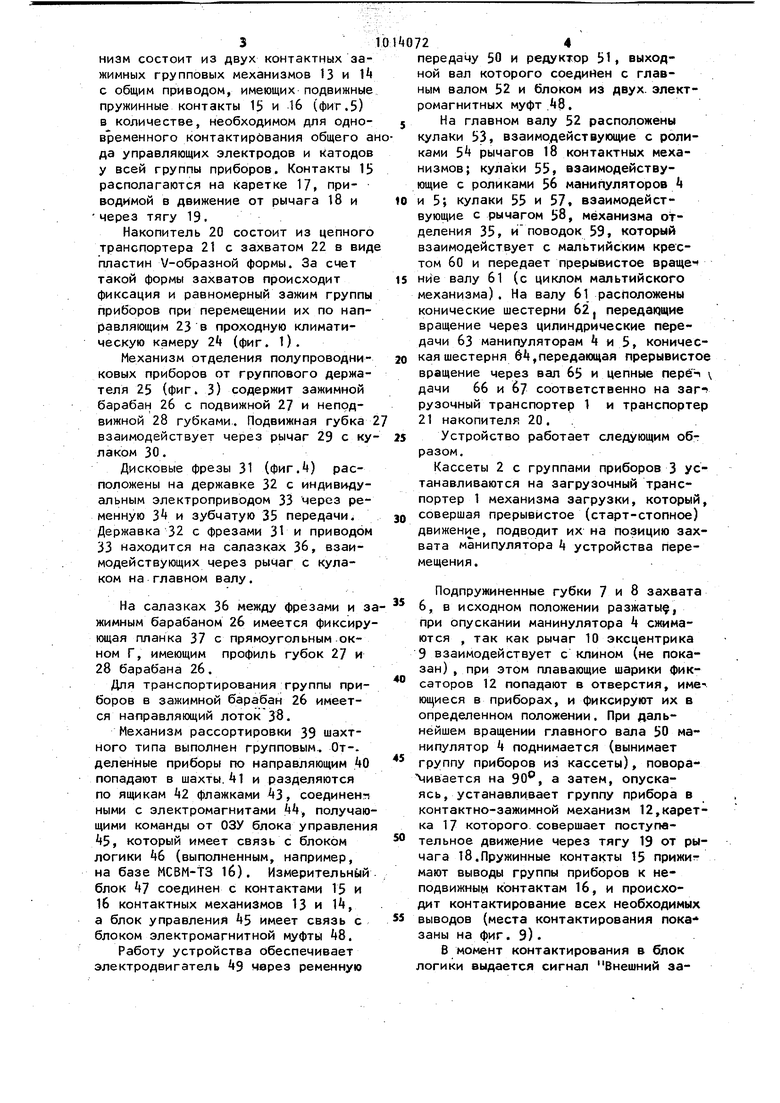
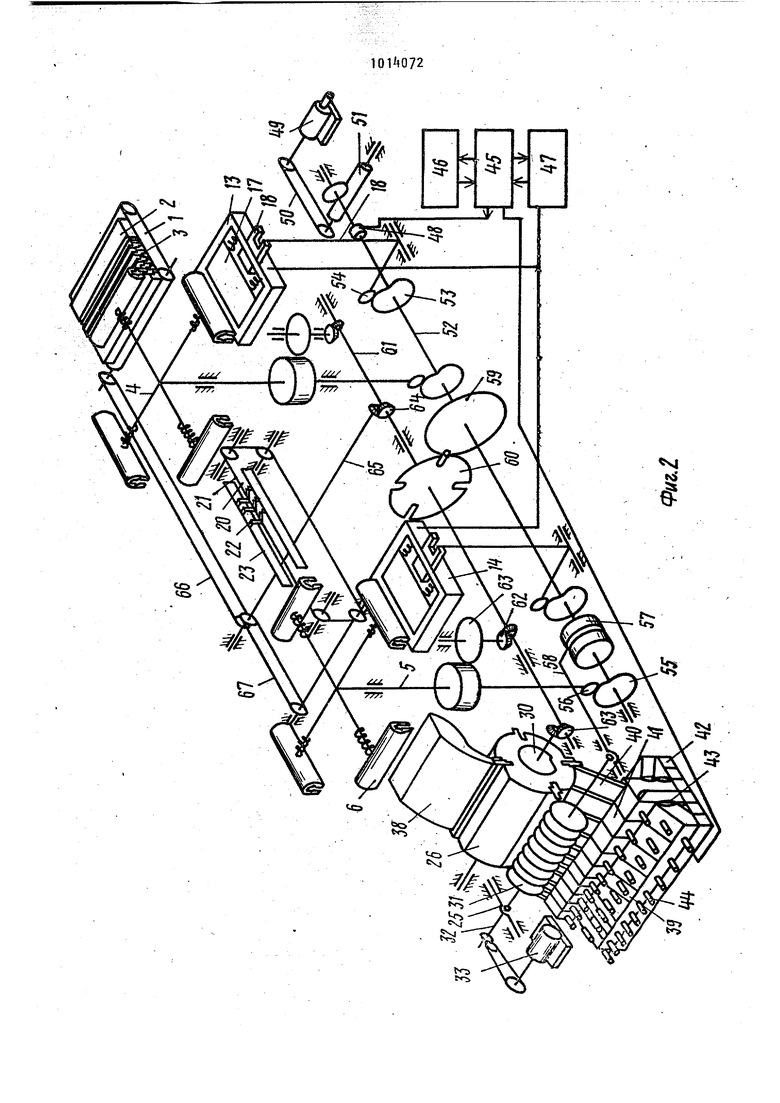
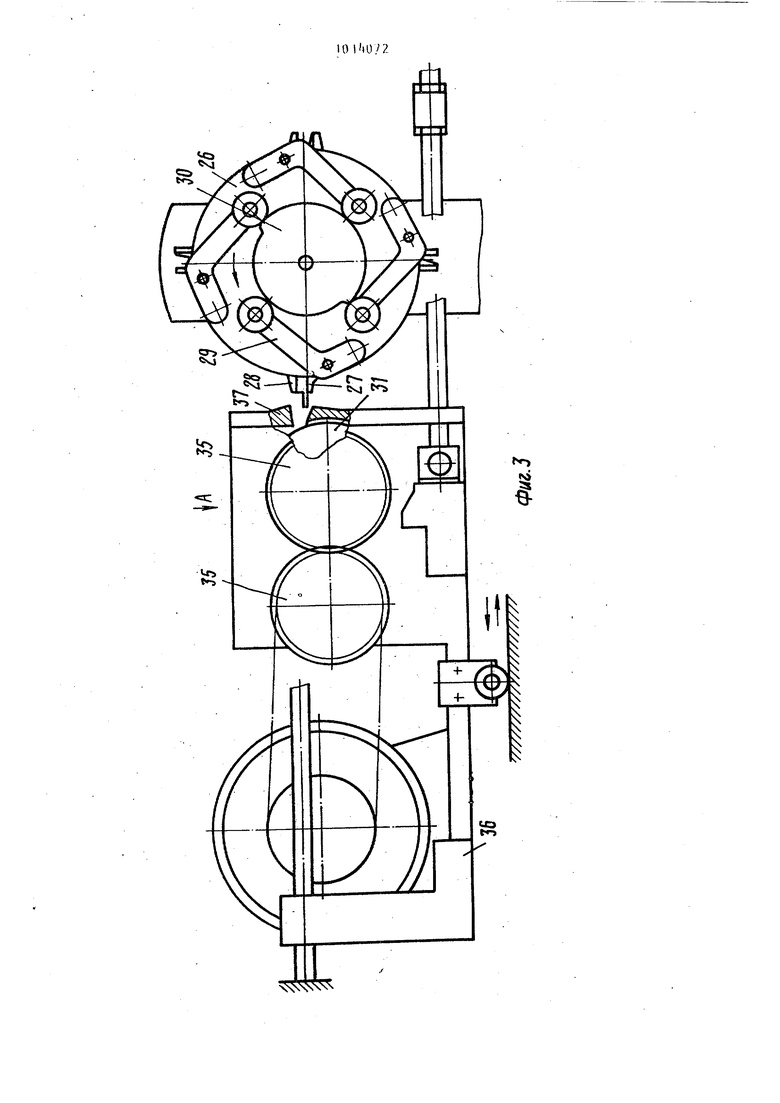
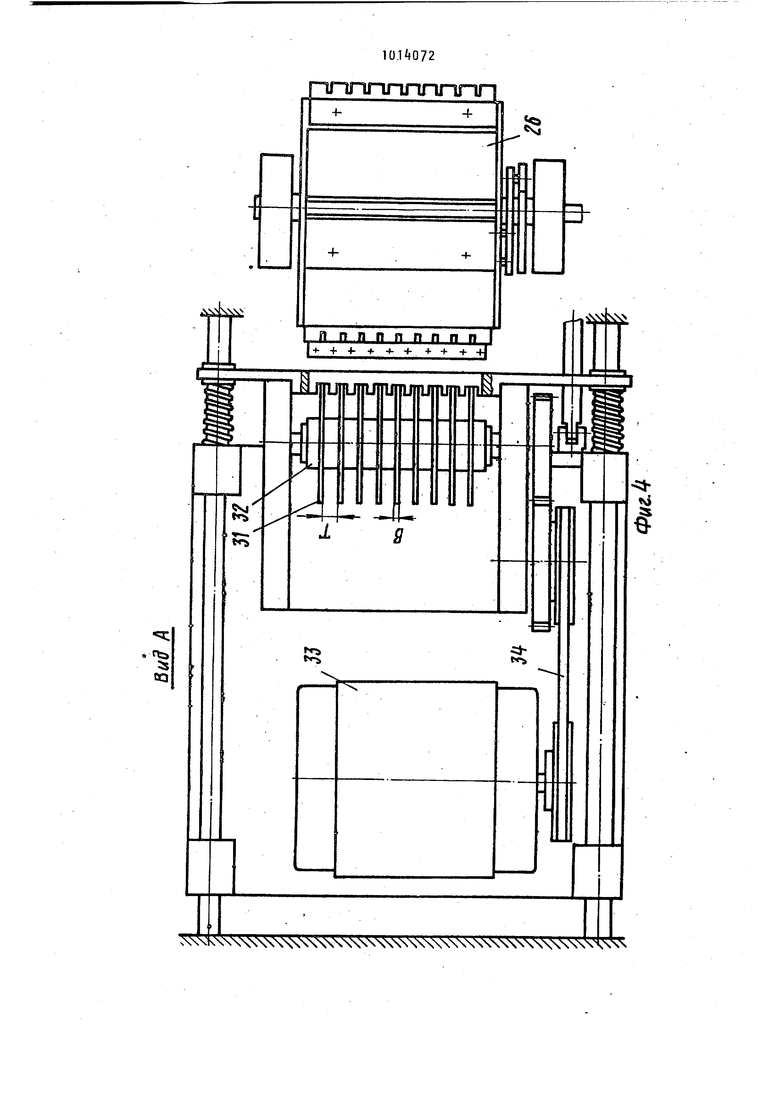
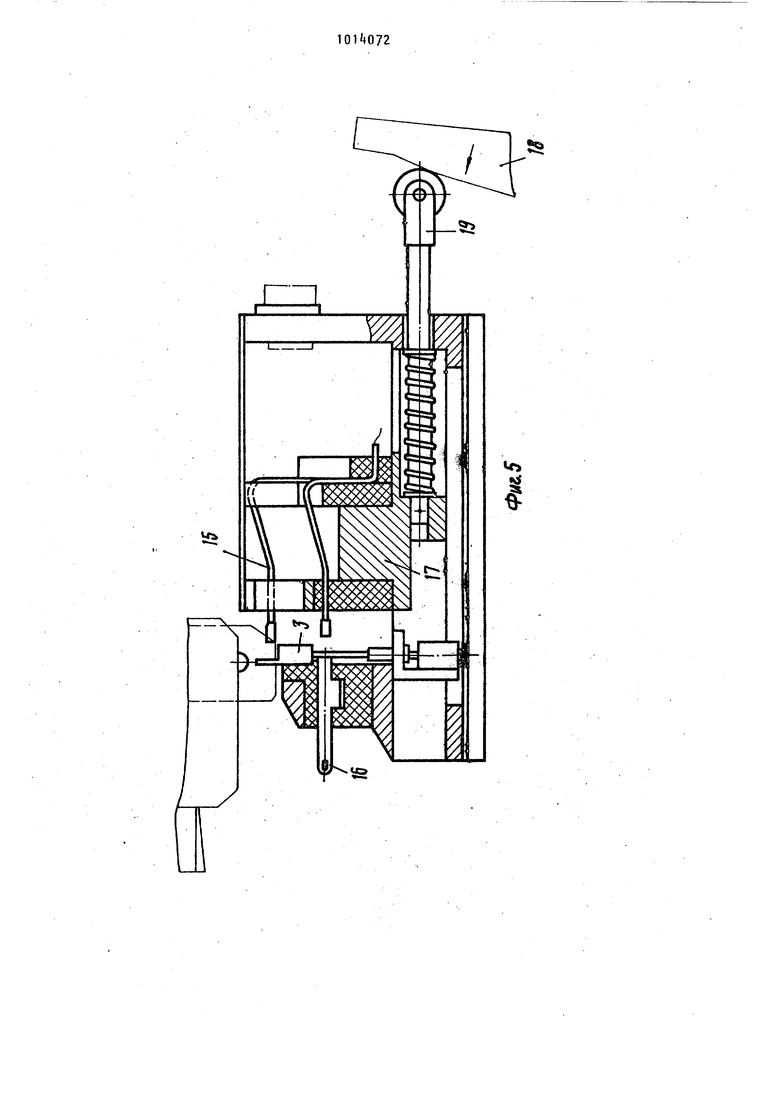
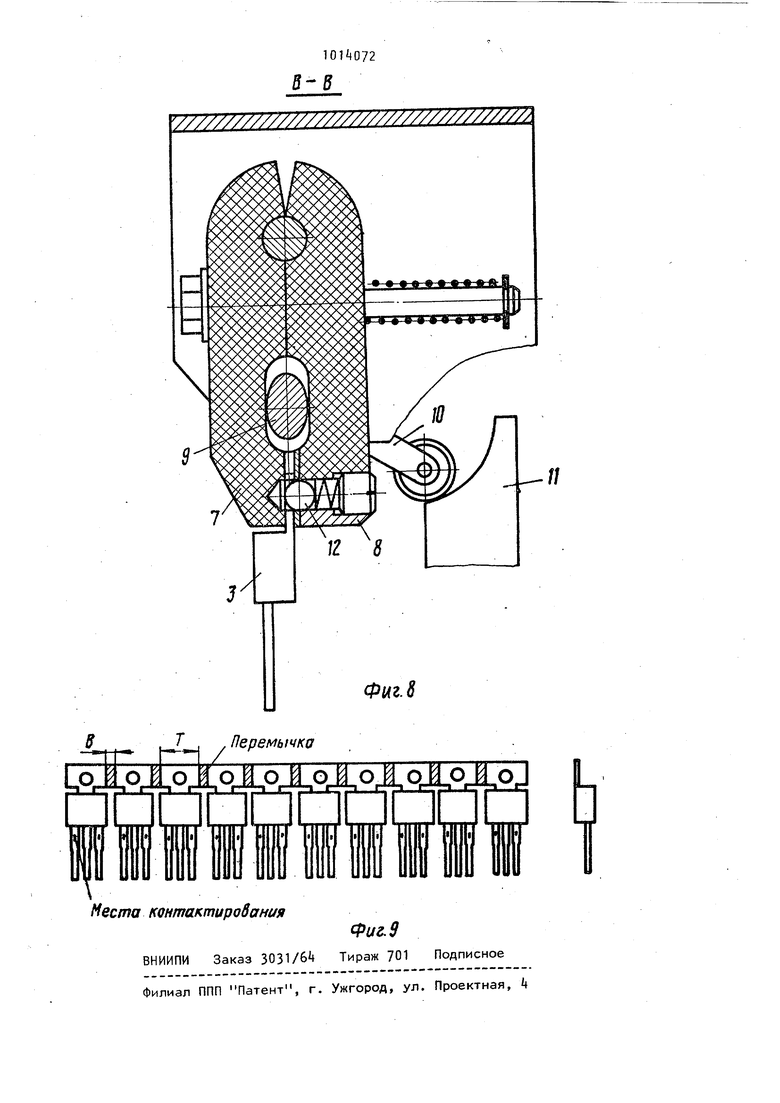
Изобретение относится к техноло гическому оборудованию для производства полупроводниковых приборов и может быть использовано,на предп ятиях полупроводниковой промышленности, выпускающих транзисторы и т ристоры групповым способом для испытания и рассортировки их по клас сификационным группам. Известен полуавтомат разбраковки транзисторов по параметрам, содержащий загрузочное и подключающе устройства, расположенные на карус ли, совершающей старт-стопное движение , измерительный пост и пост разгрузки, отсекатель и распредели тельный вал с системой кулачков и электропривод U П. Однако такой полуавтомат имеет относительно низкую производитель ность и предназначен, в основном, для