СО
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Регулятор скорости движения транспортного средства | 1986 |
|
SU1498646A1 |
| Электропривод постоянного тока с управляемой механической передачей | 1990 |
|
SU1823122A1 |
| Устройство для регулирования скорости реверсивного прокатного стана с вертикальными и горизонтальными валками | 1980 |
|
SU956082A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Позиционный электропривод постоянного тока | 1984 |
|
SU1246313A1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
Изобретение относится к электротехнике и может быть использовано для управления электроприводом буровой лебедки. Целью изобретения является повышение производительности и уменьшение динамических нагрузок при спуско-подьемпыл i.nri рациях. Согласно данному способу с заданной интенсивностью разгоняют электропривод и в начале процесса разгона отключают вход элемента памяти. В процессе работы непрерывно измеряют разность между измеряемыми усилиями и допустимыми статическими усилиями, выделяя фактические динамические усилия. Полученную разность сравнивают с уставной. Еслг зели- чина динамических усилий превыша ус- тавку. то электропривод отключают. .. с.п. ф-лы. 5 ил.
Изобретение относится к электротехнике и может быть использовано для управления электроприводом постоянного тока буровой лебедки.
Целью изобретения является повышение производительности и уменьшение динамических нагрузок при спускоподъемных операциях.
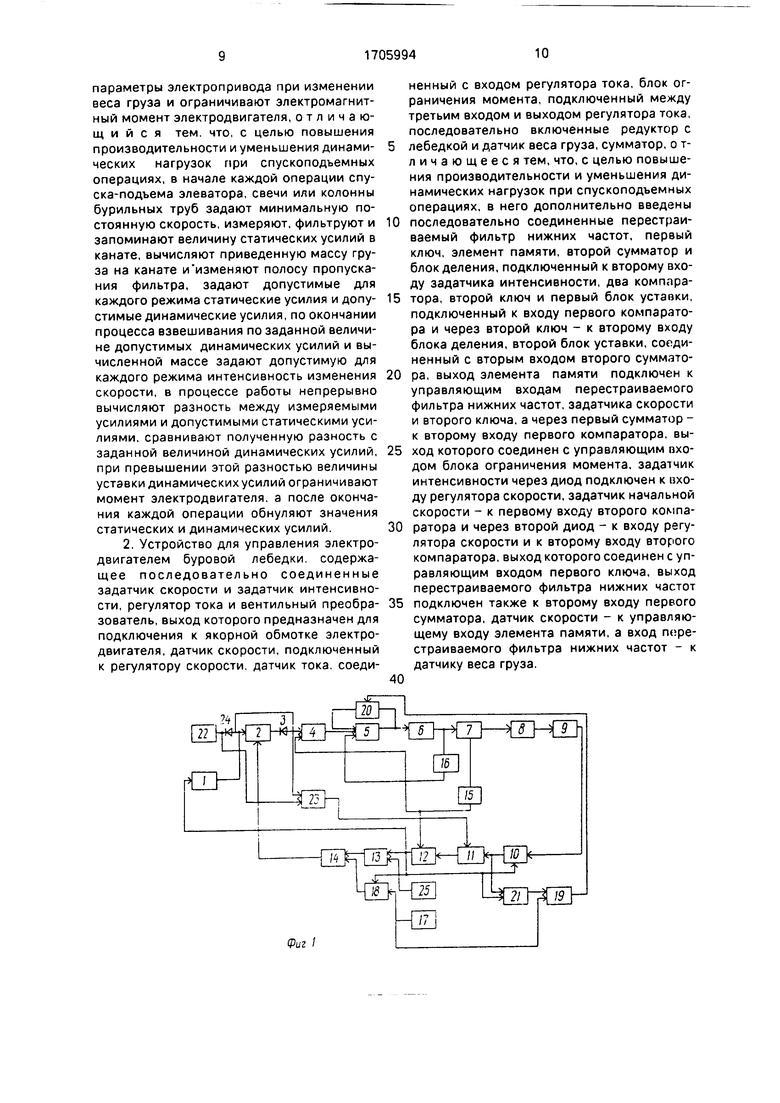
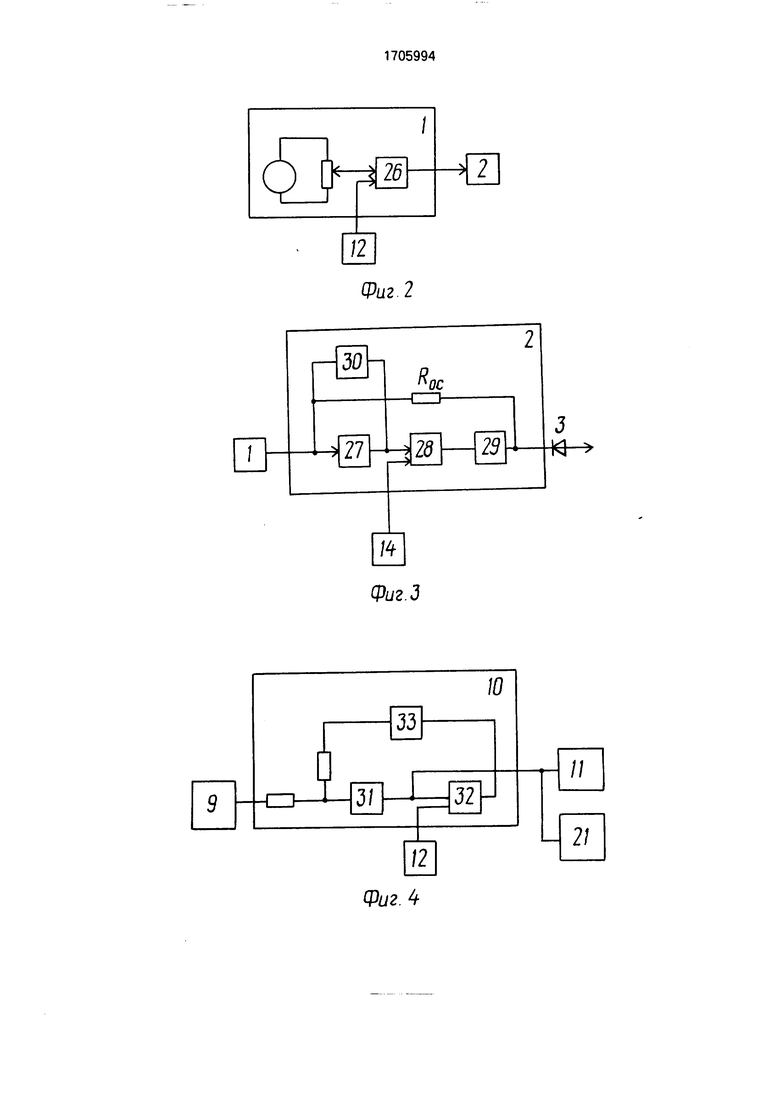
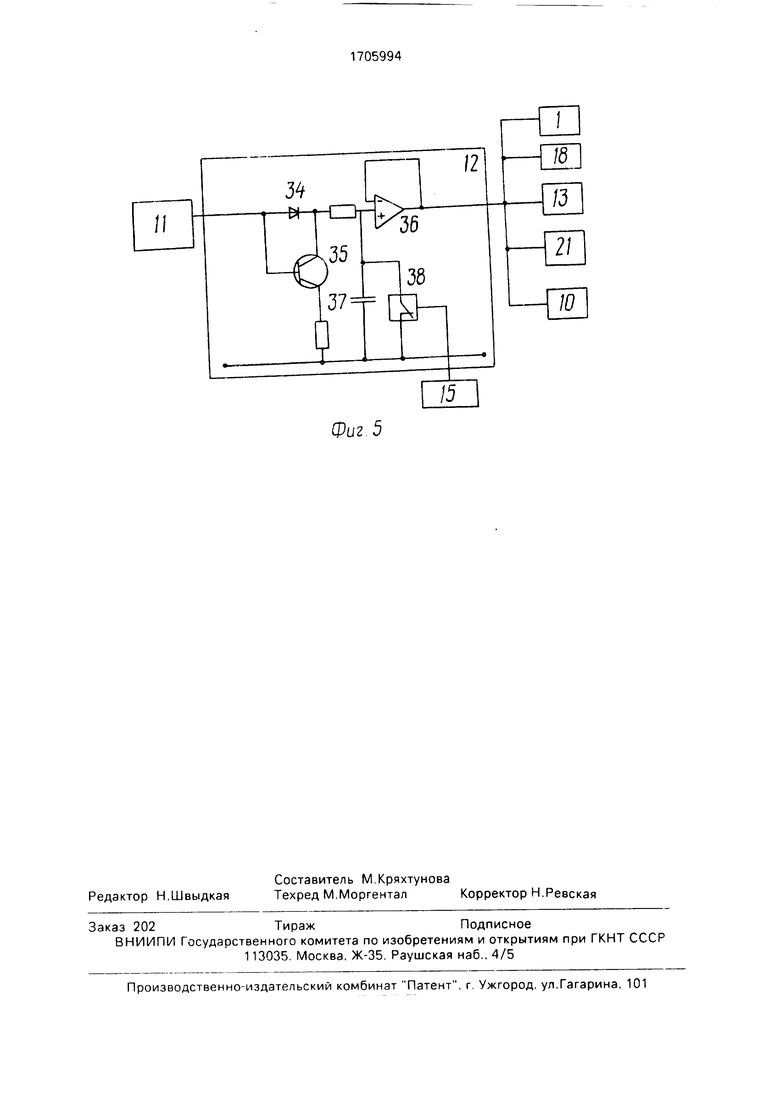
На фиг.1 изображен электропривод для осуществления способа: на фиг.2 - пример выполнения задатчика скорости; на фиг.З - пример выполнения задатчика интенсивности; на фиг.4 - пример выполнения перестраиваемого фильтра нижних частот: на фиг.5 - пример выполнения элемента памяти.
Способ осуществляют следующим образом.
