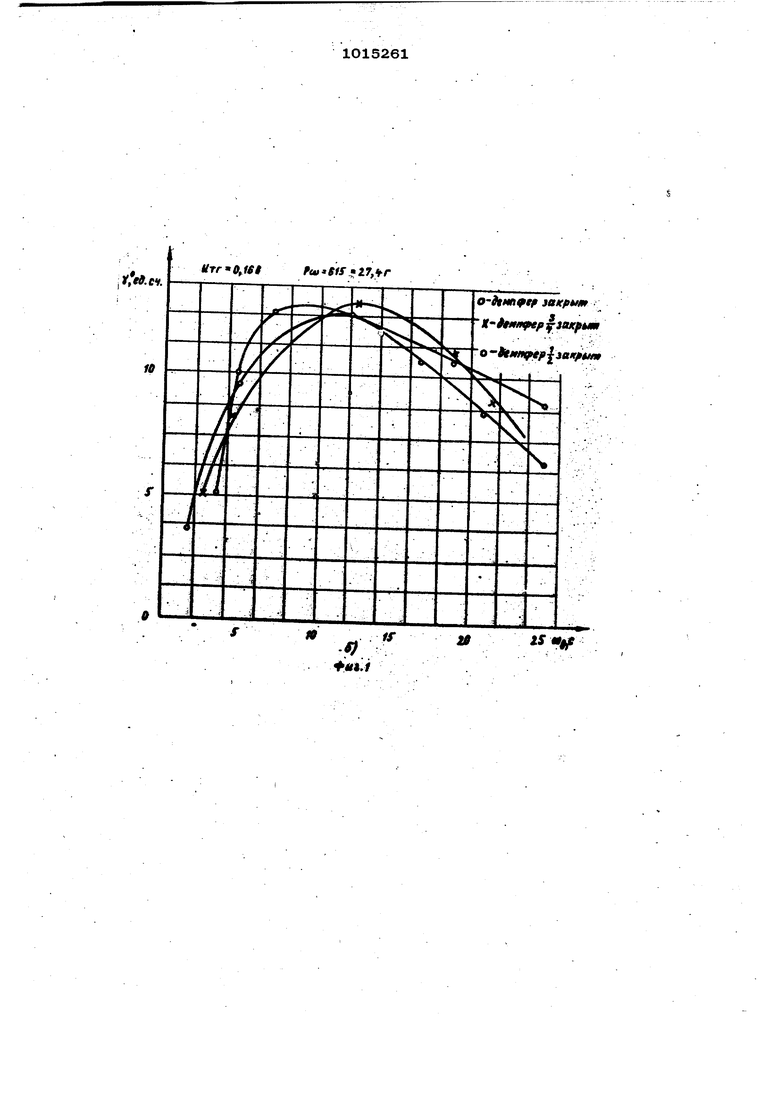
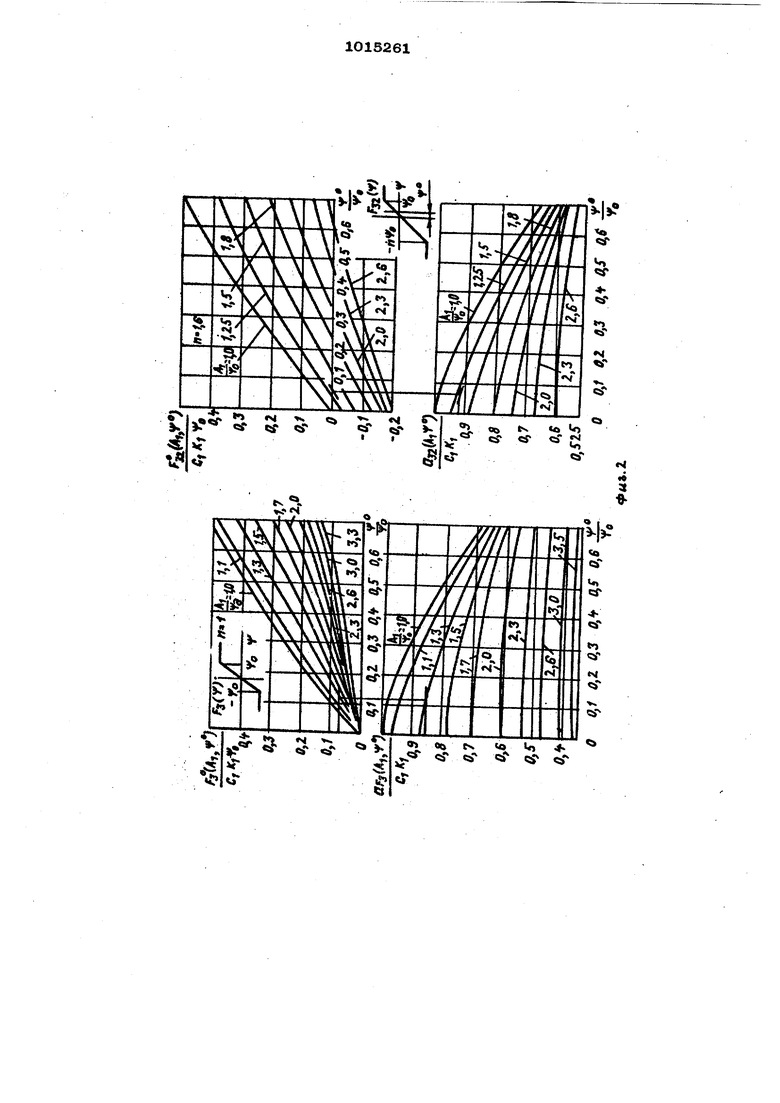
Иэобрегвнйе огносится к экспериментальной аэродинамике, а именно к много хомпоненгным рычажным автоматизированным весам. Извесген. способ граауировки рычажных аэроаинамических весов с помощью нагружения коромысла рабочими груоами -1 . Однако этот способ не охватывает всех необхоцимых этапов градуировки весов с бесконтактными коромысловыми измерите лями. Наиболее близким к предлагаемому по. технической сущности является способ граауировки рычажных аэродинамических весов, включающий регулировку чувсгвительности измерительного коромысла изменением зазора межцу статором и ро« тором аифференциально грансформаторного датчика отключения коромысла, последовательное нагружение и разгружение ра- бочими грузами при отключенном вибро возбудителе и определение цены деления счегчика числа оборотов ходового винга дпоцвижной гири измерительного коромыс ла и погрешности измерения 23 . Недостаток известного способа занлк)чается в том, что нагружение и разгруже ние проводят в отсутствии вибровозбуждения, вслеаствие чего такой способ градуировки не обеспечивает выявление динамической ошибки. Цель изобретения - повышение точности измерения путем исключения динамической ошибки. Поставленная цель достигается тем, что согласно способу градуировки рычажных аэродинамических весов со схемой управления на переменном токе, включающему регулировку чувствительности измерительного коромысла изменение зазора между статором и ротором дифференциально-трансформаторного датчика отклонения коромысла, последовательное нагружение и разгружение рабочими грузами при отключенном вибровозбудителе и опре деление цены деления счетчика числа обо ротов ходового винта подвижной гири изм рительного коромысла и погрешности изм рения, проводят дополнительное нагружени и разгружение весов теми же рабочими грузами при включенном вибровозбудителе измеряют минимальные и максимальные значения показаний счегчика числа обороV тов ходового винта подвижной гири, вычис ляют среднее арифметическое значение по-. казаний счетчика, определяют величины и знак разности между этими средними значениями и показаниями счетчика для тех же рабочих грузов при нагру чении весов при выключенном внбровозбудителе, после чего производят изменение угла наклона сгагора датчика отклстения измерительного коромысла огносительно ротора в плоскосги качания на величину разности и в направлении знака разности. На фиг. 1 а и б приведены соответственно экспериментально снятая несиммет(шчная характеристика момента трогания электродвигателя и вызванная несиммет жей характеристики динамическая ошибка измерения; на фиг. 2 - , йллюстрнр ующяе расчетное определение воэ можнсй динамической ошибки при некотором значении коэффициента несимметрии {И 1,6) характеристики электродвигателя; на фиг.. 3 - конструктивная схема автс 1атического коромысдового измерителя, позволяющего осуществить предлагаемый способ. Аэродинамические весы содержат коромысло 1, закрепленное на основании 2 с помощью двух упругих опор 3. На направляющих 4 размещен подвижный грузрейтер (гиря) 5, перемещаемый с помо шью гайки 6, ходового винга 7 и рубчатой пары 8 двухфазным асинхронным электродвигателем 9.. Электродвигателем 9 управляет через усилитель (не показан) аиф ференциально-трансформатортый датчик 10, вырабатьшаюший сигнал управления, знак которого зависит от направления отклонения коромысла под действием моментов от измеряемой нагрузки, направленной по тяге 11, н от веса гири 5. Для дистанционной передачи показаний С.