1
Изобретение относится к автоматам для перегрузки с многопознционных прессов огнеупорных и других изделий на вагонетки или поддоны.
Известная установка для съема огнеупорных изделий со стола многопозиционного пресса, содержащая раму, на которой смонтирован механизм съема и укладки изделий на Транспортер-накопитель, групповой захват, ме: аннзм разворота, тележку с приводом.
Целью изобретения является укладка на Т}.оанспортер различно ориентированных изделый в ряду.
достигается тем, что механиз.м разворота выполнен с возможностью взаимодействия с у--становленным на раме цевочным колесом, выполненным с нриводной собачкой, кинематическ и связанной с приводным барабаном тран :спортера-накопителя. Приводная собачка вып(,)лнена с возможностью .взаимодействия с блог кирующим рычажком, соединенным со штс JKOM электромагнита, кинематически связаь шого с концевым выключателем, установле; Н1НЫМ в зеве захвата.
1Лриводное цевочное колесо кинематически
связ ано с горизонтальным валом, вьшолненHbiKvi с установленными по спирали остановами,
С монтированный вдоль хода тележки переноса
группового захвата.
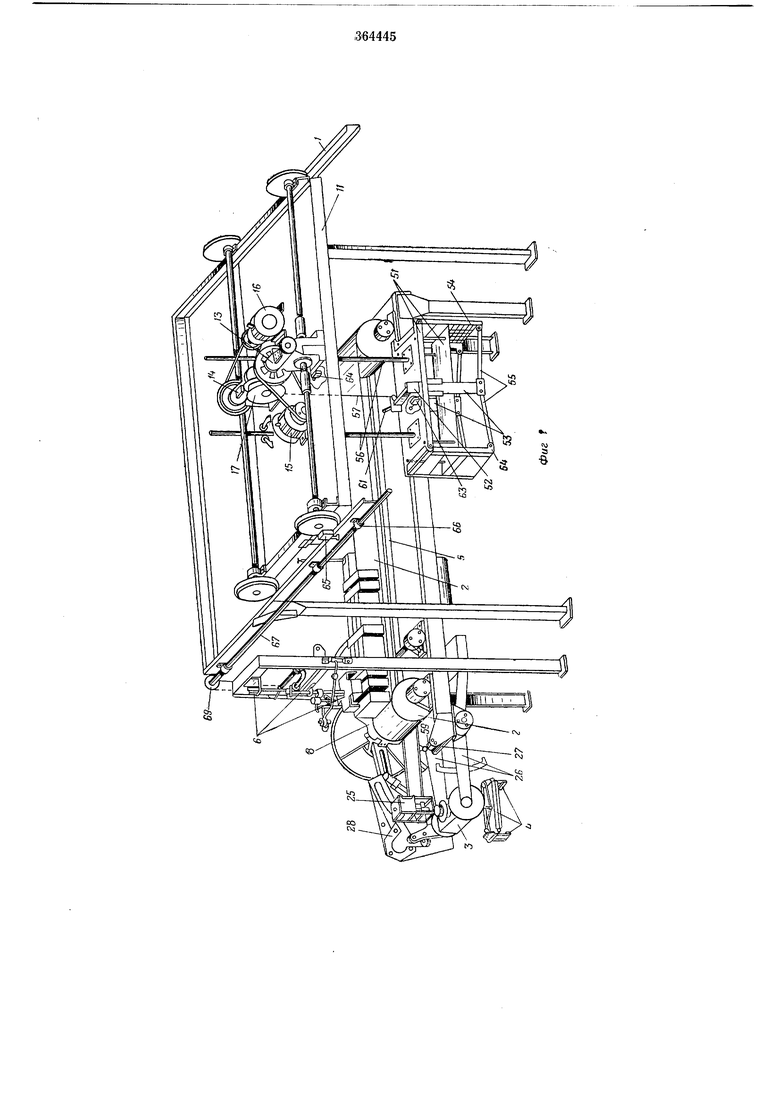
На фиг. 1 изображен описываемый автомат, общий вид; на фиг. 2 - то же, вид со стороны пресса; на фиг. 3 - цевочное колесо с прнводными рычагами, вид сбоку. Автомат содержит раму /, транспортер-накопитель 2, манипулятор 3 с захватом 4 для отбора и переноса кирпича со стола 5 пресса, механизм разворота 6, цевочное колесо 7, систему копиров 8, систему приводных рычагов
9 от вала пресса, электрощит 10 с размещенным в нем командоаппаратом, переносную тележку 11 с групповым захватом 12, для переноса рядов и укладки их в стопки на площадочные вагонетки, приводимую через редукторы 13, 14 электродвигателями 15 (передвижения) и 16 (опускания-подъема), лебедку 17. Захват для отбора и переноса кирпича от пресса включает рамку 18, на осях которой закреплены щарнирно зажимные щечки 19 с возможностью регулировки зева захвата регулировочными винтами 20, распорные рычаги 21, шток 22, пропущенный через вал 23 редуктора 24 манипулятора к электромагниту 25, укрепленному на валу редуктора манипулятора.
