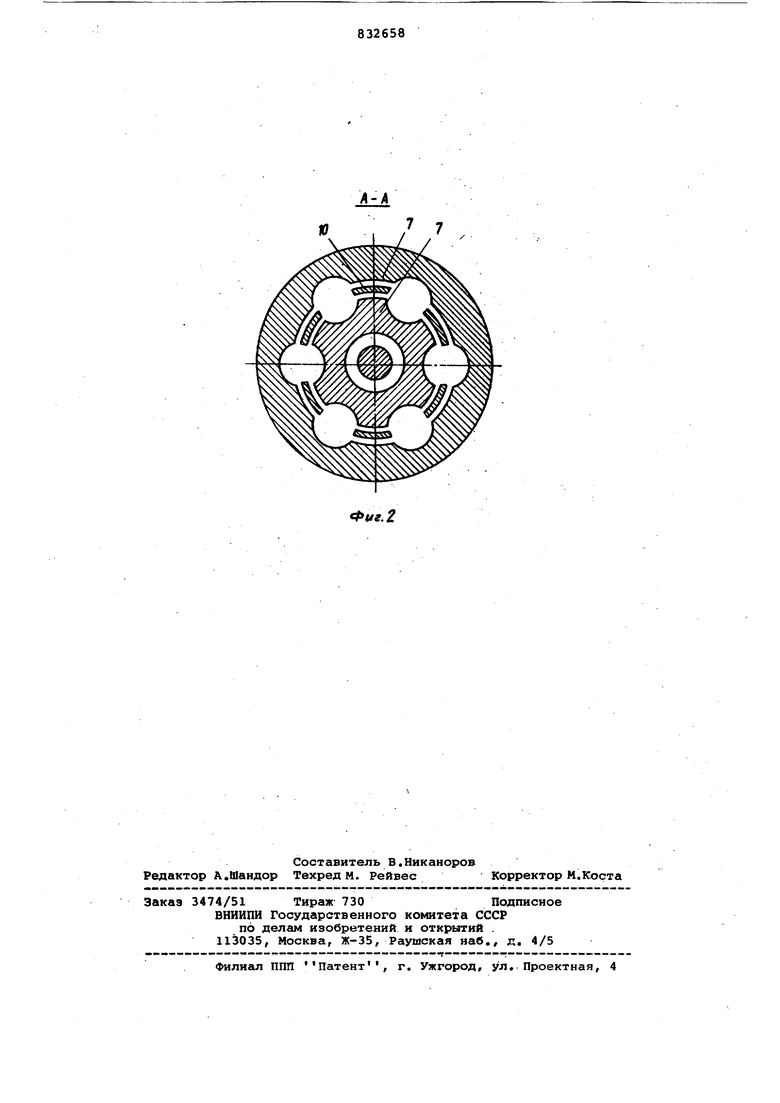
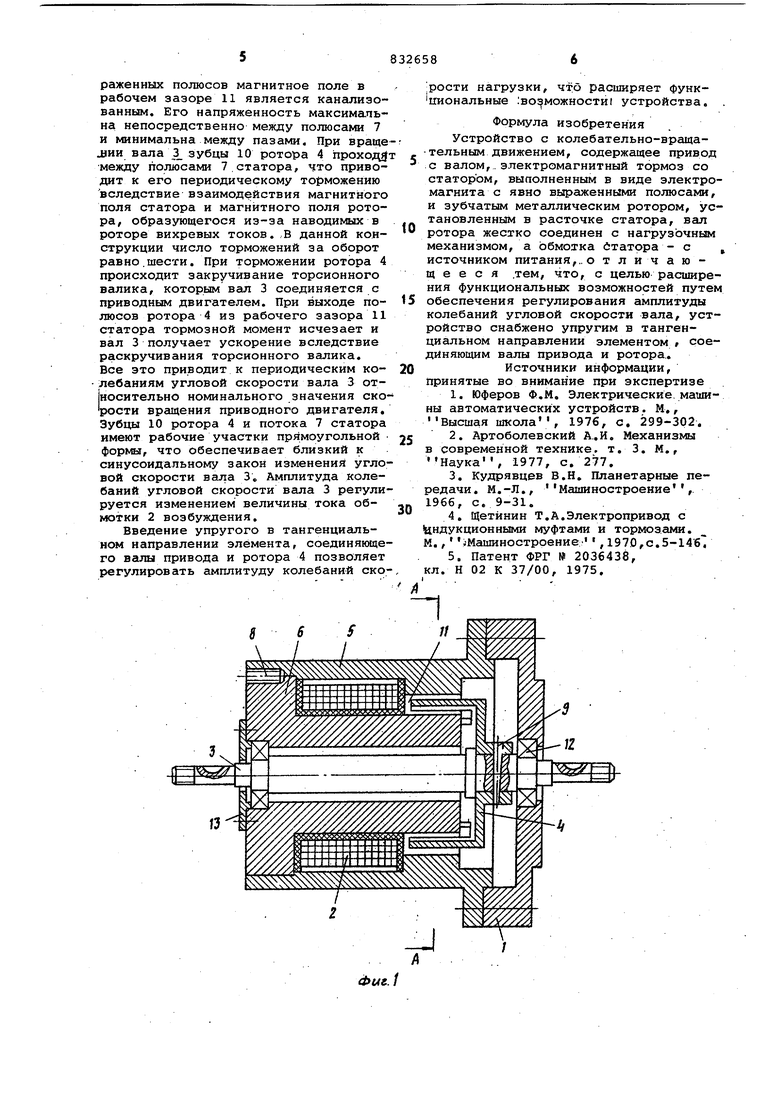
Изобретение относится к устройст вам для преобразования одного вида вращательного движения в другой, а более конкретно к устройствам для периодического изменения угловой ок рости вращения, для получения колебательно-вращательного движения. Известны храповые механиз№1 для преобразования возвратно-вращательного движения в прерывисто-вращател ное в одном направлении fl. Однако подобным механизмам для работы требуется источник возвратно вращательного движения, например электромагнит и подвижный, периодически протягиваемый к нему якорь, связанный с собачками храпового мех низма. Такие параметры движения хра пового колеса как угловая скорость и ускорение однозначно связаны с конструктивными параметрами механиз ма и скоростью возвратно-вращательйр го движения. Регулирование амплитуды колебаний угловой скорости при постоянном среднем ее значении здес принципиально невозможно. Известны мальтийские механизмы мальтийские кресты, которые приме няются для преобразования непрерывного вращения в прерывистое в том случае, когда требуются периодические остановки в движении Г21 Однако движение ведомого звена (креста) полностью определяется движением ведущего (кривошипа) и при равномерном его вращении управление колебаниями угловой скорости ведомого звена невозможно. Известны дифференциальные механизмы, позволяющие получить результирующие движений как сумму иця разность составлянхцих движений. ; d . помощью таких механизмов шаговое вращательное движение получается при сложении двух движений: равномерного вращения и неравномерного, периодического, которое осуществляется с помощью более простого механизма,например кривошипного, мальтийского и т.п. Так как оба эти движения являются независимыми., в дифференциальном механизме возможно регулирование по амплитуде колебаний угловой скорости при различных средних ее значениях З . Недостатком такого механизма является его громоздкость, так как. для получения неравномерного вращения с изменяемыми параметрами здесь требуется также неравномерное вращение . Известны шаговые или импульсные электродвигатели, в которых импульсы тока, подаваемые в обмотки возбуж дения статора, преобразуются в дискретные угловые перемещения, или шаги ротора. Импульсы тока подаются от ис точника электроэнергии через комму-j татор. Скорость вращения ротора зави (Сит от частоты следования импульсов, а амплитуда колебаний угловой скорос ти однозначно определяется ее величиной и конструктивными параметрами ротора и присоединенных элементов. Известно устройство с приводом и индукционным тормозом, состоящим из металлического ротора, вращающегося в магнитном поле статора J4. Торможение здесь осуществляется благодаря возникновению момента от взаимодействия магнитного поля статора с магнитным полем ротора, которое появляется вследствие наводимых в роторе при его вращении вихревых токов. В индукционном тормозе регулировка амплитуды колебаний угловой скорости вала в некоторых пределах принципиально возможна, для чего необходимо соответствующим образом изменять напряженность магнитного поля статора. При выполнении статора в виде электромагнита это требует специальной программы изменения тока в обмотке возбуждения. Получение