(54) ЭЛЕКТРОМАГНИТНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ

| название | год | авторы | номер документа |
|---|---|---|---|
| Однофазный электромагнитный шаговый двигатель | 1978 |
|
SU712906A1 |
| Однофазный электромагнитный шаговый двигатель | 1981 |
|
SU1014101A1 |
| Электромагнитный шаговой двигатель | 1976 |
|
SU548925A2 |
| Устройство преобразования качательного движения в одностороннее вращательное путем реализации заданного алгоритма подачи управляющих импульсов | 2024 |
|
RU2837540C1 |
| Электромагнитный шаговый двигатель | 1977 |
|
SU731522A1 |
| Электромагнитный шаговый двигатель | 1972 |
|
SU452899A2 |
| Шаговый двигатель | 1974 |
|
SU495746A1 |
| Шаговый электродвигатель | 1979 |
|
SU860228A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2005 |
|
RU2307419C2 |
| Шаговый искатель с общим струнным полем | 1940 |
|
SU59038A1 |
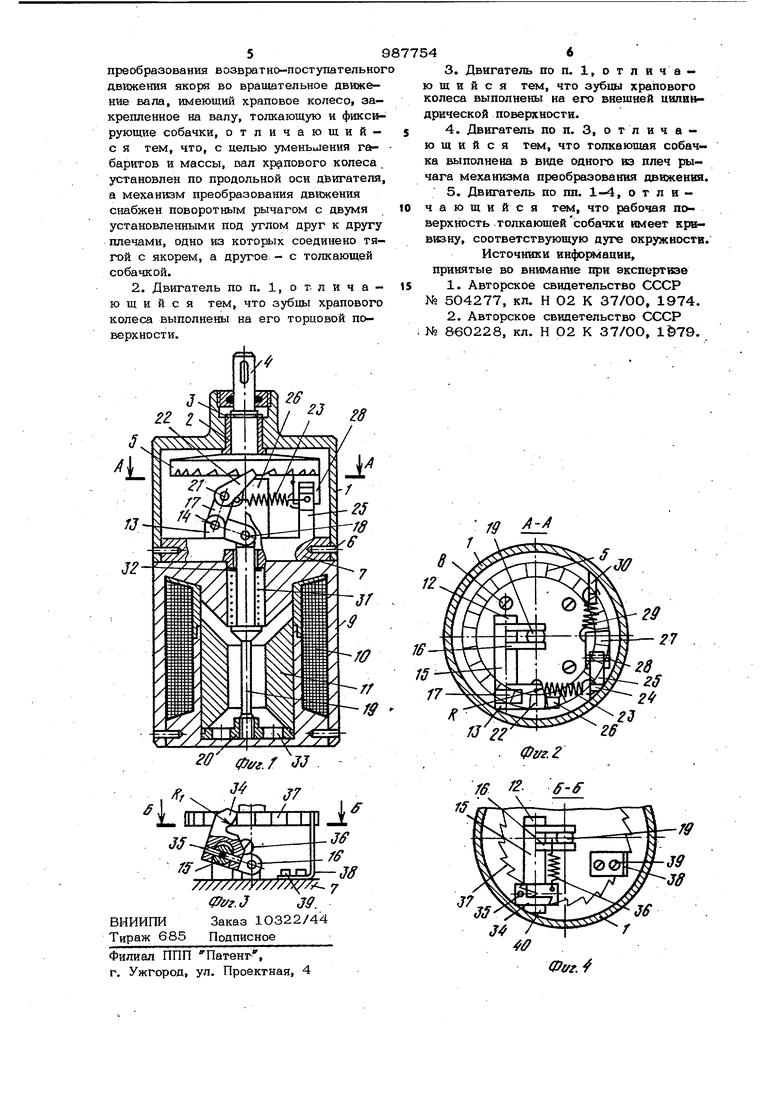
Изобретение относится к электротехнике, в частности к шаговым электродви гатепям, которые находят широкое приме нение в дискретном электроприводе. Известны электромагнитные шаговые двигатели, которые содержат статор с магнвтопроводом и обмоткой управления и подввжгный якорь. Поступательное движение якоря в известном двигателе преобразуется во вращательное движение вала двигателя сложным механизмом, включающим цилиндры со спиральными канавками, шарики, храповые колеса и собачки 1 . Помимо сложности конструкции этот двигатель имеет еще пониженную надежность и увеличенные габариты. Наиболее близким по своей технической сущности к предлагаемому является электромагнитный шаговый двигатель, со держащий статор с магнитопроводом, обмоткой управления, якорь, установленный по .продольной оси двигателя, возвратную пружину и механизм преобразования возвратно-поступательного движения яко-. ря во вращательное движение вала, имеющий храповое колесо, закрепленное аа валу, толкающую и фиксирующие собачки С 2 . Однако иэ-за взаимно перпендикуляр ного расположения осей двигателя и вала известный двигатель имеет пошяшенные габариты и массу. Цель - уменьшение габаритов н массы. Поставленная цель достигается тем, что в двигателе вал храпового колеса установлен по продольной оси двигателя, а механизм преобразования движения снаб жен поворотным рычагом с двумя установленными под углом друг к другу плечами, одно из которых соединено тягрй с якорем, а другое - с толкающей собачкой. Целесообразно в этом двигателе зубцы храпового колеса выполнять на его либо торцовой, либо внешней поверхности, а также толкающую собычку выполнять в виде одного из плеч рычага механизма преобразования движения. Улучшению работы двигателя будет способствовать и выполнение рабочей поверхности толкающей собачки с кривиз ной, соответствующей дуге окружности. На фиг, 1 изображен двигатель, продопьяый разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 и 4 приведен эле« мент конструкции двигателя, у которого одно КЗ плеч рычага выполняет функцию толкающей собачки. Двигатель содержит корпус 1, в котором посредством подшипниковой втулки 2 и пружинной шайбы 3 CDOCHO установлен выходной вал 4 с жесгкоустайовлениым на нем или выполненным за одно целое храповым колесом 5.. К корпусу 1 винтами 6 крепится основание 7, сочлененное винтами 8 с магнитопроводом 9, внутри которого установлены катушка 10 и подвижный якорь 