разбраковки транзисторов в металлических корпусах поштучно. Наиболее близким по технической сущности к изобретению является устройство для сортировки полупроводниковых приборов по электрическим Т1араметрам, преимущественно на групповом держателе, содержащее соединенные с приводом механизм загрузки, манипулятор, контактный механизм, электрически соединенный с измерительным блоком, механизм отделения полупр водниковых приборов от группового держателя и механизм рассортировки с приемной тарой 2 . Однако известное устройство мал производительно и не позволяет . осуществлять комплексную проверку электрических параметров полупроводниковых приборов одновременно в климатической камере и в нормальных условиях. Цель изобретения - повышение до товерности измерения электрических параметров и производительности в боту . 1 Указанная цель достигается тем , что устройство для сортировки полу проводниковых приборов по электрич ким параметрам преимущественно на групповом держателе, содержащее соединенные с приводом механизм за рузки, электрически соединенные с измерительным блоком механизм отделения полупроводниковых приборов группового держателя и механизм рассортировки с приемной тарой, снабжено проходной климатической камерой и дополнительными манипулятором и контактным механизмом, при| чем транспортер-накопитель, дополнительные манипулятор и контактный механизм расположены в проходной климатической камере, а механизм отделения полупроводниковых приборов от группового держателя расположен между проходной климатической камерой и механизмом рассортировки и выполнен в виде барабана с зажимными губками для групповых держателей полупроводниковых приборов и дисковых фрез, закреплен-i ных на салазках, кинематически соединенных с барабаном, -при этом каждый контактный механизм кинематически соединен с одним из манипуляторов . Кроме того, механизм отделения