/ «ад;/
2
г
Viii
сл
со
Oliii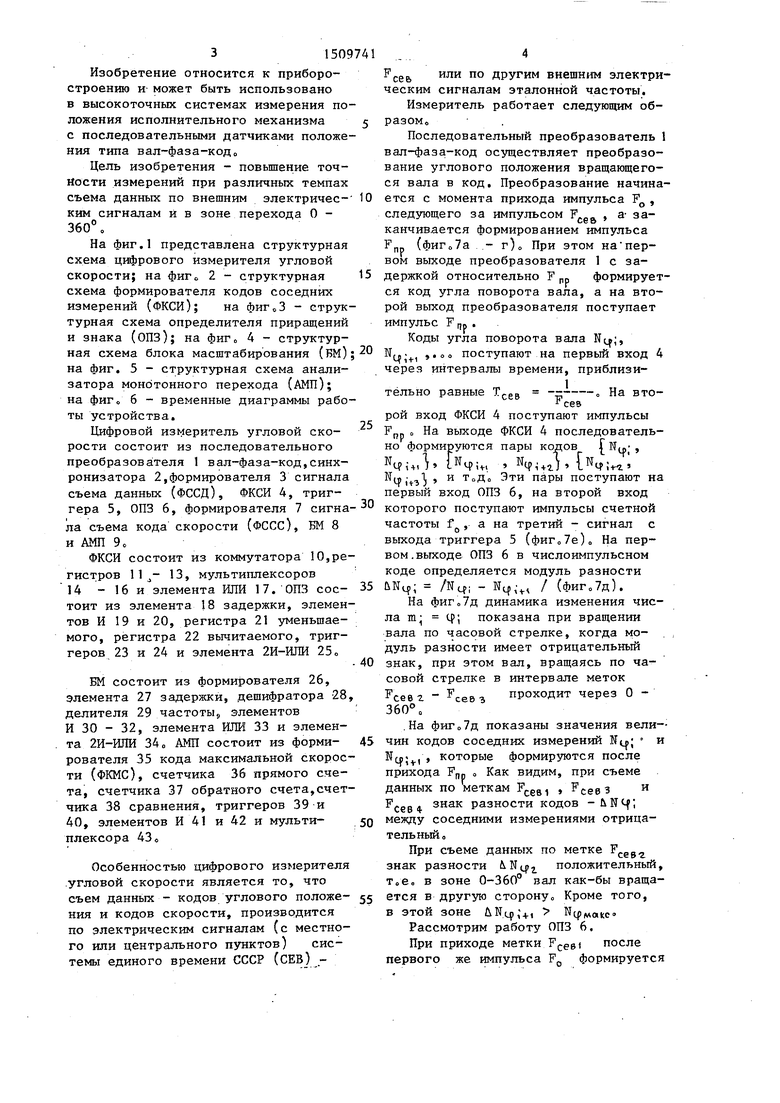
| название | год | авторы | номер документа |
|---|---|---|---|
| Функциональный преобразователь | 1986 |
|
SU1352476A1 |
| Анализатор спектра Фурье | 1985 |
|
SU1302293A1 |
| Цифровой генератор | 1986 |
|
SU1347164A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1119050A1 |
| Многоканальный программируемый генератор импульсов | 1988 |
|
SU1638793A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| Устройство для сравнения фаз | 1983 |
|
SU1125696A1 |
| Многоканальный измеритель интенсивности импульсов | 1991 |
|
SU1807423A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| ОДНОКАНАЛЬНЫЙ КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ЧАСТОТНЫХ ИСКАЖЕНИЙ | 2009 |
|
RU2393491C2 |


Изобретение относится к приборостроению и может быть использовано в высоточных системах измерения углового положения исполнительного механизма с последовательными датчиками положения типа вал-фаза-код. Цель - повысить точность измерений при различных темпах съема данных по внешним электрическим сигналам и в зоне перехода 0-360°. Цифровой измеритель угловой скорости содержит последовательный преобразователь вал-фаза-код 1, синхронизатор 2, формирователь 3 сигнала съема данных, формирователь 4 кодов соседних измерений, триггер 5, определитель приращений и знака 6, формирователь 7 сигнала съема скорости, блок масштабирования 8, анализатор монотонного перехода 9. Измеритель вписывается в аппаратно-программные структуры, использующие микроЭВМ или спецвычислители. 3 з.п.ф-лы. 6 ил.
