двигателем 7, обеспечив еиощими импульсные, прямоугольные сигналы на первом и втором выходах преобразователя 8.Формирователи импульсов 9 и 10 -формируют импульсы/ соответствующие переднему и заднему фрон-, там сигналов на каждом выходе преобразователя 8. Короткие импульсы -: поступают через эл.емент 2И-ИЛИ 11 на второй вход блока сравнения 4, на первый вход которого поступают импульсы частоты задания f. Блок сравнения 4, выполненный на основе реверсивного счетчика, производит интегральное сравнение частот и зарабатывает код ошибки. Точность регулирования выходного параметра в установившемся режиме определяется только стабильностью частоты генератора 1. С целью повышения надежности системы в целом в ней применено резервирование узла, находящегося в наиболее тяжелых эксплуатационных условиях,- первичного преобразователя peгyлиpye югo параметра, с возможностью автоматического переключения в цепи обратной связи с рабочего канала на резервный. Контроль исправности того или иного выхода преобразователя 8 основан на контроле скважности (коэффициента заполнения kj) следования сигналов прямоугольной формы на каждом из упомянутых выходов. При нормальной настройке датчиков преобразователя на скважность, равную двум (k 0,5)/ отклонения значений .скважности как в сторону мини- мальных, так и в сторону максимальных значений служит характерным признакбм нарушения нормальной работы преобразователя (например, самопроизвольное изменение рабочего зазора
под действием вибраций между индуктивным или емкостным чувствительным элементом и вращающимся квантователем (модулято1 ом|. В предлагаемой системе в качестве нормального ( исправного ) состояния принят режим работы преобразователя, когда коэффициент заполнения сигнала на его выходе лежит в пределах 0,,75 что соответствует изменению скважности в пределах 4.. .4/3. .Так, как в принцице, режим работы преобразователя на рраницах указанного диапазона еще, как правило, не приводит к отказу в системе регулирования, сам факт переключения рабочего канала на резервный можно рассматривать как предупреждающую меру в силу наметившейся тенденции к полному выходу- канала из строя. Последнее принципиально позволяет осуществить переключение каналов своевременно без нарушения режима регулирования.
Указанные функции реализуются следующим образом.
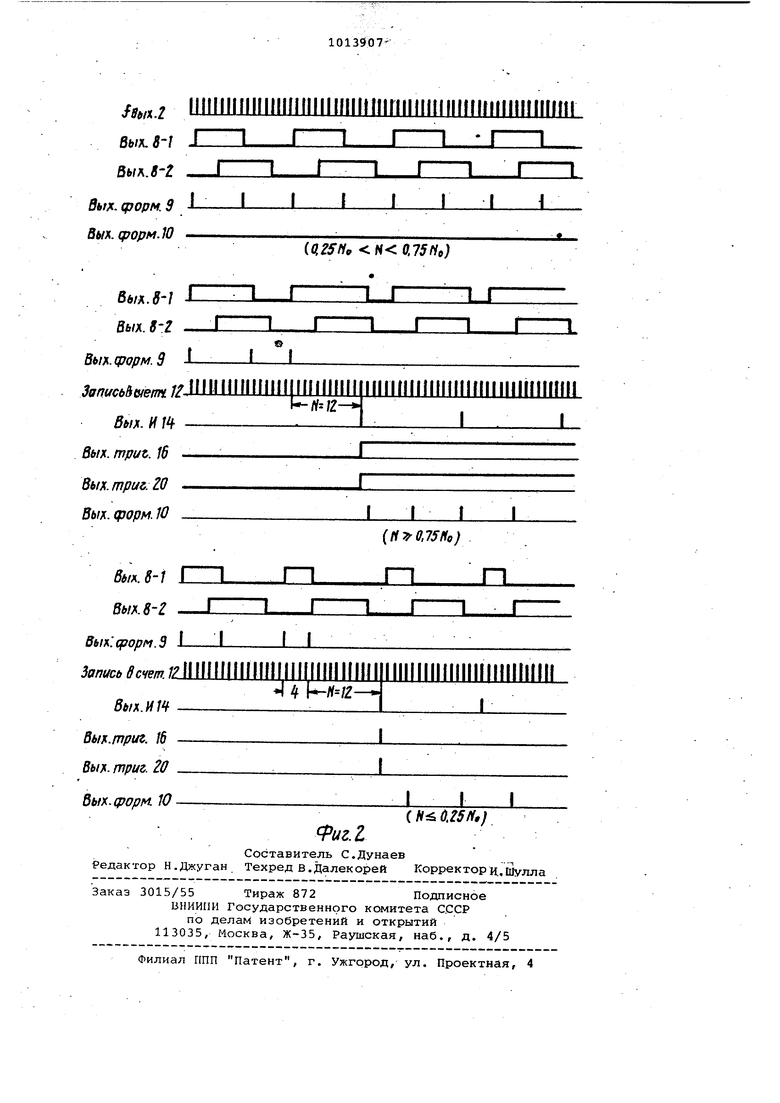
Счетчики импульсов. 12 и 13 работают в режиме циклического обнуления , которое .производится в моменты поступления на их обнуляющие входы i коротких импульсов с выходов формирователей импульсов 9 и 10. обнулениями на их счетные входы с выхода преобразователя 2 поступают импульры частоты f, kg, где kg- коэффициент деления делителя частоты 3. В установившемся режиме для цифровой системы регулирования описанного типа fi ос емкости счетчиков 12 и 13, численно равной Njj 2kg,9HCJio импульсов, которое может поступить на его счетный вход за период следования импульсов fp, а значит и за один цикл между двумя очередными обнулениями при скважйости сигнала датчика, равной двум, оказывается равным значению 0,5Njj. При изменении коэффициента заполнения сигнала датчиков от 0,25 до 0,75 заполнение счетчиков в казйдом цикле обнуления колеблется в пределах от 0,25 до 0,75 Np.,-Причем, как видно из временных диагр-амм фиг. 2, в случае как минимального, так и максимального значений; kj сигнала обратной связи, число, записываемое в соответствующий счетчик между двумя импульсалш частоты if принимает
и N,
поочередно значения Nj и piin
Элементы И 14 и 15 так
«- тохподключены к информационным.выходам
счетчиков 12 и 13, что формируют
выходной сигнал nrai поступлении в счетчик некоторого граничного числа импульсов ,. Например, при 8, и NQ 16 целесообразно выбрать rnoif 12, связать входы элементов И 14 и 15 р двумя, старшими разрядами каждого из четырехразрядных двоичных счетчиков 12 и 13. Как видно из диаграммы-фиг. 2, сигнал на , выхода: указанных элементов И формируется
0 при достижении коэффициентом запол-нения сигнала обратной связи как максимального (0,75), так и минимального (0,25 значений и может быть использован как предупредитель5ный сигнал неисправности соответствующего датчика импульсов преобразователя 8. указанный сигнал устанавливает в единичном состоянии триггер 16 (.1.7) , сигнал с прямого выхода последнего через элементы И