полупроводниковых приборов от группового держателя снабжен фиксатором зажимных губок барабана, выполненным в виде закрепленной на салазках подпружиненной планки с окном, имеющим форму профиля зажимных губок. На фиг. 1 представлено уоройство, общий вид; на фиг. 2- кинематическая схема устройства; на фиг.3механизм отделения полупроводниковых приборов от группового держателя; на фиг. - вид А на фиг. 3; на фиг. 5 - контактно-зажимной групповой механизм; на фиг. 6 - транспортер накопителя с захватом манипулятора; на фиг. 7- транспортер накопителя, разрез Б-Б на фиг. 6; на фиг. 8- захват манипупятора , разрез В-В на фиг. 7; на фиг. 9- группа приборов на групповом держателе, подлежащая классификации (указаны места контактирования и перемычки, подлежащие удалению). Устройство содержит механизм загрузки в виде транспортера 1, на который устанавливаются кассеты 2 с группами приборов 3. Механизм перемещения приборов, состоящий из двух засинхронизированных манипуляторов и f с четырьмя парами захватов 6 каждый. Захваты 6 имеют подпружиненные губки 7 и 8, эксцентрик 9, соединенный с рычагом 10, взаимодействующий с упором 11 (фиг.8). Губка 8 имеет фиксаторы 12 в виде плавающих шариков. Контактный меха3
ниэм состоит из двух контактных зажимных групповых механизмов 13 и И с общим приводом, имеющих подвижные пружинные контакты 15 и 1б (фиг.5) в количестве, необходимом для одновременного контактирования общего а да управляющих электродов и катодов у всей группы приборов. Контакты 15 располагаются на каретке 17 при- водимой в движение от рычага 18 и через тягу 19.
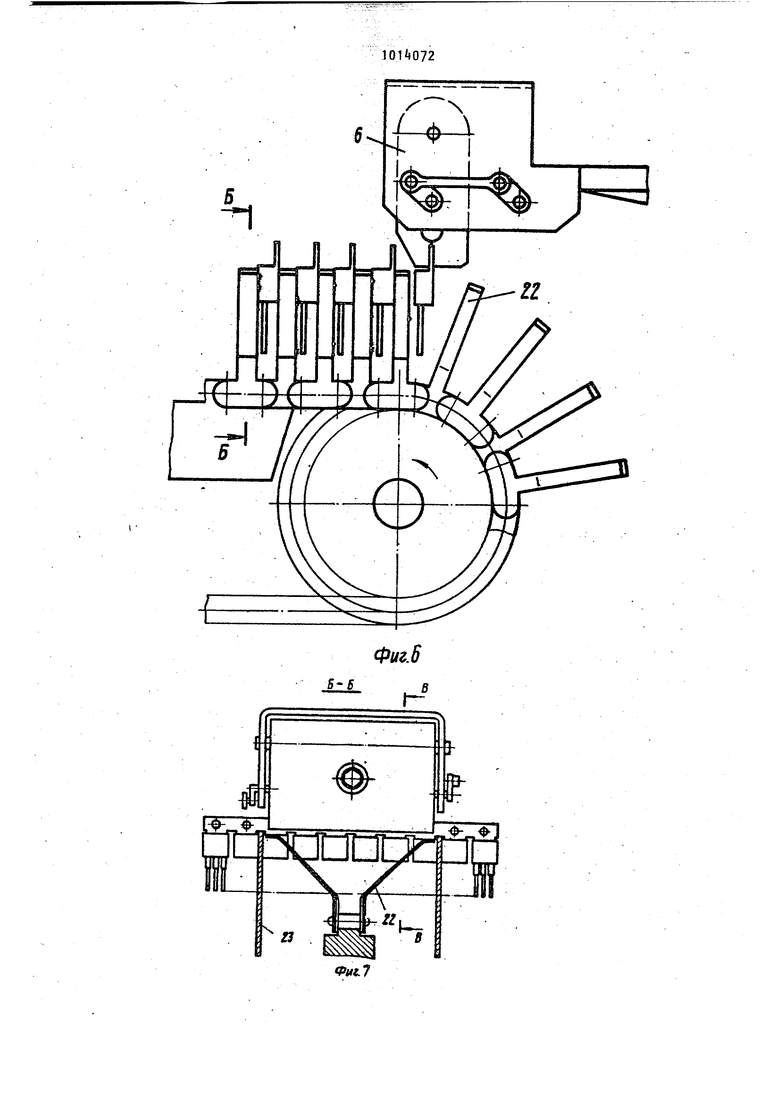
Накопитель 20 состоит из цепного транспортера 21 с захватом 22 в вид пластин V-образной формы. За счет такой формы захватов происходит фиксация и равномерный зажим группы приборов при перемещении их по направляющим 23 в проходную климатическую камеру 2 (фиг. 1) .