фие.Г
31509
Изобретение относится к приборостроению и может быть использовано в высокоточных системах измерения положения исполнительного механизма с последовательными датчиками положения типа вал-фаза-кодо
Цель изобретения - повышение точности измерений при различных темпах съема данных по внешним электричесКИМ сигналам и в зоне перехода О - 360° о
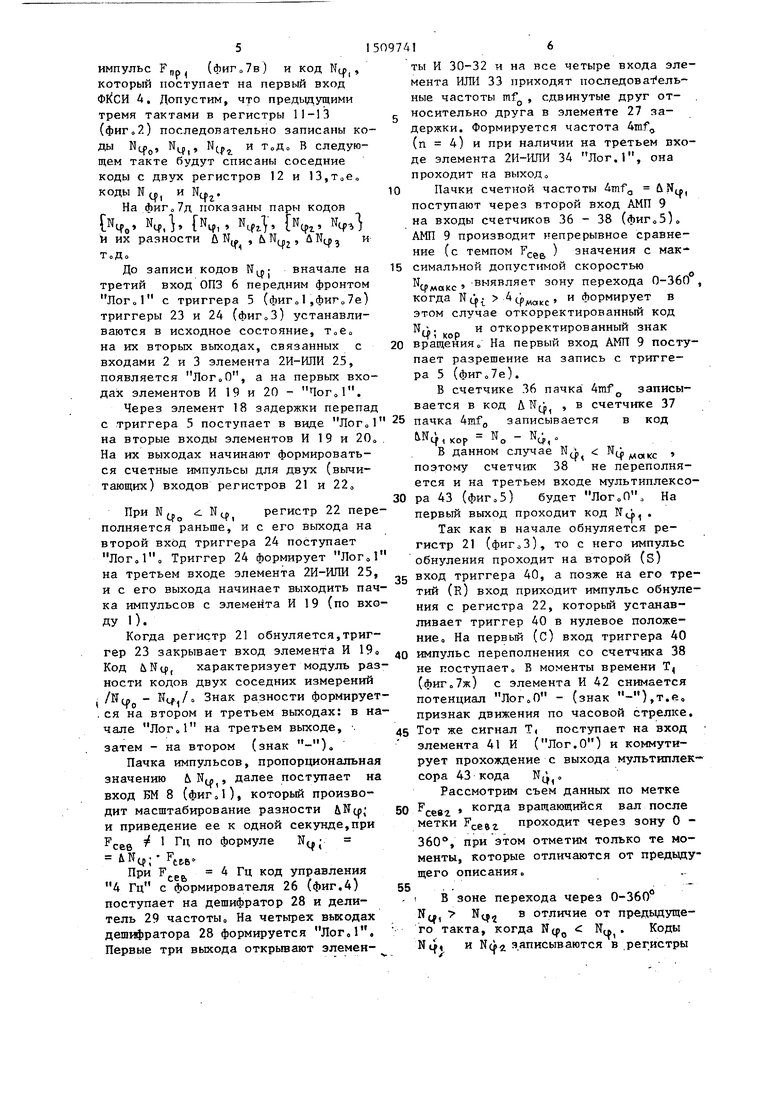
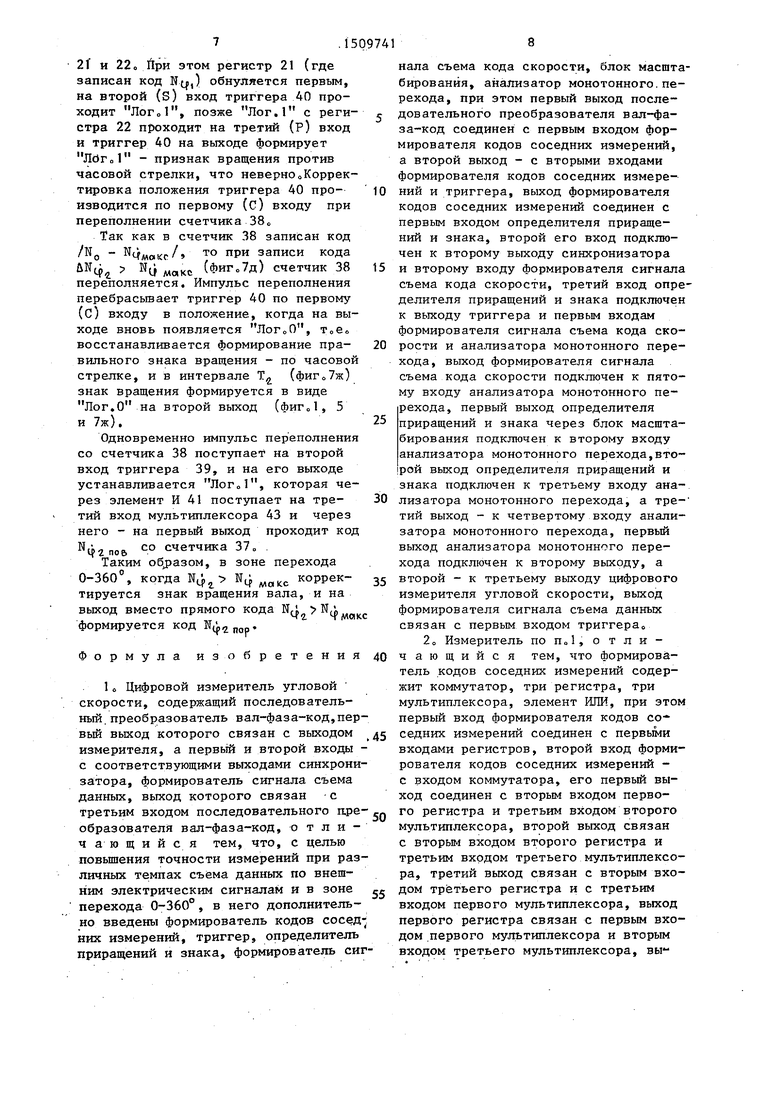
На фиг.1 представлена структурная схема цифрового измерителя угловой скорости; на фиг о 2 - структурная схема формирователя кодов соседних измерений (ФКСИ); на фиГоЗ - структурная схема определителя приращений и знака (ОПЗ); на фиг„ А - структурная схема блока масштабирования (БМ) на фиг. 5 - структурная схема анализатора монотонного перехода (АМП); на фиг о 6 - временные диаграммы работы устройства.
Цифровой измеритель угловой скорости состоит из последовательного преобразова теля 1 вал-фаза-код, синхронизатора 2,формирователя 3 сигнала съема данных (ФССД), ФКСИ 4, триггера 5, ОПЗ 6, формирователя 7 сигнала съема кода скорости (ФССС), БМ 8 и АМП 9с
ФКСИ состоит из коммутатора 10,регистров 11J- 13, мультиплексоров 14 - 16 и элемента ИЛИ 17. ОПЗ сое- тоит из элемента 18 задержки, элементов И 19 и 20, регистра 21 уменьшаемого, регистра 22 вычитаемого, триггеров 23 и 24 и элемента 2И-ШШ 25