0 18(19 )устанавливает в соответствующее состояние RS-триггер 20 и обеспечивает команду для светового сигнала с выхода 21 (22. 4 В случае переключения RS-триггера 20 переклю5чается сигнал блокировки на управляющих входах элемента 2И-ИЛИ 11, и,тем самым, обеспечивается переключение каналов цепи обратной связи. Переключение разрёшаетс-я лишь
0 при наличии резервного канала в ис-, правном состоянии, которое характе-i ризуется состоянием триггера. 17 .-(16 J, В случае неисправности резервного ; канала сигнал нуля с инверсного вы-i
5 хода RS-триггера этого канала (например, триггер 17) блокирует, эле- ; мент И рабочего канала (в данном ; случае элемент И 19). Очевидно, что каждый из каналов может быть как ра0бочим, так и резервным. Последнее определяется исходным состоянием триггера 20.- .
Первоначальная установка .триггеров 16 -и 17 производится импульсом
5 сброса на входе 23 и при необходимости может периодически повторяться с низкой частотой.,
Таким образом, предлагаемый цифровой регулятор обеспечивает резер-.
0 вирование элементов системы, находящихся в наиболее тяжелых эксплуа- тационных условиях - первичных преобразователей, связанных непосредственно с исполнительным двигате5лем. Это повышает надежность регулятора и обеспечивает получение определенного технико-экономического эффекта в случае его применения;
fs,,2 tinNililliliiintlllllflllflilllllilllllllilinilHlflllllil
вь/х. Bbif.B-Z
5б/л. (рорм. 9 -L Вых.(рорм.Ю -
((l2Sffo N 0.75fio)
Вш.81 I11L-JLJi
Bbij(.8-Z 1I
©
Выл. (рорм. 9 J-1L
Sanucb&otem //П1П111 1П111|11111ПШ|1П11П1111ИП11Г11И111|П11П11
.
Вых. И /4 L-1L

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления скоростью двигателя с самоконтролем | 1981 |
|
SU1061107A1 |
| Цифровой регулятор | 1982 |
|
SU1019397A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Устройство для измерения и регулирования соотношения скоростей | 1984 |
|
SU1224726A1 |
| Устройство для автоматического регулирования температуры заготовки при непрерывно-последовательном индукционном нагреве | 1981 |
|
SU1023672A1 |
| Система для программного управления | 1985 |
|
SU1251033A1 |
| Электронные часы | 1988 |
|
SU1720061A1 |
| Цифровой измеритель угловой скорости | 1988 |
|
SU1509741A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СЛОЖНЫХ СИГНАЛОВ | 1988 |
|
SU1841042A1 |
| Пропорционально-интегральныйРЕгуляТОР | 1979 |
|
SU832528A1 |

ЦИФРОВОЙ РЕГУЛЯТОР, содержащий последовательно соединенные генератор опорной частоты, преобразователь код - частота, делитель частоты, блок сравнения, преобразователь код - напряжение, блок управления и двигатель, вал оторого ме-. ханически связан с преобразователем скорость - частота, отлич ающ и и с я тем, что, с целью повышения надежности регулятора, в него введены счетчики импульсов, элементы И, RS-триггеры, формирователи импульсов и элемент 2И-ИЛИ, выход которого соединен с вторым входом блока сравнения, а первые входы соответственно с выходами первого и второго формирователей импульсов и R-входами первого и второго счетчи- ков,С-входы которых подключены к ВЫХОДУ преобразоватёля код - частота, а выходы старших разрядов через первый и второй элемента И - к S-входам первого и второго RS-триггеров, R-входы которых соединены с обнуляющим входом регулятора, прямые выхо.ды - соответственно с первыми входами третьего и четвертого элементов .И и сигнальными выходами регулятора, а инверсные выходы - с вторыми вхо% дами четвертого и третьего элементов И, выходами подключенных соответственно к R-входу и 5-входу третьего RS-триггера, прямой и версный выходы которого соединены -tJ вторыми входами элемента 2И-ИЛИ, причем выходы преобразователя скорость-частота подключены к входам соответствующих формирователей импульсов. QQ СО
Выи .срорм.9 111-L
. в счет. У1111П11111111111ИМ(ПМ11111|111И11111П11П1П11111111
«
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Батоврин А.А | |||
| и др | |||
| Цифровые систекы управления электроприводами | |||
| Л., Энергия, 1977, с, 18 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Клавиатура для музыкального инструмента кравцова | 1977 |
|
SU765866A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| . | |||