11, ось которого совпадает с продольной освю двигателя. На основании 7 имеются проушшы 12 и 13, в которых на, оси 14 подвижно закреплен рычаг 15с дьумя плечами 16 и 17, жестко соединенными между собой и расположенными под углом друг к другу. Плечо 16 через шарнир 18 соединено с тягой 19, несущей на другом конце опорную шайбу 20 с закрепленным на ней шпорам 11. Плечо 17 через шарнир 21 соединено с тол кающей собачкой 22, рабочая поверхност которой выполне ш с кривизной (R или R обеспечивающей увеличение площади этой поверхности в процессе двинсения. Пружи на 23 предназначена для осуществления надежного контакта собачки 22 с зубцами храпового колеса 5. Эта пружина закреплена в ушке 24, имеющемся на кронштейне 25, жестко соединенном с основанием 7. Для ограничения движения собачки 22 на этом же основании выпол нен упор 26. Фиксация положения вала осуществля,ется стопорной собачкой 27, установленной на оси 28 и. взаимодействующей с пружиной 29, закрепленной одним своим концом в ушке ЗО.. На тяге 19 устаноелe ш возвратная пружина 31, упирающаяся одним концом в уступ тяги 19, а другим - в шайбу 32. В шайбе 20 предусмотрен ряд отверс тий 33, равномерно расположенных по окру сности. На фиг. 3 и 4, представляющих вариант двигателя с расположением зубдов храпового колеса на его наружной цилиндрической поверхности, одно из плеч рычага 15 выполнено в виде собачки 34 ПОДВИЖНО установленной на нем благодаря полуосям 35 и поджимаемой пружиной 36 к зубцам 37 храпового колеса. Роль фиксатора в этом случае выполйяет пластинчатая прунсина 38, на одном конце прикрепленная винтами 39 к основанию 7, а другим своим концом взаимодействующая с зубцами 37 храпового колеса. Для ограничения движения собачки 34 предусмотрен упор. 40, жестко связанный с основанием 7. Двигатель работает следующим образом. При подаче импульса электрического тока в катушку 1О якорь 11 притягивается к стопу магнитопровода 9 и через тягу 19, снсимая пружину 31, поворачивает рычаг 15, Олагодаря чему соЬачка 22 перескакивает через один зубец храпового колеса 5, удерживаемого стопорной собачкой 27. После прохождения и Iпульса тока упомянутая кинематическая цепь под- действием пружины 31 возвращается в исходное положение, при этом собачка 22 толкает зубец 37 храпового колеса и перемещает вал двигателя на один шаг. При взаимодействии с зубцом 37 рабочая поверхность собачки 22, благодаря кривизне рабочей поверхности, плавно перемещается по контактируемой с ней грани зубца 37, обеспечивая тем самым благоприятные условия работы механизма в зоне контакта. Рабочий ход собачки 22 ограничен упором 26, который исключает поворот собачки 22, а следовательно, и храпового колеса 5 в , направлении вращения двигателя под действием случайных моментов в этом направлении. Поворот в обратном направлении блокируется стопорной собачкой 27. С подачей следующего импульса электрического TOJia цикл начнет повторяться. Благодаря установке вала в предлагаемом двигателе по его продольной оси и выполнению механизма преобразования с поворотным двуплечным рычагом, двигатель приобрел компактность, которая позволяет уменьшить его габариты и массу. Формула изобретения 1. Электромагнитный шаговый двйгатeлЬj содержащий статор с магнитопроводсвд и обмоткой управления, якорь, установленный по продольной оси двига- | теля, возвратную пружину и механизм