БМ состоит из формирователя 26, элемента 27 задержки, дешифратора 28, делителя 29 частоты элементов И 30 - 32, элемента ИЛИ 33 и элемента 2И-ИЛИ 34 о АМП состоит из форми- рователя 35 кода максимальной скорости (ФКМС), счетчика 36 прямого счета, счетчика 37 обратного счета,счетчика 38 сравнения, триггеров 39 и 40, элементов И 41 и 42 и мульти- плексора 43
Особенностью цифрового измерителя .угловой скорости является то, что съем данных - кодов углового положе- ния и кодов скорости, производится по электрическим сигналам (с местного или центрального пунктов) системы единого времени СССР (СЕВ) ° другим внешним электрическим сигналам эталонной частоты.
Измеритель работает следующим образом.
Последовательный преобразователь 1 вал-фаза-код осуществляет преобразование углового положения вращающегося вала в код. Преобразование начинается с момента прихода импульса F , следующего за импульсом , а- заканчивается формированием импульса FP (фиго7а - г)о При этом на пер- вом выходе преобразователя 1 с задержкой относительно F
пр
формируется код угла поворота вала, а на второй выход преобразователя поступает импульс F р . .
Коды угла поворота вала Nq,;, qij, ,.00 поступают на первый вход 4 через интервалы времени, приблизительно равные Tj-gg „ На рой вход ФКСИ 4 поступают импульсы
Fpp о На выходе ФКСИ 4 последовательно формируются пары KOj3;oB Ng,; ,
N
IO сЬормирун
. iN
N,
Ч-иг
.Т
l-Z.
q U. J .
