Изобретение относится к области приборостроения, а именно к способам взвешивания на весах с гиревой и силовой компенсацией.
Цепью изобретения является повышение точности измерения.
Поставленная цель достигается путем компенсации температурной состав- лякмцей погрешности за счет ступенча- того изменения температуры окружающей среды, выдержки весов на каждой температурной ступени с целью стабилизации их параметров. На каждой ступени после выдержки весы нагружают эталонными массами, соответствующими .полному диапазону гиревого уравнове- шивания данных весов, и каждое значение эталонной массы уравновешивают соответствующими встроенными гирями весов. После этого по силовому компенсатору определяют разность между фактической массой эталонного груза и показаниями весов. Указанные измерения производятся в допускаемом при эксплуатации весов температурном диапазоне окружающей среды. Полученные значения в виде поправок с соответствующими знаками фиксируют или вводят в запоминающее устройство.
При необходимости определить значение какой-либо неизвестной массы с высокой точностью ее устанавливают на платформу весов и измеряют ее значение, затем к полученному с помощью гирного уравновешивания значению алгебраически прибавляют или вычитают в зависимости от знака температурной поправки, а полученный результат суммируют со значением веса, уравнове- шенного с помощью силового компенсатора.
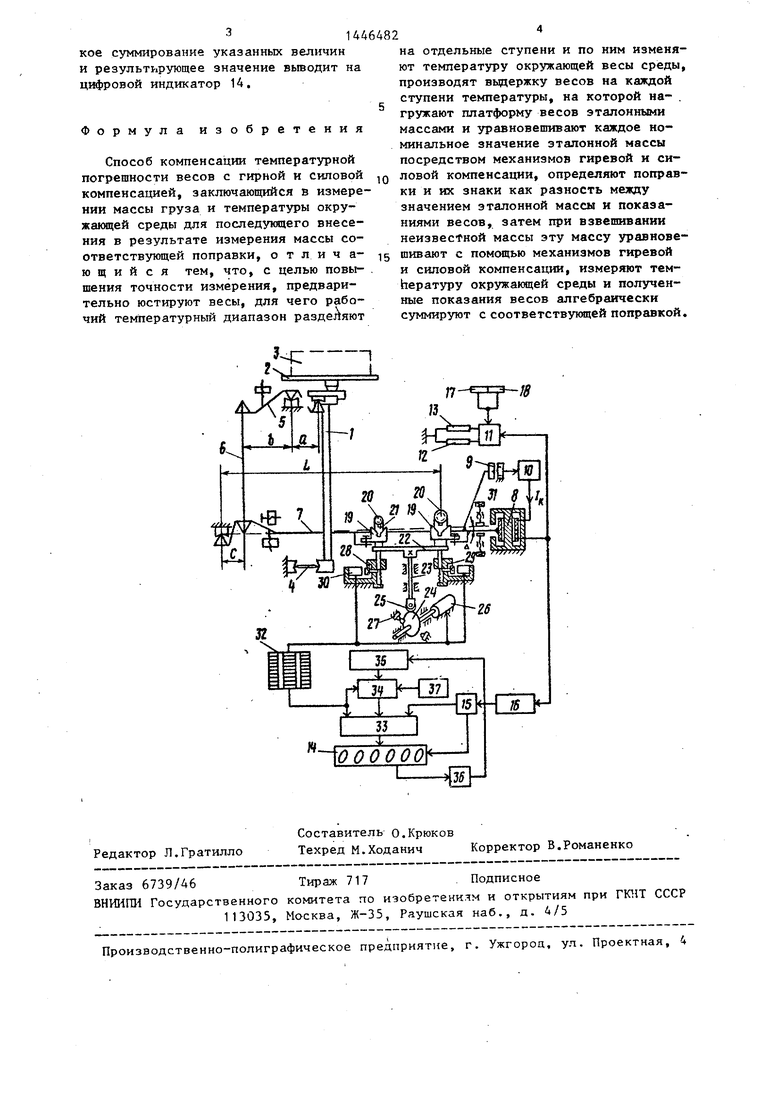
На чертеже изображена кинематическая схема весов, реализукяцих данный способ.
