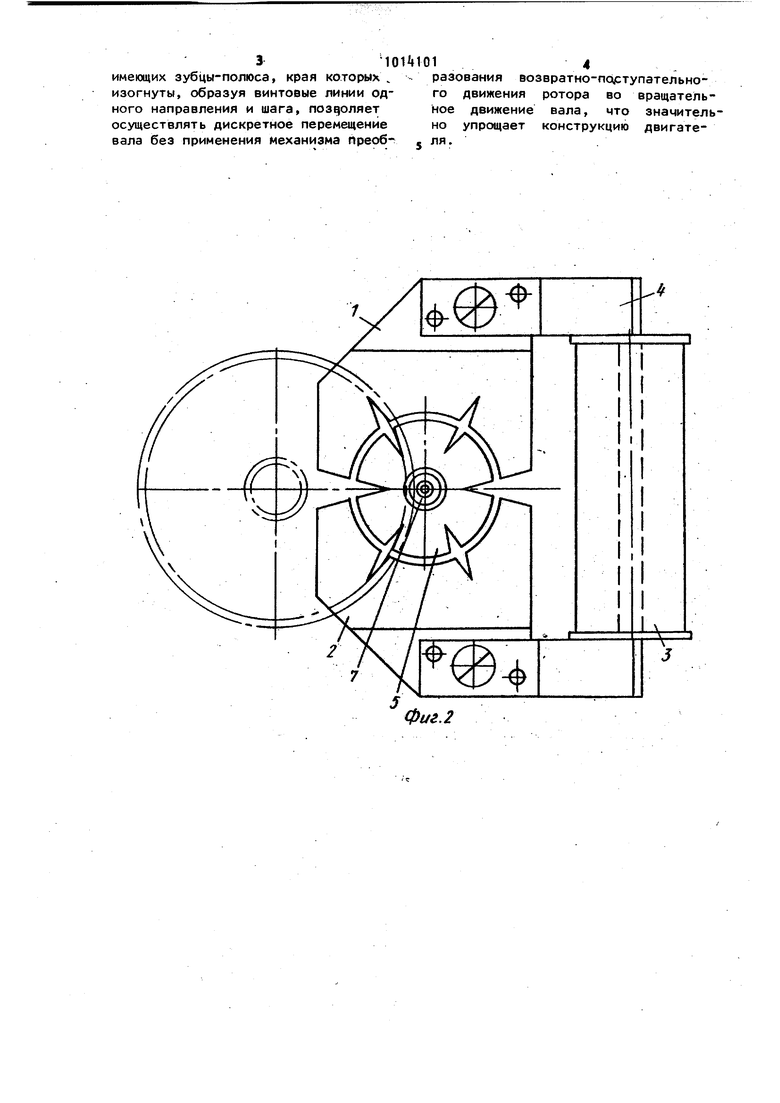
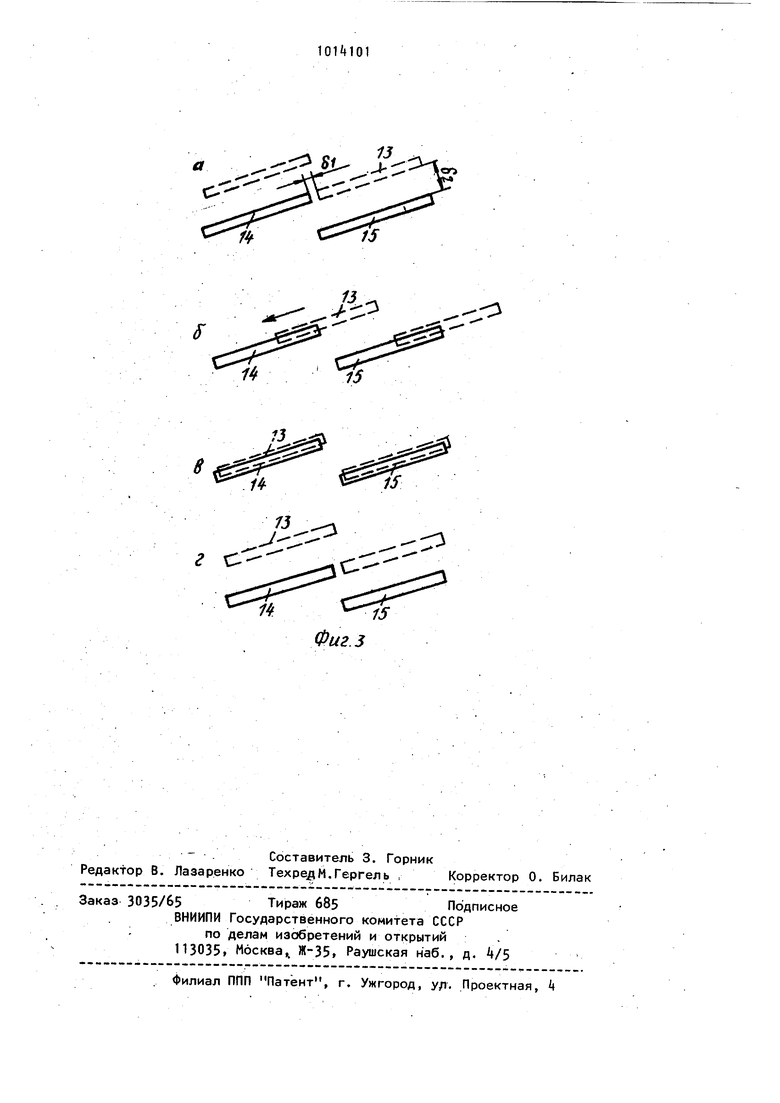
f1 Изобретение относится к электротехнике, в частности к шаговым электродвигателям, которые применяются в устройствах автоматики. Известен однофазный электромагнит ный шаговый двигатель, который для обеспечения дискретного вращательного движения выходного вала, пропорционального электрическим импульсам содержитобмотку, движущуюся в магнитном поле и приводящую в движение с помощью собачки храповое колесо, возвращающееся в исходное положение с помощью пружины или гибкой мембраны ,1 . Однако указанный двигатель конструктивно сложен. Наиболее близким по технической сущности к предлагаемому является электромагнитный шаговый двигатель, содержащий статор с обмоткой управле ния и якорь, взаимодействующий с возвратной пружиной 2 . . Двигатель имеет также механизм преобразования возвратно-поступатель ного движения якоря во вращательное движение выходного вала, выполненный в виде жестко связанного с якорем цилиндра, на наружной поверхности которого имеются винтовые канавки, по которым перемещаются шарики, расположенные в гнездах второго цилиндр .Однако наличие в известном двигат ле описанного механизма преобразования возвратно-поступательного движения якоря в дискретное вращательное движение выходного вала значительно усложняет его конструкцию. Цель изобретения - упрощение конструкции. Поставленная цель достигается тем, что в однофазном электромагнитном шагововм двигателе, содержащем статор с обмоткой управления и якор взаимодействующий с возвратной пружиной, статор и якорь снабжены зубцами-полюсами, края которых изогнуты образуя многозаходные винтовые линии одного направления и шага. Такое решение позволяет существе но упростить конструкцию двигателя, исключив сложный механизм преобразования возвратно-поступательного движения якоря во вращательное. На фиг., 1 изображен предлагаемый |Двнгат.ель, продольный разрез; на фиг. 2 - то же, вид сверху; на фиг. 3 О (с8,г поясняется работа двигателя. . . . 12 Двигатель (фиг. 1 )имеет статор из магнитно-мягкого материала, снабженный зубцами-полюсами и выполненный, в виде двух частей 1 и 2, а также обмотку управления 3 на ярме Д. Внутри статора расположен зубчатый якорь 5, жестко закрепленный на оси 6, имевщей удлиненные цапфы. Триб 7 оси 6 взаимодействует, с зубчатым колесом 8,поджатым упругой изогнутой шайбой 9.