Nqij.j lj , и ТоДо Эти пары поступают на
первый вход ОПЗ 6, на второй вход которого поступают импульсы счетной частоты fд, а на третий - сигнал с выхода триггера 5 (фиго7е), На первом, выходе ОПЗ 6 в числоимпульсном коде определяется модуль разности - / (фиГо7д).
На фиг,7д динамика изменения числа т (f показана при вращении вала по часовой стрелке, когда мо- дуль разности имеет отрицательньй знак, при этом вал, вращаясь по часовой стрелке в интервале меток
- F
сев э
проходит через О г 360° о
.На фиг„7д показаны значения величин кодов соседних измерений 11(; и
N
4 Ui
которые формируются после
прихода о Как видим, при съеме данных по меткам , , и знак разности кодов -liNtf; между соседними измерениями отрицательный
При съеме данных по метке (-еъ-г. знак разности положительный, т.е. в зоне 0-360 вал как-бы вращается в другую сторонуо Кроме того, в этой зоне йИц), ц., Ntpiwoittc
Рассмотрим работу ОПЗ 6.
При приходе метки после первого же импульса F формируется
импульс Fpp (фиго7в) и код Nqj, который поступает на первый вход А, Допустим, что предьщущими тремя тактами в регистры 11-13 (фиго2) последовательно записаны кои ТоДо В следую
ды N
tfo
N,, N,
щем такте будут списаны соседние коды с двух регистров 12 и 13,Тое„ коды Nq)| и Nq,,
На фиГо7д показаны пары кодов
Ко Ч% fN, N,j, N,,
и их разности UN( , bN
ч qi2 N413
ТоДо
До записи кодов вначале на третий вход ОПЗ 6 передним фронтом Лог„1 с триггера 5 (фигЛ,фиГо7е) триггеры 23 и 24 (фиГоЗ) устанавливаются в исходное состояние, Тое на их вторых выходах, связанных с входами 2 и 3 элемента 2И-Ш1И 25, появляется , а на первых входах элементов И 19 и 20 - Пого1.
Через элемент 18 задержки перепа с триггера 5 поступает в виде Лог на вторые входы элементов И 19 и 20 На их выходах начинают формироваться счетные импульсы для двух (вычитающих) входов регистров 21 и 22,
При N (. - регистр 22 переполняется раньше, и с его на второй вход триггера 24 постулает Лого1 о Триггер 24 формирует ЛоГо
Так как в начале обнуляется регистр 21 (фиГоЗ), то с него импульс обнуления проходит на второй (s)
на третьем входе элемента 2И-Ш1И 25, од триггера 40, а позже на его тре- и с его выхода начинает выходить пач- (j) приходит импульс обнуления с регистра 22, который устанавливает триггер 40 в нулевое положека импульсов с элемента И 19 (по вхоДУ 1).
Когда регистр 21 обнуляется,триггер 23 закрывает вход элемента И 19 ц импульс переполнения со счетчика 38 Код ЬМц), характеризует модуль раз- д поступает,, В моменты времени Т,
(фиГо7ж)
ние„ На первый (с) вход триггера 40
ности кодов двух соседних измерений I /N(9 - N(.,7 о Знак разности формирует- . ся на втором и третьем выходах: в начале Логв на третьем выходе, . затем - на втором (знак -)«
Пачка импульсов, пропорциональная значению bNq,, далее поступает на вход ВМ 8 (фиГоО, который производит масштабирование разности &Nq) и приведение ее к одной секунде,при
N,
i - 4 Гц код управления
сев ° формуле
Ntp;-F,,b,
При Fj,gg
4 Гц с формирователя 26 (фиг.4) поступает на дешифратор 28 и делитель 29 частоты о На четырех выходах дешифратора 28 формируется ЛоГо1. Первые три выхода открьгоают элеменс элемента И 42 снимается потенциал ЛогоО - (знак -),т.е, признак движения по часовой стрелке.
45 Тот же сигнал Т поступает на вход элемента 41 И (Лог.О) и коммутирует прохождение с выхода мультиплексора 43 кода Nj ,
Рассмотрим съем данных по метке
вращающийся вал после метки Fj.gj2. проходит через зону О - 360°, при этом отметим только те моменты, которые отличаются от предыдущего описания о
55
В зоне перехода через 0-360°
N(,,
N
42
в отличие от предыдущего такта, когда N .