Механизм отделения полупроводниковых приборов от группового держателя 25 (фиг. 3) содержит зажимной барабан 26 с подвижной 27 и неподвижной 28 губками.. Подвижная губка взаимодействует через рычаг 29 с кулаком 30.
Дисковые фрезы 31 (фиг.) расположены на державке 32 с индивидуальным электроприводом 33 через ременную 3 и зубчатую 35 передачи. Державка 32 с фрезами 31 и приводом 33 находится на салазках 36, взаимодействующих через рычаг с купаком на главном валу.
На салазках 36 между фрезами и зажимным барабаном 2б имеется фиксирующая планка 37 с прямоугольным окном Г, имеющим профиль губок 27 и 28 барабана 26.
Для транспортирования группы приборов в зажимной барабан 26 имеется направляющий лоток 38.
Механизм рассортировки 39 шахтного типа выполнен групповым.. От-, деленные приборы по направляющим kQ попадают в шахты. 1 и разделяются по ящикам 2 флажками k3, соединенп ными с электромагнитами f, получающими команды от ОЗУ блока управления 5, который имеет связь с блоком логики 6 (выполненным, например, на базе МСВМ-ТЗ 1б). Измерительной блок соединен с контактами 15 и 16 контактных механизмов 13 и И, а блок управления А5 имеет связь с блоком электромагнитной муфты .
Работу устройства обеспечивает электродвигатель 49 через ременную
0724
передачу 50 и редуктор 51, выходной вал которого соединен с главным валом 52 и блоком из двух, электромагнитных муфтЛВ. 5 На главном валу 52 расположены кулаки 53, взаимодействующие с роликами 5 рычагов 18 контактных механизмов; кулаки 55, взаимодействующие с роликами 56 манипуляторов i
0 и 5; кулаки 55 и 57, взаимодействующие с рычагом 58, механизма отделения 35, и поводок 59, который взаимодействует с мальтийским крестом 60 и передает прерывистое враще-
5 ние валу 61 (с циклом мальтийского механизма). На валу б1 расположены конические шестерни 62, передающие вращение через цилиндрические передачи 63 манипуляторам и 5, коническая шестерня 6,передающая прерывистое вращение через вал б5 и цепные перёН , дачи 66 и б7 соответственно на загрузочный транспортер 1 и транспортер 21 накопителя 20..
5 Устройство работает следующим образом.
Кассеты 2 с группами приборов 3 устанавливаются на загрузочный транспортер 1 механизма загрузки, который,
Q совершая прерывистое (старт-стопное) движение, подводит их на позицию захвата манипулятора Ц устройства перемещения .
Подпружиненные губки 7 и 8 захвата
6, в исходном положении разжаты, при опускании манинулятора 4 сжимаются , так как рычаг 10 эксцентрика 9 взаимодействует с клином (не показан) , при этом плавающие шарики фиксаторов 12 попадают в отверстия, имеЮ1циеся в приборах, и фиксируют их в определенном положении. При дальнейшем вращении главного вала 50 манипулятор поднимается (вынимает
группу приборов из кассеты), повора ивается на , а затем, опускаясь, устанавливает группу прибора в контактно-зажимной механизм 12,каретка 17 которого совершает поступвтельное движение через тягу 19 от рычага 18.Пружинные контакты 15 прижиг мают выводы группы приборов к неподвижным контактам 16, и происхо/ т контактирование всех необходимых
5 выводов (места контактирования пока- заны на фиг. 9).