Снизу якорь 5 поджат плоской пружиной 10. На якоре 5 и частях статора 1 и 2 края зубцов-полюсов изогнуты так, что образуют многозаходные . винтовые линии одного направления и шага. Якорь 5 с осью 6 вращается и совершает возвратно-поступательные движения в опорах скольжения платы 11 и моста 12. Двигатель работает следующим образом. При обесточенной обмотке управления 3 якорь 5 под действием возвратной пружины 10 находится в верхнем крайнем положении. Зубцы-полюса якоря 5 находятся над зубцами-полюсами частей статора 1 и 2 (фиг. Зо)-В таком положении магнитная проводимость зазоров 6 больше магнитной проводимости зазоров d и при подаче импульса в обмотку управления полюс 13 якоря 5 подтянется к полюсу 14, а не к полюсу 15 статора. Ротор 5 при этом совершит винтовое движение вниз и влево (как показано стрелкой .на фиг. 36) Такое движение продолжится до полного совмещения зубцовполюсов ратора $ с зубцами-полюсами частей статора 1 и 2 (фиг. З-ё)По окончании действия импульса электромагнитное взаимодействие между якорем и статором прекратится, якорь 5 под действием возвратной пружины 10 переместится в крайнее верхнее положение (фиг. 32.)- В результате всего цикла якорь 5 повернется на один шаг влево. Для улучшения помехоз:ащищенности двигателя от случайных ударов на оси зубчатого колеса 8 установлена . упругая изогнутая шайба 9, создающая фрикционный момент, улучшающий фиксацию якоря при обесточенной обмотке. Таким образом, последовательная подача однополярных управляющих импульсов, обеспечивает дискретное перемещение якоря на шаг. Использование в шаговом электрсмагнитном-двигателе якоря и статора.
имеющих зубЦы-полюса, края которых , изогнуты, образуя винтовые линии одного направления и шага, позволяет осуществлять дискретное перемещение вала без применения механизма преоб
разования возвратно-псу:тупательного движения ротора во вращательное движение вала, что значительно упрощает конструкцию двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| Устройство с колебательно-вращательнымдВижЕНиЕМ | 1979 |
|
SU832658A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006144C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2231897C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ОДНОФАЗНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030068C1 |
| Шаговый электродвигатель | 1986 |
|
SU1817204A1 |
| Электромагнитный шаговый двигатель | 1981 |
|
SU987754A1 |
| Шаговый электродвигатель | 1981 |
|
SU989696A1 |
| Электромагнитный шаговой двигатель | 1976 |
|
SU548925A2 |
ОДНОФАЗНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ, содержащий статор с обмоткой управления и якорь, взаимодействущий с возвратной пружиной, о т л и ч а ю 1Д и и с я тем, что, с целью упрощения конструкции, статор и якорь снабжены зубцами-полюса.;ми, края которых изогнуты, образуя :многозаходные винтовые линии одного направления и шага.. п
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ДЕТЕКТОР АБСОЛЮТНОЙ ВЕЛИЧИНЫ СИГНАЛА | 2000 |
|
RU2210855C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электромагнитный шаговый двигатель | 1974 |
|
SU504277A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