% %ri
N4}
Коды и N(i записываются в рег.истры
5097416
ты и 30-32 и на все четыре входа элемента ИЛИ 33 приходят последователь
ные частоты mf, сдвинутые друг относительно друга в элемейте 27 задержки. Формируется частота 4mf (п 4) и при наличии на третьем входе элемента 2И-ИЛИ 34 Лог., она проходит на выход о
Пачки счетной частоты 4mf- UN,
о Ц
поступают через второй вход АМП 9 на входы счетчиков 36 - 38 (фиг„5)о АМП 9 производит непрерывное сравнение (с темпом F(.gg ) значения с мак- симальной допустимой скоростью
N,
Cf макс
выявляет зону перехода 0-360 , когда NC), формирует в этом случае откорректированный код Nji. и откорректированный знак 0 вращения На первый вход АМП 9 поступает разрешение на запись с триггера 5 (фиго7е).
В счетчике 36 пачка 4mf„ записыпачка 4mfo
вается в код Д N,;
qi, . записывается
в счетчике 37 в код
пачка 4mfo
bNt,Kop о - ,
В данном случае N ; Nq, д. , поэтому счетчик 38 не переполняется и на третьем входе мультиплексо- 30 ра 43 () будет Лог„О, На первый выход проходит код , .
Так как в начале обнуляется регистр 21 (фиГоЗ), то с него импульс обнуления проходит на второй (s)
од триггера 40, а позже на его тре- (j) приходит импульс обнуления с регистра 22, который устанавливает триггер 40 в нулевое положеимпульс переполнения со счетчика 38 д поступает,, В моменты времени Т,
ние„ На первый (с) вход триггера 40
(фиГо7ж)
с элемента И 42 снимается потенциал ЛогоО - (знак -),т.е, признак движения по часовой стрелке.
45 Тот же сигнал Т поступает на вход элемента 41 И (Лог.О) и коммутирует прохождение с выхода мультиплексора 43 кода Nj ,
Рассмотрим съем данных по метке
вращающийся вал после метки Fj.gj2. проходит через зону О - 360°, при этом отметим только те моменты, которые отличаются от предыдущего описания о
55
В зоне перехода через 0-360°
N(,,
N
42
в отличие от предыдущего такта, когда N .
% %ri
N4}
Коды и N(i записываются в рег.истры
.150
2f и 22o rtpH этом регистр 21 (где записан код Wtf,) обнуляется первым, на второй (s) вход триггера 40 проходит Лого1, позже Лог.1 с реги- стра 22 проходит на третий (р) вход и триггер 40 на выходе формирует ЛйГо - признак вращения против часовой стрелки, что неверно оКорректировка положения триггера 40 про- изводится по первому (с) входу при переполнении счетчика 38
Так как в счетчик 38 записан код /Kg - Nti,Q,p/, то при записи кода uNq, (фиго7д) счетчик 38 переполняется. Импульс переполнения перебрасьшает триггер 40 по первому (с) входу в положение, когда на выходе вновь появляется Лог„О, Тое восстанавливается формирование пра- вильного знака вращения - по часовой стрелке, и в интервале Т (фиго7ж) знак вращения формируется в виде Лог.О на второй выход (фиго1, 5 и 7ж).
Одновременно импульс переполнения со счетчика 38 поступает на второй вход триггера 39, и на его выходе устанавливается Лого1, которая через элемент И 41 поступает на тре- тий вход мультиплексора 43 и через него - на первый выход проходит код
. ° «счетчика 37.
Таким образом, в зоне перехода 0-360°, когда N,J, , „ коррек- тируется знак вращения вала, и на выход вместо прямого кода q. Ч менее формируется код .
