Изобретение относится к системам управления электроприводом грузоподъемных машин и предназначено для автоматического управления движением крановой тележки.
Цель изобретения - повышение надежности.
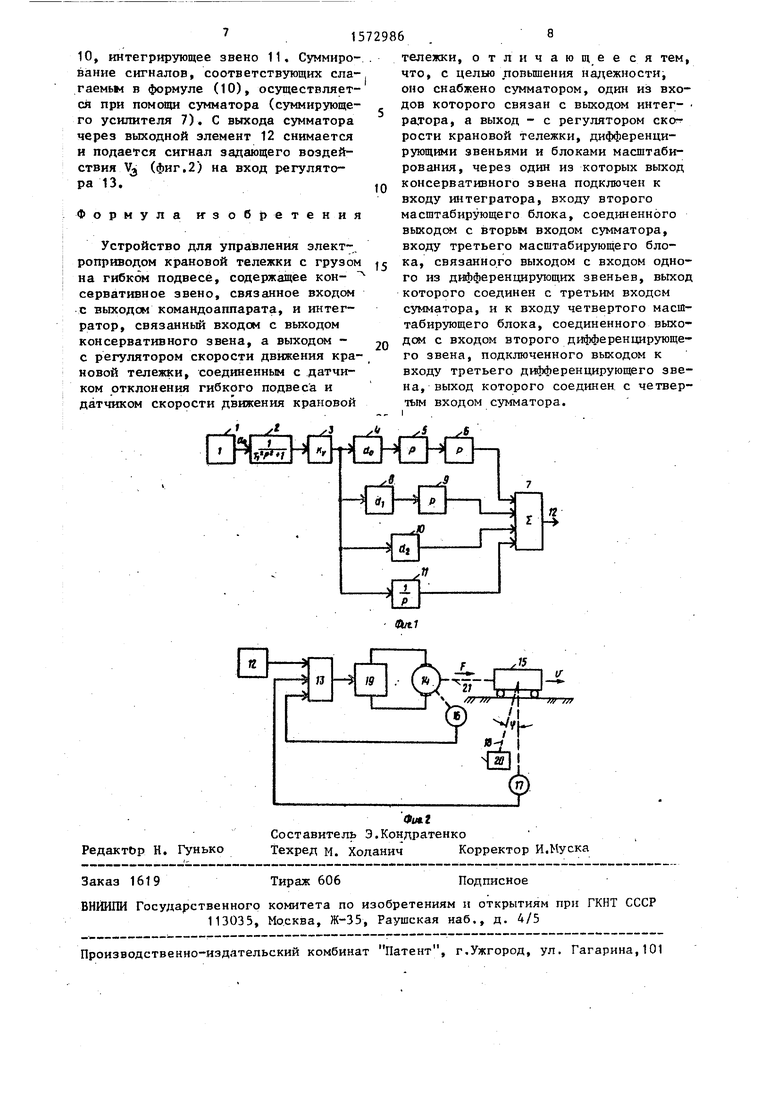
На фиг. 1 представлена блочная схема задатчика скорости крановой тележки; на фиг, 2 - функциональная схема устройства для управления электроприводом крановой тележки с грузом на гибком подвесе.
Задатчик скорости содержит последовательно соединенные командоаппарат 1, консервативное звено 2 с передаточной функцией ffpV + 1 и блок 3
масштабирования. К выходу блока 3 подключены последовательно соединенные блок 4 масштабирования, дифференцирующее звено 5 и дифференцирующее звено 6, выход которого подключен к одному из входов сумматора 7. К выходу блока 3 подключен также последовательно соединенный блок 8 масштабирования, дифференцирующее звено 9, выход которого соединен с вторым входом сумматора 7. С третьим и четвертым входами сумматора 7 соединены соответственно выходы блока 10 масштабирования и интегратора 11, входы которых подключены к выходу первого блока 3. Блоки масштабирования выражены в виде усилителя. Задатчик скоСП
И
43 00
о
ростн крановой тележки через выходной элемент 12 подключен к первому входу регулятора 13 скорости электродвигателя 14 привода крановой тележки 15 (фиг.2), к второму и третьему входу которого подключены соответственно датчик 16 скорости крановой тележки (электродвигателя 14) и датчик 17 отклонения гибкого подвеса (угла -f отклонения грузового каната 18). Электродвигатель 14 включен в силовую цепь тиристорного преобразователя 19, вход которого соединен с выходом регулятора 13 скорости. Груз 20 соединен с крановой тележкой 15, имеющей механическую связь 21 с электродвигателем 14 при помощи грузового каната 18.