В момент контактирования в блок логики выдается сигнал Внешний запуск от бесконтактного датчика (не показан),.связанного с валом 52. По этому сигналу реализуется программа Измерение, заложенная в памяти блока логики и основанная на срав нении контролируемых параметров полу проводниковых приборов с заданными уставками. . Токи и напряжения определенной дл каждого режима измерения величины обеспечиваются генераторами измерительного блока 45. Измерения параметров, по которым производится конт роль и классификация полупроводниковых приборов, осуществляется цифровы ми измерительными приборами и анало говыми схемами (компараторами) измерите/fbHoro блока , Длительность работы программы Из мерение зависит от конкретной прина лежности каждого полупроводникового прибора к одной из классификационных групп: приборы отбракованные (или переведенные в низшую группу ) поодному из параметров последующему контролю не подвергаются. Таким образом, на различные группы приборов может быть использовано разное время на измерение параметров. Длительность контактирования выражается формулой t-i-t постоянное пеуемениоя Величина t постоянная равна минип мальному промежутку времени, необходимому для измерения параметров полупроводниковых приборов (случай, когда все приборы - брак) и задается цик лом (узлами 58 и 59) мальтийского механизма. Величина tпepe eнжi5lЗздaeтcя программно для каждого конкретного случая и определяется временем отключения блока электромагнитных муфт 47, который отключается по сигналу от блока управления kk в том случае, если необходимое 2. TiocTo$ v Moe и находится в этом состоянии до тех пор, пока не кончится контроль параметров последнего полупроводникового прибора в группе приборов, находящихся в первом контактно-зажимном механизме .12. Далее по сигналу блока управления 45 включается блок электромагнитных муфт tS, вал 52 поворачивается, рычаг 18 освобождает тягу 19, и каретка 17 с подпружиненными контактами 13 отходит от выводов группы приборов. При этом манипулятро 4 поднимается, поворачивается на и снова опускается,, устанавливая группу приборов на направляющие 23 накопителя 20. В этот момент кулак 10 взаимодей ствует с упором 11, эксцентрик 9 поворачивается и разжимает подпружиненные губки 7 и 8, освобождая группу приборов (в это( время на позициях захвата и контактирования операции повторяются). При следующем цикле манипулятор снова поднимается и поворачивается на 90®, а транспортер, 21 накопителя 20 делает один шаг, при этом группа приборов на направляющих 23 зажимается V-образными пластинами (или захватами V-образной формы) 22. Таким образом, при последующих циклах узлов 59 и 60 мальтийского механизма группа приборов перемещается в климатическую камеру 24. Длина транспортера 21 накопителя 20 и размеры климатической камеры 24 позволяют группе приборов достичь необходимой температуры и выдержать при ней заданное (необходимое) время. Когда транспортер 21 накопителя 20 по направляющим 23 подводит зажатую /-образными пластинами 22 группу приборов 3 на позицию захвата второго манипулятора 5, температурные исытания уже закончены. На позиции захвата манипулятора 5 захваты 22 V-образной формы ослабляют усилие прижима за счет того, что цепной трансформатор поворачивается по звездочке, и манипулятор 5, производя операции аналогично первому, переносит группу приборов с транспортера 21 накопителя 20 в контактный механизм 14, где происходит контактирование выводов групп приборов аналогично первому. После измерения контролируемых параметров в климатической камере 24 может произойти переход одного или нескольких приборов в низшую квалификационную группу (или брак). Переход в более высокую группу запрещается программой работы блока логики и схемно в блоке управления 45. Количество переходов в более низкую классификационную группу после испытаний в климатической камере подсчитывается и выводится на индикацию для статистического анализа с целью последующего совершенствования технологического процесса. Таким образом, после окончательного присвоения каждому прибору соответствующей классификационной группы по результатам двух измерений требуется операция раскладки их по этим классификационным группам, для чего необходимо их раздели т.е. отделить от соединяющих их перемычек (рис .9) . ИтаКу при следующем цикле манипу лятор 5 поднимается , поворачиваетс на 90 и опускается, при этом губки 7 и 8 захвата разжимаются и груп па приборов по лотку 38 направляетс в захват зажимного барабана 2б меха низма 25 отделения. Поворачиваясь на УсР , барабан вы водит группу приборов из зоны клима тической камеры 2, при этом подвиж ная губка 28 взаимодействует через рычаг 29 с кулаком 30 и зажимает группу приборов 3., Далее салазки Зб, на которых-нах дится набор дисковых фрез 31 на дер жавке 32 с электроприводом 33 и фи сирующая планка 37, взаимодействуют через рычаг 5В с кулаком 57 на валу 52 и совершают поступательное движе ние, при этом фиксирующая планка Зб своим прямоугольным окном, имеющим скосы, повторяющие профиль губок барабана 26, охватывает губки 33 че рез ременную З и зубчатую 35 передачи, фрезы 31 производят фрезерование перемычек, т.