Весы содержат подвеску 1, грузо- приемную чашку 2 с грузом 3, ограничительный шарнир А, грузовое коромысло 5, тягу 6, измерительное коромысло 7, силовой компенсатор 8, датчик 9 разбаланса, усилитель 10. Сие- тема уравновешивания состоит из ключа 11, отклонякяцего резистора 12 точного взвешивания и подключакодего резистора 13 грубого взвешивания. Цифровой индикатор 14 .через ключ 15 связан с аналого-цифровым преобразователем (АЦП) 16, который через силовой компенсатор 8 связан с выходом
Q 0 5 0
д
5
5
усилителя 10. Резисторы грубого и точного взвешивания через ключ 11 подключаются к кнопкам 17 и 18. Измерительное коромысло 7 снабжено призмами 19, с которыми взаимодействуют гири 20, расположенные на штоках 21, штоки 21 взаимодействуют с планкой 22, закрепленной на толкателе 23. Толкатель 23 через кулачок 24 и ролик 25 связан с электродвигателем 26, управляемым от переключателей 27. Штоки 21 с гирями 20 при опускании удерживаются пальцами 28, взаимодействуюащки с пружинами 29 и электромагнитами 30. Регулируемые упоры 31 служат ограничителями угла наклона коромысла 7. Весы содержат также переключатель 32 наложения гирь 20, сумматор 33, коммутатор 34 и запоминающее устройство (ЗУ) 35, которое через ключ 36 подключено к выходу цифрового индикатора 14. К коммутатору 34 подключен датчик 37 температуры.
Весы работают следующим образом.
В исходном состоянии все гири 20 сняты с призм 19, гиревой переключатель 32 находится в исходном положении, кнопка 18 включена, коромысла 5 и 7 находятся в равновесии.
Производят вьиержку весов при заданной температуре окружающей среды, затем на чашку 2 устанавливают последовательно эталонные массы с шагом, равным шагу гиревой компенсации. На призмы 19 устанавливают соответствующие гири 20, номинальная масса которых равна номинальному весу эталонной массы, установленной на чашку 2. Выходной сигнал с датчика 9 разбаланса через усилитель 10, АЦП 16 и ключ 15 поступает на индикатор 14, на котором с соответствуквдим знаком индицируется разность между эталонной массой и соответствующей суммой масс гирь 20. Разность и ее знак вводятся в ЗУ 35. Последовательно изменяя температуру окружающей среды, определяемую посредством датчика 37 температуры, определяют поправки всего диапазона гиревого уравновешивания и вносят их в ЗУ 35. При взвешивании измеряемой массы в сумматор 33 поступают информация о массе наложенных гирь 20, поправка из ЗУ 35, а также сигнал с АЦП 16, пропорциональный нескомпенсированному гирями 20 разбалансу. Сумматор 33 производит алгебраическое су мирование указанных величин и результирующее значение вьгоодит на цифровой индикатор 14.
Формула изобретения
Способ компенсации температурной погрешности весов с гирной и силовой компенсацией, заключающийся в измерении массы груза и температуры окру- жакмцей среды для последующего внесения в результате измерения массы соответствующей поправки, отличающийся тем, что, с целью повы- шения точности измерения, предварительно юстируют весы, для чего рабочий температурный диапазон разделяют
на отдельные ступени и по ним изменяют температуру окружающей весы среды, производят вьдержку весов на каждой ступени температуры, на которой нагружают платформу весов эталонными массами и зфавновешивают каждое номинальное значение эталонной массы посредством механизмов гиревой и силовой компенсации, определяют поправки и их знаки как разность между значением эталонной массы и показаниями весов, затем при взвепшвании неизвестной массы эту массу уравновешивают с помощью механизмов гиревой и силовой компенсации, измеряют тем- Ьературу окружающей среды и полученные показания весов алгебраически суммируют с соответствукмцей поправкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Устройство для определения веса | 1985 |
|
SU1281911A1 |
| Устройство для измерения статических моментов лопаток турбомашин | 1987 |
|
SU1420417A1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
| Способ взвешивания и устройство для его осуществления | 1988 |
|
SU1606870A1 |
Изобретение относится к способам взвешивания на весах с гиревой и силовой компенсацией. Целью изобретения является повьпяение точности измерения. Это достигается путем компенсации температурной составляющей погрешности в весах с гирной и силовой компенсацией путем ступенчатого изменения температуры окружающей весы среды, выдержки весов на каждой ступени температуры, при этом весы нагружают поэтапно эталонными массами до наибольшего предела гиревого уравновешивания весов. Каждое значение эталонной массы уравновешивают встроенными гирями весов, а затем по силовому компенсатору определяют разность между фактической массой эталонного груза и показаниями весов. Указанные измерения производятся в допускаемом при эксплуатации весов температурном диапазоне. Полученные значения в виде поправок с соответствующими знаками вводятся в запоминающее устройство и при определении какой-либо массы при известной температуре алгебраически суммируются со значением массы. 1 ил. $ J Ф 00 to
Щ
Wooooo
t--ей
(j
| Автоматические большегрузные весы | 1979 |
|
SU775627A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гаузнер С.И | |||
| и др | |||
| Измерение массы, объема и плотности | |||
| Изд-во стандартов | |||
| М., 1982, с.266-267. | |||