Для описания сущности работы устройства рассмотрим систему дифференциальных уравнений, описывающих дви- жение груза и крановой тележки под действием ускорения:
1 и)я dV 1 ZtJ 6 dt
м S + mg F
(1)
на общую передаточную функцию относительно входного задающего воздействия:
М(Р) Vft(P) ),
(3)
KoF
где W4(P) - +b,p btfT-Ty) Л.(4)
Кл,К3К
bo
5
0
5
ъ,
ь
1 + KoKg + К|,КЭК, КЧК3К
Ко к 1;
о Т2 i
Т° 8
к -1 к5 - „,
„ m
Ks м 8
С учетом обратной связи по Ч и конечного значения К, а также коэффициентов Kg, Кч и Кэ, которые влияют на качество переходного процесса, задающее воздействие (в операторах Лапласа) имеет вид
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе | 1990 |
|
SU1799843A1 |
| Устройство для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза | 1988 |
|
SU1527134A1 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Задатчик скорости механизма горизонтального перемещения груза на гибком подвесе | 1988 |
|
SU1646981A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для демпфирования колебаний грузозахватного органа крана | 1977 |
|
SU1053443A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
Изобретение относится к системам управления электроприводом грузоподъемных машин и предназначено для автоматического управления движением крановой тележки. Цель изобретения - повышение надежности. Устройство содержит регулятор скорости движения крановой тележки, соединенный входами с датчиком отклонения гибкого подвеса и датчиком скорости движения крановой тележки, а также с выходным элементом задатчика скорости, выполненного в виде командоаппарата. Последний связан с входом консервативного звена, выход которого подключен через блок масштабирования к входам блоков масштабирования и входу интегратора. Интегратор соединен выходом с входом сумматора, подключенного выходом через выходной элемент к регулятору, вторым входом-через последовательно соединенные дифференцирующие звенья к выходу блока, третьим входом - через дифференцирующее звено к выходу блока и четвертым входом-к выходу блока. 1 з.п. ф-лы, 2 ил.
где Мит- масса (приведенная) кра- 30
новой тележки и груза, 1 - длина грузового каната, F - внешнее избыточное (без учета силы сопротивления) усилие,35
g - ускорение силы тяжести. Избыточное усилие F для системы автоматического регулирования (САР) скорости электродвигателя может быть записано в виде40
F K(V3 - -tflft/ (2)
где К - общий коэффициент передачи цепи регулятор скорости - электродвигатель, 5 V3 - задающее в воздействие
(скорость), Куи йЈ - коэффициенты передачи
цепи отрицательной обратной связи по V и Ц соответственно.
50
, С помощью формул (1) и (2) можно , построить структурную схему САР. Для схемы устройства изображение по Лап- ласу выходного сигнала (в данном случае - угла U отклонения грузового каната) равно изображению по Лапласу входного сигнала (V), умноженному
(т -
г ) - -zr- ГТГтГ5
-
Р + 1 K(d0P3 + + dbP + Q
К„Р
(5)
При этом, если выбрать значения d0, d, и d.j из условия равенства их соответственно Ъ0, Ъ и Ъ/г то тем самым можно для некоторой вполне определенной структуры САР значений ее параметров найти задающее воздействие, обеспечивающее точное регулирование как угла Ф отклонения грузового каната, так и скорости V крановой тележки. Действительно, для Ц можно, подставив (5) в (3), получить формулу
lO(-p) -аРК| -
тр) Р(Т.Р + 1
Kv(d0P3 + d + UP + 1) . -„
KoP
Kv(b0P3 + b(P2 + + l)
o-f (1 -
(o,
Для скорости V крановой тележки передаточная функция имеет вид
Wtf(P)
T2p2
1
Kv(b0P3 + b«P3 + b.P + 1)
Изображение по Лапласу для скррос- ти крановой тележки при задающем воздействий вида (5)
(V)P Ve(P) ).(8)
Подставив (8) формулы (5) и (7), получим
d0(T2P2 + 1)
Р2
(Т2р2
+ 1)
(9)
Таким образом, если задающее воздействие (его изображение) будет вида (5), то тем самым обеспечивается независимость регулируемых параметров if и V как от конкретной структурной схемы САР, так и от ее параметров, а точнее, новое задающее воздействие обеспечивает регулирование If и V в соответствии с заданным (по условиям управления) законом. При этом регулирование указанных параметров относительно задающего воздействия также сопровождается динамической ошибкой, без которой в реальной САР осуществить регулирование невозможно.