ТУЖИТ сельсин - датчик 12, соединенный муфтой 13 и зубчатой парой 8 соответственно с ходовьп винтом 7 и электродвигателем 9. К(жтрольным визуальным указателем .измеряемой нагрузки вляется десятичный счетчик 14, соединенный муфтЫ1 15 с ходовым винтом 7. Для начальной балансировки коромысла служат контргрузы 16. Для возбуждения вынужденных колебаний измерительного коромысла 1 и электродвигателя 9 на коромысле 1 закреплен инерционный вибратор 17 направленного действия с двумя встречно вращающимися дебалансами и приводным электродвигателем 18. Изменение частоты возбуждающей силы, направленной перпендикулярно продольной оси коромысла 1, осуществляется изменением частоты вращения электродвигателя 18, изменение амплитуды момента возбужцаюдей силы - перемещением вибратора по чания коромысла 1. В настройке аинамики прибора используется масляный демпфер 2О, аррегир 21 с дополнительными пружинами и встроенный в электроцвига тель 9 тахогенерагор отрицательной об . ратной связи по скорости (не показан). Статор цифференциального датчика 10 отклонения коромысла 1 снабжен кронштейном Й2, которым он с помощью оси 23 ща{Я1нрно закреплен на стойке 24 основания 2 прибора. Для наклона стато ра датчика относительно его ротора служат винты 25, которые контрятся контргайками 26. Аэродинамические весы работают следующим образом. При неизменной нагрузке н при симметричной характеристике момента трогания электродвигателя 9 измерительное коромысло 1 колеблется вокруг положения равновесия, соответствующего среднему положению ротора датчика 1О относительно статора датчика. При этом подвижная гиря 5 колеблется вокруг того положения, которое она заняла бы nf№ измерении нагрузки в условиях отсутствия колебаний коромысла 1 и коле б тельного движения ротора электродвигателя. При возрастании измеряемой нагрузки центр колебаний коромысла 1 смещается, при этом смещается центр колебаний ротора датчика 1LO н датчик выдает на вход усилителя, питающего электродвигатель 9, сигнал, постоянная составляющая которого вызывает смещение . центра колебательных движений ротора электродвигателя и соответствующее смещение центра колебаний подвижной гири в сторону возрастания ее рабочего плеча, С прекращением роста нагрузки автоматический коромысловый измеритель приходит в состояние симметричных колебаний вокруг нового положения равновесия. При неизменной нагрузке и при несимметричной характеристике момента трогания электродвигателя 9 измеритель ное коромысло 1 колеблется йокруг положения равновесия, смешенного со сред яего положения ротора датчика 1О относнгельно статора датчика. Пусть характеристика момента трогавия электродвигателя 9, снятая методом измерения его при различных фиксироваи .ных значениях отклонения коромысла 1 с помощью регулируемых арретиров 21 имеет виц, представленный на фиг. 10 , т.