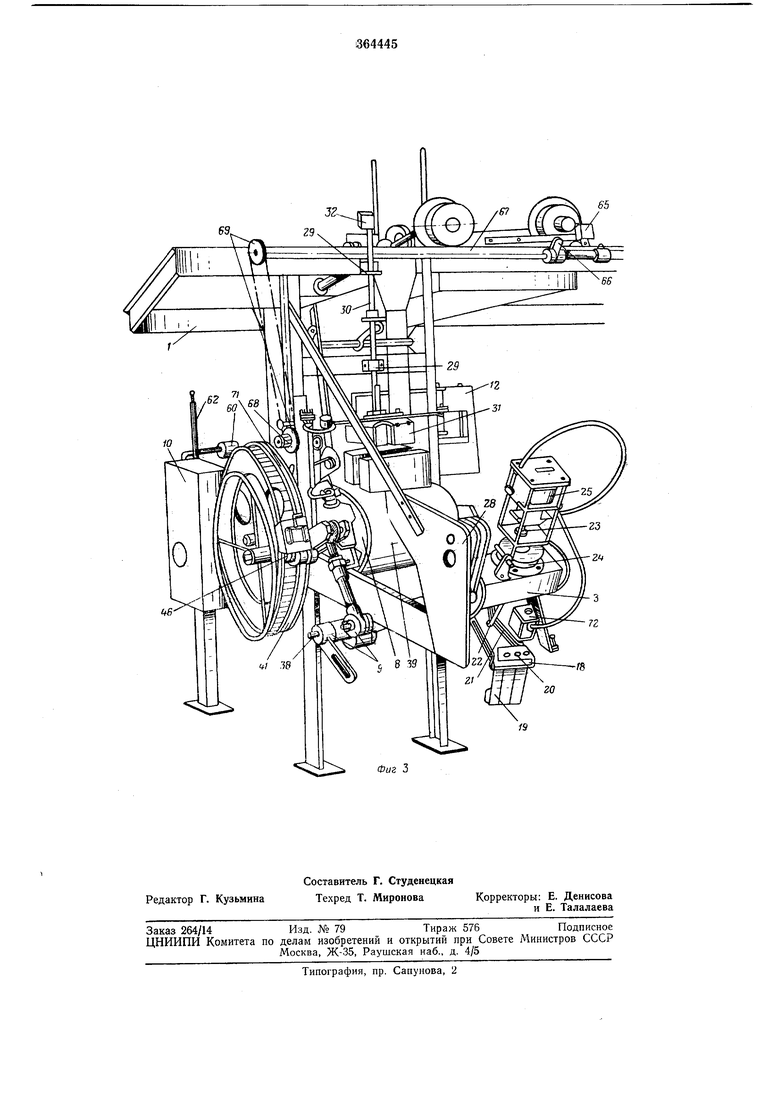
Весь манипулятор закреплен с помощью двух рычагов 26 на валу 27 жестко и находится в контакте с копиром механизма съема 28. Механнзм разворота над лентой транспортера-накопителя состоит из вертикально закрепленного в подщипниках 29 полого вала 30, к
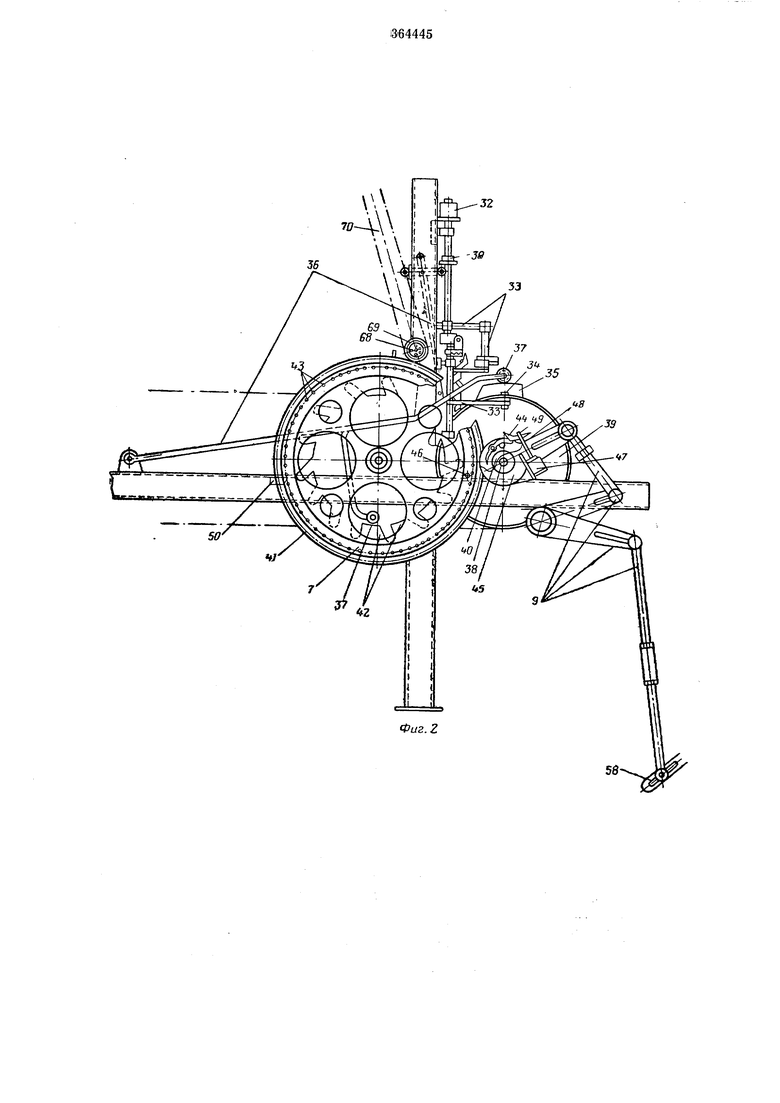
нижнему концу которого присоединен разворачивающий группу кирпичей щечный захват 31, а на верхнем конце - электромагнит 32, управляющий захватом в момент зажима одного или группы кирпичей. Кроме того, мехаггазм разворота содержит систему приводных рычагов 5J и возвратную пружину для разворота в горизонтальной плоскости, один из этих рычагов заканчивается роликом 34, движущимся по копиру 35 подъема механизма разворота, рычажной системы 36 с роликами 37 опускания и Подъема вала 30.
Транспортер-накопитель представляет собой обычный ленточный транспортер на валу 38 приводного барабана 39 которого жестко закреплена зубчатая шестерня 40, находящаяся в зацеплении с зубчатым колесом 41, на котором с Ъдной стороны закреплено цевочное колесо. С другой стороны зубчатого колеса жестко укреплен копир 42 опускания механизма разворота.