дискретного (шагового) вращательного движения в индукционном тормозе невозможно ввиду отсутствия в нем какого-либо устройства для фиксации ротора при определенных углах поворота . Наиболее близким к предлагаемому является устройство с колебательновращательным движением, содержащее привод с валом, электромагнитный тормоз со статором, выполненным в ви де электромагнита с явно вырг1женным полюсами, и зубчатым металлическим ротором, установленным в расточке статора, вал ротора жестко соединен с нагрузочным механизмом, а обмотка статора - с источником питания Sj. Однако в проточке вал привода жестко связан с валом ротора тормоза. Наличие такой жесткой связи не позволяет добиться регулирования ам плитуды колебаний (в широких пределах) , угловой скорости ротора. Для регулирования амплитуды коле баний угловой скорости требуется до таточно мощная магнитная система ус ройства (чем больше амплитуда, тем мощнее система), а для сохранения вращения вала и преодоления останав ваемого тормозного момента требуетс более мощный приводной двигатель,ил двигатель с редуктором, что, в коне ном счете, связано с увеличением пр веденного момента инерции ротора ус ройства, что ведет кустановке на вал дополнительного маховика. Это приводит к сглаживанию колебаний угловой скорости вала устройства. Цель изобретения - расширение функциональных возможностей устройства путем обеспечения регулирования амплитуды колебаний угловой скорости вала. Поставленная цель достигается тем,г что устройство снабжено упругим в тангенциальном направлении элементом, соединяющим валы привода и ротора. На фиг. 1 - изображен вариант устройства, сечение; на фиг. 2 - разрез А-А на фиг. 1. Устройство содержит привод и электромагнитный тормоз с корпусом, фланцем 1, статором с расположенными внутри обмоткой 2 возбуждения и валом 3 с закрепленным на нем ротором 4. Статор образован обоймой 5. и установленным в ней сердечником 6, выполненным из магнитомягкого материала, фланец 1 - из немагнитного материала. Сердечник 6 и обойма 5 имеют явно выраженные полюса 7, и сердечник 6 установлен в обойме 5 так, что полюса 7 расположены друг против друга. Такое ИХ. относительное положение зафиксировано установочным винтом 8. Ротор 4 закреплен на валу 3 с помощью конического штифта 9. Выборки по периферии ротора образуют зубцы 10, число которых в данном случае соответствует числу пар полюсов 7 статора и равно шести. Зубцы 10 ротора 4 и полюса 7 статора имеют здесь рабочие участки прямоугольной формы В зависимости от конкретных требований, предъявляемых к устройству, выборкиротора 4 могут быть заполнены материалом, отличающимся по магнитной . проницаемости от материала ротора 4, например диэлектриком. Это позволяет сохранить 1геометрическую1 форму ротора 4 при фактическом наличии выборок. Зубцы 10 ротора 4 располагаются в рабочем зазоре 11 между полюсами 7 статора. Вал 3 установлен в корпусе с помощью шарикоподшипников 12, один из которых расположен во фланце, 1, а другой - в сердечнике б и закреплен с помощью шайбы 13. Оба выхода вала 3 имеют шпоночные пазы и резьбу, один из концов вала 3 соединяется жестко с нагрузкой, а другой - посредством упругого в тангенциальном направлении элемента с валом привада. Устройство работает следующим образом. Вал 3 приводится во