,1017655
и третьего опера)дионных усилителей,соединены со входами схемы сравнетретьей и седьмой схем умноженияния.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2008 |
|
RU2372638C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1764990A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2706079C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2041054C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |

1
Изобретение относится к подъемнотранспортному оборудованию, а именно к устройствам для управления гру зоподъемными транспортными средствами с гибкой подвеской груза, и может быть использовано для демпфирования колебаний грузозахватного органа.
Известно устройство для управления грузоподъемным транспортным средством с гибкой подвеской груза, содержащее последовательно соединен.ные блок коррекции скорости по пути и регулятор скоростиj датчики скорости и пути, подключенные к входам первого и второго сумматора, датчик длины вытравленного грузового каната, командоаппарат, схему сравнения и блок определения моментов времени переключения режима работы 1 |.
Недостатком известного устройства является сравнительно низкая его производительность.
Цель изобретения - повышение производительности устройства.
Указанная цель достигается тем, что устройство для управления ГРУ зоподъёмным транспортным средством с гибкой подвеской груза, содержащее последовательно соединенные блок коррекдйи скорости по пути и регулятор скорости, датчики скорости и пути, подключенные ко входам первого и эторого сумматоров, датчик длинь) вытравленного грузового.каната, командоаппарат, схему сравнения и блок определения .моментоа времени пере- ключения режима работы, снабжено элементами памяти, входы которых связаны с выходами датчиков скорости, пути и длины вытравленного грузового каната,дополнительным сумматором, вход .которого соединен с выходом датчика длины вытравленного грузового каната и генератором опорного напряжения, . примем выходы элементов памяти подсо единены к входам соответствующих сумматоров, выходы первых двух из которых соединены со входами блока ко ррекции скорости по пути, входы блрка определения момента времени переключения режима работы подсоединены к выходам сумматоров, а выход - к первому входу схемы сравнения, другие входы которой соединены с выходами командоаппарата и генератора опорного напряк{ения, а выход - со входом регулятора скорости, причем блок определения моментов времени переключения режима работы включает в себя схемы деления, первая из которых соединена через первую схему извлечения квадратнрго корня с первой и второй схемами умножения, причем первая схема умножения связана через последовательно соединенные первый и второй операционные усилители с третьей схемой множения,вторая схема умножения подключена через последовательно соединенные третий и четвертый операционные усилители к второму операционному усилителю, вторая схема деления связана через четвертую и пятую схемь умножения соответственно с первым и третьим операционными усилителями, шестая схема умножения соединена с третьей схемой деления, которая связана через пятый операционный усилитель с третьей и седьмой схемами умножения, восьмая схема умножения соединена через вторую схему извлечения квадратного корня с третьей схемой.деления, третий операционный усилитель соединен с седьмой схемой умножения, а задатчик коэффициентов соединен .с первой и второй схемами деления, с первой, второй, четвертой, пятой, шестой, восьмой схемами умножения, с пятым операционным усилителем, при этом вход первой схемы деления и восьмой схемы умноженияподключены к выходу второго сумматора, входы второй схемы деления и шестой схемы умножения подключены к выходу третьего сумматора, а выходы первого и третьего операционных усилителей, третьей и седьмой схемы умножения соединены со вхоДами схемы сравнения.
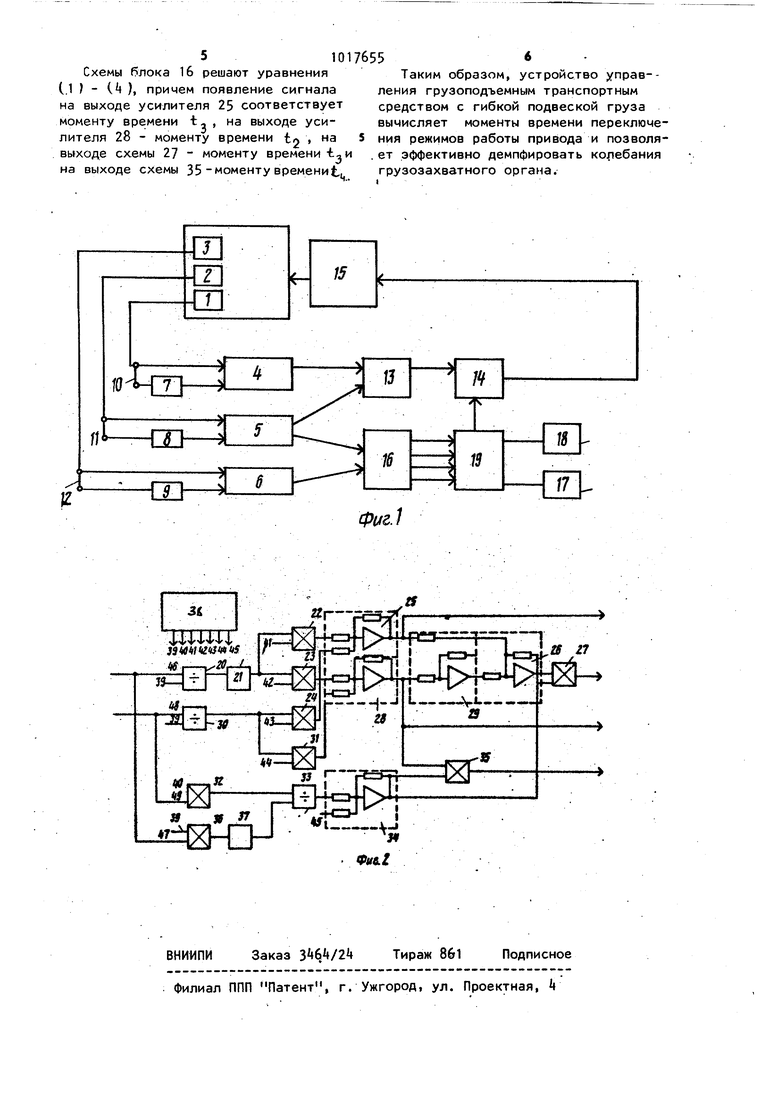