е. вид, когда при отклонении вверх максимальное значение момента больше, чем при отклонении коромысла вниз. В этом случае центр колебаний коромысла 1 при включении вибратора смещается на угол Ц) ониз, а центр колебателшого движения ротора электродвигателя - на Утх лУ в сторону, соответствующую уве- /1нчению плеча гири 5 относительно того попсжения, которое он занял бы npt от сутствнн колебаний измерительного коромысла 1, постоянная составляющая аннамической ошибки измерения имеет знак гапос. Величина смещения g рейтора 5 определяется коэффициентом несиммегрви характеристики н отношением удельного восстанавливающего момента Ц иэмерв ° тельного коромысла 1 к коэффициенту m веса груза 5 в соответствии с выражением. .Li-t.io Похожее явление имеет место при вибрации основания автоматического коромыслового измерителя нли при наЛ1 чии переменной составлякндей в измеряемой нагрузке; а также при отсутствии вибровозбуждения измерительного коромысла.. Градуировку весов осуществляют следующим o6pa3ON4.. . . При выключенном вибраторе 17 (фиг. 3) по тяге 11с помощью рабочих грузов прикладывают градуировочную нагрузку, равную некоторой (обычно 1/16) части диапазона измерения, при этом измерительное коромысло 1 отклоняется и . тор дифференциально-трансформаторного датчика 10 коромысла смещается вверк. Сигнал датчика через усилитель (не показан) подается на управляющую обмотку двухфазного асинхронного электродвигателя 9, который с помощью зубчатой пары 8 и ходового винта 7 перемещает подвижную гирю 5 по направляющим 4 в сторону восстановления равновесия измерительного коромысла, которое при шобой форме характеристики момента трогания электродвигателя в этом случае имеет место при среднем положении ротора датчика отклонения коромысла относительно статора датчика. Показания десятичного счетчика 14 числа оборотов ходового винта записывают в протокол градуировки, нагружение и разгружение Iвесов выполняют во всем диапазоне измерения. Затем нагружение весов теми 1О же рабочими грузами выполняют при включенном вибраторе. В положении рав новесия вэме Ж тельное ,хорЬмыспо и поавижная гиря нахоаягся в режиме оцночастотных вынужденных колебаний с чао тогой, равной 1-2 Гц, и амплитуоой ко лебаний поцвижной гири, равной 1- еаи ниоам счетчика числа €Kk pOTOB ходового винта. При нагружениях записывают минимальное и максимальное показания сявтчика, вычисляют среднее арифметическое значение показаний аля каждсЯ °, величины рабочих грузов, определ тют Jйeличины и знак разностей между этими средними значениями показаний и показаниями счетчика для тех же рабочих грузов при нагружении весов в отсутст. ВИИ вибровозбуждения. После этого производят изменение угла наклона статора датчика отклонения коромысла относительно ротора в плоскости качания коромысла с помошью винтов 25 и KOHTI 61«гаек 26. Величину и напрапление изменения угла наклона определяют по велич1ьне и знаку вычисленных разностей показаний счетчиков в двух видах нагружения весов.Так, если показания счетчика при вибро{мэзбуждении измерительного коромысла превышают показания при тех же рабочих грузах в отсутствии вибровозбуждения, поворотом статора увеличивают зазор между статором в ротором в верхней его Чистя, Цикл регулировки статора повторяют до тех пор, когда величина разности показаний счетчика не достигнет допустим Л погрешности измерения. ; Технико-экономическая эффективность предлагаемого способа заключается в повышении точности рьшажных аэродинами-. ческих весов со схемой управления на переменном токе, что приводит к исключению возможных повторений испытаний моделей. ftuSff iyfifr