вращение от привода с которым он соединяется с помощью упругого элемента, например торсионным валиком. На обмотку 2 возбуждения подается ток от регулируе-. мого источника питания, а между полюсами 7 статора образуется магнитнов поле. Вследствие наличия явно выраженных полюсов магнитное поле в рабочем зазоре 11 является канализованнЕЛМ. Его напряженность максимапьна непосредственно между полюсами 7 и минимальна между пазами. При враще ЛИИ вала 3 зубцы 10 ротора 4 проходи между полюсами 7 статора, что приводит к его периодическому торможению вследствие взаимодействия магнитного поля статора и магнитного поля ротора, образующегося из-за наводимых в роторе вихревых токов. В данной конструкции число торможений за оборот равно.шести. При торможении ротора 4 происходит закручивание торсионного валика, которым вал 3 соединяется с приводным двигателем. При выходе полюсов ротора 4 из рабочего зазора 11 статора тормозной момент исчезает и вал 3 получает ускорение вследствие раскручивания торсионного валика. Все это приводит к периодическим колебаниям угловой скорости вала 3 от|носительно номинального значения скорости вращения приводного двигателя. Зубцы 10 ротора 4 и потока 7 статора имеют рабочие участки прямоугольной формы, что обеспечивает близкий к синусоидальному закон изменения угловой скорости вала 3. Амплитуда колебаний угловой скорости Всша 3 регулируется изменением величины тока обмотки 2 возбуждения. Введение упругого в тангенциальном направлении элемента, соединяющего валы привода и ротора 4 позволяет регулировать амплитуду колебаний скоct ue.f рости нагрузки, что расширяет функциональные :во можности1 устройства. Формула изобретения Устройство с колебательно-вращательным движением, содержащее привод с валом,.электромагнитный тормоз со статором, выполненным в виде электромагнита с явно выраженными полюсами, и зубчатым металлическим ротором, установленным в расточке статора, вал ротора жестко соединен с нагрузочным механизмом, а обмотка бтатрра - с источником питания,., о т л и ч а ю щ е е с я .тем, что, с целью расширения функциональных возможностей путем обеспечения регулирования амплитуды колебаний угловой скорости вала, устройство снабжено упругим в тангенциальном направлении элементом , соединяющим валы привода и ротора.. Источники информации, принятые во внимание при экспертизе 1.Юферов Ф.М. Электрические, машины автоматических устройств, М., Высшая школа , 1976, с, 299-302. 2.Артоболевский А..И. Механизмы в современной технике, т. 3. М., Наука, 1977, с. 217. 3.Кудрявцев В.Н. Планетарные пеедачи. М.-Л., Машиностроение, 1966, с. 9-31. 4.Щетинин Т.А.Электропривод с 1ндукционными муфтами и тормозами. ., Машиностроение , 1970,с.5-14б 5.Патент ФРГ № 2036438, л. Н 02 К 37/00, 1975. J
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИБРАТОР | 2005 |
|
RU2292960C2 |
| Устройство для экспериментальных исследований гидравлических движителей | 1988 |
|
SU1615589A1 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| ЭЛЕКТРОРЕЗОНАНСНЫЙ ПРИВОД | 2005 |
|
RU2310264C2 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |
| Бесконтактная индукционная муфта-тормоз | 1981 |
|
SU995223A1 |
| Тихоходный вентильный двигатель индукторного типа со встроенным магнитным редуктором | 2021 |
|
RU2787007C1 |