Шаг цевок 43 в каждом секторе различен или повторяется с соседним, в зависимости от программы формирования рядов, например, в первом секторе цевочного колеса шаг цевок постоянный.
Приводит в движение цевочное колесо подпружиненная собачка 44, укрепленная на оси в корпусе 45 рычага, посаженного на вал приводного барабана транспортера-накопителя в подшипниках. Имеется тормоз 46 цевочного колеса, электромагнит 47 холостого хода собачки €0 штоком 48 и рычажком 49, стопорная подпружиненная собачка 50 для строгой фиксации шага цевочного колеса.
Групповой захват состоит из неподвижной рамы 51, в направляющих которой ходит подвижная рама 52, заканчивающаяся внизу вертикальными тягами 53. К неподвижной раме 51 крепятся щеки 54 захвата, которые внизу соединены горизонтальными тягами 55 шарнирно с вертикальными тягами. Групповой захват подвешен в направляющих 56 на тросе 57 лебедки подъема и опускания.
Рычаг 58 выталкивающего вала пресса (на схеме не показан), совершает качающееся движение постоянного угла. Это движение и передается через систему приводных рычагов 9 на рычаг с корпусом 45, в котором укреплена собачка. Одновременно это же движение передается через рычаги 9 валу 27 манипулятора с укрепленным на нем захватом.
В момент, когда кирпич вытолкнут из формы стола пресса, манипулятор с захватом опускается в крайнее нижнее положение и нажимает на концевой выключатель 59 электромагнита 25, который зажимает кирпич в щеках захвата.
Этот электромагнит действует на распорные рычаги 21 через шток 22, пропущенный через вал редуктора 24 манипулятора.
При обратном движении приводных рычагов 9 манипулятор с захватом останавливается на требуемой высоте над лентой транспортера-накопителя, предварительно нажав концевой выключатель 59 электромагнита.
В мо.мент остановки манипулятора в верхнем положении электромагнит 25, обесточивается и разжимаются щечки захвата, а кирпич плавно опускается на ленту транспортеранакопителя на длинное ребро с необходимым зазором между соседним кирпичом. Во время этого хода манипулятора собачка
44 совершает рабочий ход и, захватив за цевку цевочного колеса, поворачивает его и зубчатое колесо 41 на строго определенный угол. Движение его через шестерню 40 передается валу 38 приводного барабана 39 транспортера-накопителя, который совершает один шаг. 11ри этом всякая инерция выбирается тормозом и фиксируется стопорной собачкой.
В это же время связанный через рычаги 9 и Зз механизм разворота 6 в ряду спускается в
заранее подготовленные программой зазоры между кирпичами. При этом ролик 37 попадает во впадину копира 42 опускания.
Щечный захват 31, захватив грунпу кирпичей, приподнимает их над лентой транспортера-накопителя и разворачивает на необходимый угол, например 90. При следующем холостом ходе манипулятора щечный захват укладывает на транспортер-накопитель развернутую группу кирпича и возвращается в исходное положение.
Пабранный ряд кирпича, движимый лентой транспортера-накопителя, нажимает на концевой выключатель 60, а групповой захват 12,
находящийся в исходном положении над этим рядом, кирпичей получив импульс от командоаппарата в электрошкафе, опускается с помощью лебедки Г/ в зазоры между кирпичами на ленте. Во время этого движения неподвижная
рама 51 опускается на кирпичи ряда, при этом фиксатор 67 положения щек 54 освобождается с помощью упора 62, а подвижная рама 62 продолжает передвигаться в крайнее положение и нажимает на концевой выключатель 63.
Последний дает импульс командоаппарату нга включение обратного хода лебедки 17.
Подвижная ра.ма группового захвата 12 ВО время подъема снимает щеками 54 через Bei Jтикальные тяги 53 кирпич.