е. разделение группы приборов на отдельные приборы. При этом опилки отводятся по лотку в специальный ящик (не показан) . Когда салазки Зб возвращаются в исходное положение, зажимной барабан 26 снова поворачивается на 90°, и разделенные приборы поступают на позицию сортиро- вки, где подвижная губка 28 через рычаг 29взаимодействует с кулаком 30 и, разжимаясь,, освобождает приборы, которые под собственным весом, падают на направляющие лотки 40 и далее в шахты k механизма рассортировки 39, при этом происходит считывание скорректированной информации о классификационной принадлежности каждого полупроводникового прибора в регистр управления , выходы которого подключены к электромагнитам k3 сортировки 38. Электромагниты tk взаимодействуют с флажками 3, которые открывают путь приборам в необходимые ящики 2. Так как механизм рассортировки шахтного типа выполнен групповым, т.е. количество шахт выполнено по числу приборов, то сортировка (pac-j кладка по типам) производится одновременно для всех приборов, что позволяет резко увеличить производительность и повысить достоверность измерения электрических параметров. Для уменьшения 1исла электромагнитов управление осуществляется двоичным кодом номера классификационной группы Э типа, при этом число электромагнитов равно m-log n- , где m - число приборов в группе; п - число классификационных групп. Классификатор предложенной конструкции позволяет резко повысить про-, изводительность на контрольных операциях (в 4-5 раз) за счет использования группового контроля приборов, изготовленных прогрессивными групповым .методом. Введение дополнительного контактно-зажимного механизма позволяет контактировать группу приборов как в климатической камере, так и в нормальных условиях, что заменяет одну единицу оборудования. Введение механизма перемещения в виде двух засинхронизированных манипуляторов позволяет одновременно перемещать одну группу приборов из кассеты в контактный механизм 13, а другую из накопителя в контактный механизм k устройства для контактирования. Блок муфт позволяет проводить скольаящий режим работы устройств, что также, повышает производительность . Механизм отделения позволяет осуществлять контроль группы приборов одновременно и разделять их перед сортировкой,а не при изготовлении, что создает удобство обращения с приборами .
«ч|
S;.
пппплл
I
4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки полупроводниковых приборов | 1979 |
|
SU902110A1 |
| УСТРОЙСТВО ДЛЯ ПОДГОТОВКИ ИНТЕГРАЛЬНЫХ СХЕМ К МОНТАЖУ | 1991 |
|
RU2022499C1 |
| УСТРОЙСТВО ДЛЯ КЛИМАТИЧЕСКИХ ИСПЫТАНИЙ ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1991 |
|
RU2042295C1 |
| Установка для присоединения выводов полупроводниковых приборов | 1974 |
|
SU546961A1 |
| Устройство для термообработки радиодеталей | 1977 |
|
SU668112A1 |
| Устройство для сортировки полупроводниковых приборов | 1981 |
|
SU983834A1 |
| Устройство для сортировки радиодеталей по электрическим параметрам | 1981 |
|
SU1022226A1 |
| УСТАНОВКА ДЛЯ СЪЕМА ОГНЕУПОРНЫХ ИЗДЕЛИЙ | 1973 |
|
SU364445A1 |
| Установка для укладки кирпича на печные вагонетки | 1979 |
|
SU893554A1 |
| Устройство для контроля и рассортировки конденсаторов | 1979 |
|
SU959176A1 |
1 .УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ ПО ЭЛЕКТ- . РИЧЕСКИМ ПАРАМЕТРАМ преимущественно на групповом держателе, содержащее соединенные с приводом механизм загрузки, манипулятор, транспортер-накопитель, контактный механизм, электрически соединенные с измерительным блоком механизм отделения полупроводниковых приборов от группового держателя,и механи зм рассортировки с приемной тарой, отличающеес я тем, что, с целью повышения достоверности измерения электрических параметров и производительности в работе,.оно снабжено проходной климатической камерой и дополнительными манипулятором и контактным механизмом, причем транспортер-накопитель, дополнительный манипулятор и контактный механизм расположены в проходной климатической камере, а механизм отделения полупроводниковых приборов от группового держателя расположен между проходной климатической камерой и механизмом рассортировки и выполнен в виде барабана с зажимными губками для групповых держателей полупроводниковых приборов и дисковых фрез, закрепленных на салазках, кинематически соединенных с бара баном, при этом каждый контактный механизм кинематически соединен с одним из манипуляторов. 2. Устройство по п. 1, о т л и чающееся тем, что механизм отделения полупроводниковых приборов от группового держателя снабжен фиксатором зажимных губок;барабана, выполненным в виде закрепленной на can лазках подпружиненной планки с okном, имеющим форму профиля занммных губок.
uiiiiii
n n n n n n n П n
Г+ + 4- + + +Г
..ш11Щ1Л11Л 1Л11ЛПЛМ
i
У
K
rts
:s
to
CsSNFo
.
I
«o
и
«
NNN
Фиг. 6