Формула изобретения
1 о Цифровой измеритель угловой скорости, содержащий последовательный, преобразователь вал-фаза-код,первый выход которого связан с выходом измерителя, а первьй и второй входы - с соответствующими выходами синхронизатора, формирователь сигнала съема данных, выход которого связан -с третьим входом последовательного щзе- образователя вал-фаза-код, отличающийся тем, что, с целью повьшения точности измерений при различных темпах съ1ема данных по внешним электрическим сигналам и в зоне перехода 0-360°, в него дополнительно введены формирователь кодов соседних измерений, триггер, определитель приращений и знака, формирователь сиг8
нала съема кода скорости, блок масштабирования, анализатор монотонного.перехода, при этом первый выход последовательного преобразователя вал-фаза-код соединен с первым входом формирователя кодов соседних измерений, а второй выход - с вторыми входами формирователя кодов соседних измерений и триггера, выход формирователя кодов соседних измерений соединен с первым входом определителя приращений и знака, второй его вход подключен к второму выходу синхронизатора и второму входу формирователя сигнала съема кода скорости, третий вход определителя приращений и знака подключен к выходу триггера и первым входам формирователя сигнала съема кода скорости и анализатора монотонного перехода, выход формирователя сигнала съема кода скорости подключен к пятому входу анализатора монотонного перехода, первый выход определителя приращений и знака через блок масштабирования подключен к второму входу анализатора монотонного перехода,второй выход определителя приращений и знака подключен к третьему входу анализатора монотонного перехода, а третий выход - к четвертому входу анализатора монотонного перехода, первый выход анализатора монотонного перехода подключен к второму выходу, а второй - к третьему выходу цифрового измерителя угловой скорости, выход формирователя сигнала съема данных связан с первым входом триггера
2о Измеритель по По1, отличающийся тем, что формирователь кодов соседних измерений содержит коммутатор, три регистра, три мультиплексора, элемент ИЛИ, при этом первый вход формирователя кодов со седних измерений соединен с первыми входами регистров, второй вход формирователя кодов соседних измерений - с входом коммутатора, его первый выход соединен с вторым входом первого регистра и третьим входом второго мультиплексора, второй выход связан с вторым входом второго регистра и третьим входом третьего мультиплексора, третий выход связан с вторым входом третьего регистра и с третьим входом первого мультиплексора, выход первого регистра связан с первым входом .первого мультиплексора и вторым входом третьего мультиплексора, вы
ход второго регистра соединен с пер- вь1м входом второго мультиплексора и вторым входом первого мультиплексора выход третьего регистра соединен с первым входом третьего мультиплексора и вторым входом второго мультиплексора, выходы трех мультиплексоров соединены с соответствующими входами элемента ИЛИ, а его выход - с выходной шиной формирователя кодов соседних измерений
Зо Измеритель по п.1, отличающийся тем, что анализатор монотонного перехода содержит форми- рователь кода максимальной скорости, счетчики прямого и обратного счета, счетчик сравнения, два триггера,два элемента И, мультиплексор, при этом первьй вход анализатора монотонного перехода связан с первыми входами счетчиков и триггера, второй вход связан с вторыми входами счетчиков, третий вход счетчика сравнения связа с выходом формирователя кода макси- мальной скорости, выходы счетчиков прямого и обратного счета связаны с первым и вторым входами мультиплексора соответственно, выход счетчика сравнения связан с первым входом триггера и вторым входом триггера, второй и третий вход триггера связаны с третьим и четвертым входом анализатора монотонного перехода соответственно, выход триггера связан с первым входом первого- элемента И,выход второго триггера соединен с первым входом второго элемента И,вторые входы элементов И соединены с
пятым входом анализатора монотонного перехода, вькод второго элемента И соединен с вторым выходом анализатора монотонного перехода, выход первого элемента И соединен с третьим входом мультиплексора, а его выход соединен с выходной шиной анализатора монотонного перехода,
4о Измеритель по п. 1, о т л и - чающийся тем, что блок масштабирования содержит формирователь,элемент задержки, дешифратор, делитель частоты, три элемента И, элемент ИЛИ и элемент 2И-ИЛИ, при этом входная шина блока масштабирования соединена с входом элемента задержки, с первым входом делителя частоты и с четвертьи входом элемента ИЛИ, выход формирователя соединен с входом дешифратора и с вторым входом делителя частоты,выход которого соединен с третьим входом элемента 2И-Ш1И, первый и третий выходы элемента задержки соединены с первыми входами первого и второго элементов И соответственно,вторые входы которых соединены с первым и третьим выходами дешифратора, а вторые выходы дешифратора и элемента задержки соединены с первым и вторым входами третьего элемента И,вь1ходы первого, второго и третьего элементов И соединены с первыми тремя входами элемента ИЛИ, выход которого соединен с первым входом элемента 2И-ШШ, второй вход которого соеди- йен с четвертым выходом дешифратора, а выход - с выходной шиной блока :масштабирования«
Фиг. г
ФиеЛ
фиг. 5
,t I rr
| Цифровой измеритель скорости для микропроцессорных систем | 1984 |
|
SU1269028A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