С целью определения вида корректирующего воздействия найдем оригинал по изображению (5), т.е. зависимость изменения задающего воздействия во времени. Для этого преобразуем (5) в сумму
V3(P)
откуда
Va acKv (d.fl2 - 1) sinfl t +
+ d0fl2 -cosfl t + dЈ (1 -(Ю
- cos /I t) + t,
Вид (10) определяет структуру и тип звеньев предлагаемого устройства, а вид 11 показывает изменение задающего воздействия Vj во времени, т.е. сигнала V5 с выхода устройства.
Запишем (Ю). в следующем виде:
/(Р) ЈflЈLr 1(depa +
(12)
Г
Т2Р2 +. 1
+ d,P + Аг +
.
Зависимость (12) реализована в схеме задатчика скорости в виде консервативного звена с передаточной
5 функцией -г у +-у, четырех усилителей
с коэффициентами усиления соответственно Kv , d, , dt и dj , трех дифференцирующих звеньев, а также интегратора
с передаточной функцией -. При этом
передаточные коэффициент консервативного звена, дифференцирующих звеньев и интегратора должны быть равны
15 единице. В противном случае их можно сделать равными и ввести-новый (вместо KV) общий передаточный коэффициент, в который К,/ входит сомножителем.
20 Сущность работы предлагаемого устройства заключается в следующем.
В момент начала разгона крановой тележки 15 от командоаппарата 1 на вход консервативного звена 2 поступа25 ет ступенчатый сигнал а0 напряжения постоянного тока. При этом на выходе консервативного звена 2 появляется сигнал, который проходя через блок 3 с коэффициентом масштабирования, рав3Q ньм Kv, поступает на входы блоков 4, 8 и 10, а также на вход интегратора 11. Как следует из (12), коэффициенты усиления блоков 4, 8 и 10 должны быть соответственно равны d/, di и d. Они могут- быть определены, поскольку все значения параметров известны, а именно можно рассчитать или определить опытным путем общий коэффициент передачи К цепи регулятор 13 скорости - тиристорный преобразователь 19 - электродвигатель 14, масса (приведенная совместно с массой вращающихся частей привода) крановой тележки 15 и масса груза 10 известны, длина 1 грузового каната 18 также известна (предполагается, что разгон крановой тележки осуществляется при 1 const). Значения 0( и Ку могут быть определены, а их значения, в свою очередь,- использованы
5® при расчете d0 и dj.
Первое, второе, третье и четвертое слагаемые (точнее, соответствующие им сигналы напряжения постоянно- 55 го тока) в формуле (10) получаются путем прохождения сигнала с выхода блока 3 соответственно через блок 4 и дифференцирующие звенья 5 и 6, блок 8 и дифференцирующее звено 9, блок
35
40
715
10, интегрирующее звено 11. Суммирование сигналов, соответствующих слагаемым в формуле (10), осуществляется при помощи сумматора (суммирующего усилителя 7). С выхода сумматора через выходной элемент 12 снимается и подается сигнал задающего воздействия Vj (фиг.2) на вход регулятора 13.
Формула изобретения
Устройство для управления элект-. роприводом крановой тележки с грузом на гибком подвесе, содержащее кон- сервативное звено, связанное входом с выходом командоаппарата, и интегратор, связанный входом с выходом консервативного звена, а выходом - с регулятором скорости движения крановой тележки, соединенным с датчиком отклонения гибкого подвеса и датчиком скорости движения крановой
Г
я
Редактор Н. Гунько
9м.г
Составитель Э.Кондратенко
Техред м. Холанич Корректор И.Муска
Заказ 1619
Тираж 606
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
8
тележки, отличающееся тем, что, с целью повышения надежности, оно снабжено сумматором, один из входов которого связан с выходом интег- ратора, а выход - с регулятором ско10
15
20
рости крановой тележки, дифференцирующими звеньями и блоками масштабирования, через один из которых выход консервативного звена подключен к входу интегратора, входу второго масштабирующего блока, соединенного выходом с вторым входом сумматора, входу третьего масштабирующего блока, связанного выходом с входом одного из дифференцирующих звеньев, выход которого соединен с третьим входом сумматора, и к входу четвертого масштабирующего блока, соединенного выходом с входом второго дифференцирующего звена, подключенного выходом к входу третьего дифференцирующего звена, выход которого соединен с четвертым входом сумматора.
Подписное
| Устройство для демпфирования колебаний грузозахватного органа крана | 1977 |
|
SU1053443A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