На изображена функциональная .схема устройства для управления грузоподъемным транспортным средством с гибкой подвеской груза; на фиг,2 функциональная схема блока вычисления моментов времени переключения режимов. Устройство для управления грузоподъемным транспортныу средством с гибкой подвеской груза содержит датчик 1 пути средства, дат-чик 2 длины вытравленного грузового каната и дат чик 3 скорости средства. Выходы датЧй ков 1-3 подключены ко сумм аторов и6, другме входы которых соединены с выходамиЗапоминающих схем входы которых через .перекл матели 10-12 соединень с выходами Датчиков Т-З. Выходы сумматоров и 5 подклюме ны ко входу блока 13 коррекции скороети Попути, выход которого соединен со входом регулятрра 1А скорости;, вы.хОд которого соединен с управляющим ; входом электропривода 15. Выходы сум-. маторое 5 и 6 соедйнеьм со входами блока 16 вычисления моментов времени переключения режимов, выход которого i вместе с выходами команДОаппарата 17 и генератора 18 опорного сигнала под.ключены ко входам схемы 19; сравнения, выход которой подсоединен ко входу per гулятотза схемы 19 сравнения, выход ко торой подсоединен ко входу регулятора 14. Блок 16 содержит первую схему 20 деления, соединенную через первую схем извлечения квадратного корня 21 с лервой и второй схемами 22 и 23 умно«е.ния причем первая схема 2k умножения связана через последовательно соеди ненные первый и второй операционные усилители 25 и 26 с третьей 2 умножения, вторая схема умнсвкения 23 подключена через последовательно соединенные третий 28 и четвертый 29 операционные усилители со вторым опера ционным усилителем 26, вторая схема 30 деления связана через четвертую 2k и пятую 31 схемы умножения соответственно с пер.вым и третьим операционными усилителями 25 и 28, шестая схема 32 умножения соединена с третьей схемой 33 деления, которая связана через пятый операционный усилитель 34 с третьей 27 и седьмой 35 схемами умножения, восьмая схема 36 умножения соединена через вторую схему 37 извлечеТ|ия квадратного корня с третьей схемой 33 деления, операционный усилитель 34 содеинен с седьмой схемой 35 умножения. Задатчик 38 коэффициентов свои.ми выходами- соединен с первой и второй схемами деления 26,, 30, со схемами 22, 23, 24, 31 и 32 умно105 . 4 жения, с операционным усилителем 3. При этомвход А6 пе0вбй схемы 20 деления и вход Л восьмой схемы 36 умножения подключены к выходу сумматора 5 а входы W второй схемы 30 деления и вход 9 шестой cxef 32 умножения подключены к выходу сумматора 6. Выходы усилителей 25 и 28 и схем 27 и 35 подключены к входам схемы 19 сравнения. Л, Устройство работает следующим образом. Линейное перемещение механизма передвижения средства (тележки ) в определенный момент времени .фиксируется датчиком 1 длина каната - датчиком 2 скорость пер1эмещения - датчиком 33:9поминак)ц(ие схемы 7-9 фиксируют показания датчиков Т-3. При перемещении тележки запоминающие схемы посылают эти сигналы на сумматоры -6. С выходов сумматоров и 5 сигналы nocTyTiaoT на блок 13 и. далее на регулятор Н скорости, одновременно сигналы с выходов сумматоров 5 и-6 подаются соответственно блок 16, а результаты вычислений поступают в схему 19 которая в Определенные блоком 16 моменты времени изменяет режим работы электропривода 15, воздействуя на регулятор 1... Для демпфир ованйя колебаний периодически быстро изменяют установившуюся скорость электропривода 15 до нулевого значения и после паузы вновь восстанавливают ее до первоначального значения. Моменты времени -t.-i. 1 электропривода 15 рассчитываются по формулам: 0.254 г ; fi. 4,0944-§- () iVS) гдёЬц - длина вытравленного каната; о установившаяся скорость электропривода; -ускорение свободного падения.
Схемы блока 16 решают уравнения (.1 J - С ), причем появление сигнала на выходе усилителя 25 соответствует моменту времени t,, на выходе усилителя 28 - моменту времени t2 выходе схемы 27 - моменту времени tj и на выходе схемы 35-моменту времениt.
Таким образом, устройство управ-ления грузоподъемным транспортным средством с гибкой подвеской груза вычисляет моменты времени переключения режимов работы привода и позволяет эффективно демпфировать колебания грузозахватного органа.
| Г | |||
| Камера для диатермии ультракороткими волнами | 1929 |
|
SU20227A1 |