С зажатым рядом кирпичей групповой г захват продолжает передвигаться вверх до у пора в концевой выключатель 64, который о: станавливает электродвигатель 16 подъема и дает импульс через командоаппарат в элек грошкафу на включение электродвигателя 15 передвижения переносной тележки 11. Посл едняя передвигается до упора концевым выкл ючателем 65, расположенным над ней, в oci aнов 66 горизонтального вала 67, этот вал пр )иводится в движение от малого цевочного кс леса 68 через звездочки 69, цепью 70 после ок ончания формирования стопки, например, из рядов. Колесо 68 проворачивается выступом 71 на зубчатом колесе 41.
После остановки переносной тележки // групповой захват 12 опускается на площадку вагонетки (на схеме не показана), и при упоре неподвижной рамы зажатым рядом кирпича в площадку или в нижележащий ряд срабатывает концевой .выключатель 63. При этом подвижная рама захвата освобождает фиксатор 62 положения, оставив в раскрытом положении щеки захвата 12.
После этих операций командоаппарат в электрошкафу включает возврат тележки с групповым захватом в исходное положение над лентой транспортера-накопителя.
Для сохранения заданной технологическим процессом программы укладки кирпича в ряд на транспортере-накопителе, в случае разрушения или пропуска изделия прессом, припгеняется блокирующий собачку 44 рычажок 49, который связан со штоком 48 электромагнита 47, получающего импульс от концевого выключателя 72, поставленного в зеве захвата 4. Импульс от этого концевого выключателя передается на электромагнит 47, отключающий собачку привода цевочного колеса. Следовательно, при пропуске одного или нескольких изделий собачка делает холостые качания, а транспортер-накопитель остается неподвижным до подхода полноценного кирпича.
Предмет изобретения
1.Установка для съема огнеупорных изделий со стола многонозиционного пресса и укладки их в стопки, содержащая раму, на которой смонтирован механизм съема и укладки изделий на транспортер-накопитель, групповой захват, механизм разворота, тележку с приводом, отличающаяся тем, что, с целью укладки
на транспортер различно ориентированных изделий в ряду, механизм разворота выполнен с возможностью взаимодействия с установленным на раме цевочным колесом, выполненным с приводной собачкой,кинематически связанной с приводным барабаном транспортеранакопителя.
2.Установка по п. 1, от./ иающаяся тем, что приводная собачка выполнена с возможностью взаимодействия с блокируюнд;им рычажком,
соединенным со штоком электромагнита, кинематически связанного с концевым выключателем, установленным в зеве захвата.
3.Установка по пп. 1, 2, отличающаяся тем, что, с целью обеспечения необходимых зазоров между выкладываемыми стопками и уменьшения габаритов установки, приводное цевочное колесо кинематически связано с горизонтальным валом, выполненным с установленными по спирали остановами и смонтированный вдоль хода тележки переноса группового захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для многопакетной садки керамических изделий на печную вагонетку | 1983 |
|
SU1131656A1 |
| Автомат-укладчик плит | 1983 |
|
SU1138330A1 |
| ПАТЕНТВС-ТЕХШ-ЧЕОКАЯ. .RHbisHnTFHA | 1970 |
|
SU285563A1 |
| Агрегат для брикетирования штучных изделий | 1976 |
|
SU653136A1 |
| Устройство для многостолбиковой укладки кирпича-сырца | 1978 |
|
SU770801A1 |
| АВТОМАТ-УКЛАДЧИК КИРПИЧА-СЫРЦА НА ПЕЧНУЮВАГОНЕТКУ | 1971 |
|
SU295730A1 |
| УСТАНОВКА ДЛЯ ПЕРЕГРУЗКИ СИЛИКАТНОГО КИРПИЧА С ПРЕССА НА ПРОПАРОЧНЫЕ ВАГОНЕТКИ | 1967 |
|
SU195940A1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |
| УКЛАДЧИК КИРПИЧА НА ПЕЧНЫЕ ВАГОНЕТКИ | 1973 |
|
SU375193A1 |
| Устройство для формования слоя кирпичей | 1978 |
|
SU745696A1 |