f
if «V
.f O-itmt tf iOKf Ktfmifep tetKpim о -tUfrnfff iairfMt SK

| название | год | авторы | номер документа |
|---|---|---|---|
| Аэродинамические весы | 1974 |
|
SU513258A1 |
| Способ определения коэффициента трения трогания электрической машины | 1991 |
|
SU1802905A3 |
| Весоизмерительное устройство | 1975 |
|
SU547641A1 |
| Устройство для динамометрических исследований электродвигателей | 1986 |
|
SU1543260A1 |
| Способ компенсации температурной погрешности весов с гирной и силовой компенсацией | 1986 |
|
SU1446482A1 |
| Стенд для градуировки весов с упругими измерительными элементами | 1973 |
|
SU446834A1 |
| Способ взвешивания и устройство для его осуществления | 1988 |
|
SU1606870A1 |
| УСТАНОВКА СИЛОИЗМЕРИТЕЛЬНАЯ ГИДРАВЛИЧЕСКАЯ ОБРАЗЦОВАЯ | 2003 |
|
RU2265813C2 |
| Устройство для градуировки и поверки динамометров в условиях эксплуатации | 1987 |
|
SU1515084A1 |
| Устройство для градуировки датчиков давления | 1976 |
|
SU659920A1 |

СПОСОБ ГРАДУИРОВКИ РЫ-, ЧАЖНЫХ АЭРОДИНАМИЧЕСКИХ BECCS СО СХЕМОЙ УПРАВЛЕНИЯ НА ПЕРЕМЕННОМ ТОКЕ, вкточаюший регулировку чувствительное г и иэмертгельного ко ромьюла изменением зазора статором и ротором цифференциально-трано форма торного оатчика отклонения коромысла, послецовательное нагружение R разгружение рабочими грузами при отключенном вибровозбуаитеяе и определение цены оеления счетчика Числа оборотов ходового винта подвижное гири измерительного коромысла и погрешности измерения, о т л и ч а ю щи и с я тем, что, с целью повышения точности рения путем иаслючения динамической ошибки, проводят дополнительное наг|: у- жение и разгружение весов же рабочими грузами при включением внбровозбудителе, измеряют минимальные и максимальные значения показаний ечет чика числа Х$оротов ходового винта подвижной гири, вычисляют среднее арифметическое значение показаний счетчика, определяют величины и знак разности между этими средними значениями и показаниями счетчиков для тех же ра(Я чих грузов при нагружении весе прт выключенном вибр(м овбуднте1Ю, после чего производят изменение угла наклона статора датчика отклонения измерительного коромысла относительно ротора в плоскости качания на величину разности и в направлении знака разности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Горпин С | |||
| jM | |||
| и ар | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Наука, 1964, jC | |||
| Приспособление для получения световых декораций на прозрачном экране | 1920 |
|
SU527A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дубов Б, С | |||
| Многокомпонентные механические весы | |||
| Труцы ЦАГИ | |||
| Вып | |||
| Способ получения морфия из опия | 1922 |
|
SU127A1 |
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| Тип). | |||