Перед началом каждой из спускоподъемных операций элеватора, свечи или колонны бурильных труб задают с минимальным ускорением минимальную скорость. При этом усилия, измеренные в канзте, содержат статическую составляющую, равную весу груза, и минимальную динамическую, определяемую ускорением и раскачиванием груза на канате. Суммарные усилия фильтруют и выделяют постоянную составляющую усилий, пропорциональную весу груза. Сигнал статических усилий запоминают и по этому сигналу перестраивают полосу пропускания фильтра.
При увеличении груза полоса пропускания фильтра уменьшается, а при уменьшении груза увеличивается. Поэтому при операциях спуска-подъема элеватора и свечи сокращается время, необходимое для определения веса груза, так как частота колебаний каната при подъеме груза уменьшается с увеличением его массы.
По запомненному сигналу веса грузе задают допустимую в зависимости от массы
XI
О
ел ю о
Јь
груза скорость и вычисляют массу груза. Вычисленную массу груза суммируют с сигналом, пропорциональным приведенной к канату массе двигателя и редуктора. При появлении сигнала статических усилий за дают допустимое для каждого режима ускорение, т.е. допустимую интенсивность изменения скорости, в соответствии с уравнением
-
а
т.
где Рдин - заданная допустимая величина динамических усилий, Н;
тА- приведенная суммарная масса груза, каната, редуктора и двигателя, кг;
а - ускорение, м/с2.
При этом при спуске-подъеме малого груза интенсивность увеличивается, а при спуске-подъеме тяжелого груза уменьшается, что позволяет достигнуть максимально возможной для каждого режима производительности. С заданной интенсивностью разгоняют электропривод и в начале процесса разгона отключают вход элемента памяти. В процессе работы непрерывно измеряют разность между измеряемыми усилиями и допустимыми статическими усилиями, выделяя фактические динамические усилия. Полученную разность сравнивают с устав- кой динамических усилий. Если в процессе спуска-подъема элеватора, свечи или колонны бурильных труб происходит зацеп крюка или заклинивание, то величина динамиче- ских усилий превышает уставку динамических усилий и электропривод отключают.
Электропривод содержит последовательно соединенные задатчик 1 скорости, задатчик 2 интенсивности, первый диод 3, регулятор 4 скорости, регулятор 5 тока, вентильный преобразователь 6, электродвигатель 7, редуктор с лебедкой 8, датчик 9 веса груза, перестраиваемый фильтр 10 нижних частот, первый замыкающий ключ 11, эле- мент 12 памяти, второй сумматор 13 и блок 14 деления, подключенный к второму входу задатчика 2 интенсивности. Датчики 15 и 16 скорости и тока подключены к вторым входам соответствующих регуляторов.
Первый блок 17 уставки подключен к входу второго замыкающего ключа 18 и первому компаратору 19, подключенному к управляющему входу блока 20 ограничения момента, который подключен к третьему входу и выходу регулятора 5 тока.
Выход элемента 12 памяти соединен с управляющими входами второго ключа 18 и перестраиваемого фильтра 10 нижних час5
10
15
2025303540 4550
55
тот, с входами задатчика 1 скорости и первого сумматора 21, второй вход которого подключен к выходу перестраиваемого фильтра 10 нижних частот, а выход - к второму вхрду первого компаратора 19.
Выход задатчика 22 начальной скорости соединен с вторым компаратором 23 и через второй диод 24 - с входом регулятора 4 скорости и с вторым входом второго компаратора 23, выход которого соединен с управляющим входом первого ключа 11. Второй блок 25 уставки подключен к второму входу второго сумматора 13, выход ато- рого ключа 18 соединен с вторым входом блока 14 деления, а выход датчика 15 скорости - с управляющим входом элемента 12 памяти.
Задатчик 1 скорости может быть выполнен по известной схеме (фиг.2).
Задатчик 1 скорости содержит источник опорного напряжения, который через потенциометр подключен к входу блока 26 деления, к второму входу которого подключен выход элемента 12 памяти.
Задатчик 2 интенсивности с управляемым ограничением может быть выполнен по известной схеме (фиг.З).
Задатчик 2 интенсивности содержит последовательно включенные усилитель-ограничитель 27, блок 28 умножения и интегратор 29, причем выход интегратора 29 соединен через резистор Roc с входом усилителя-ограничителя 27. В цепи обратной связи блока 27 подключен блок 30 ограничения, второй вход блока 28 умножения соединен с выходом блока 14 деления.
Перестраиваемый фильтр 10 нижних частот может быть выполнен по схеме, изображенной на фиг.4 и содержащей последовательно соединенные интегратор 31, Блок 32 деления и масштабирующий усилитель 33, подключенный к входу интегратора 31. Второй вход блока 32 деления соединен с выходом элемента 12 памяти.
Элемент 12 памяти может быть выполнен по схеме, представленной на фиг.5.
Элемент 12 памяти содержит диод 34, подключенный между базой и эмиттером транзистора 35, операционный усилитель 36, охваченный жесткой обратной связью, неинвертирующий вход которого через резистор подсоединен к диоду 3-1, а параллельно неинвертирующему входу подключены конденсатор 37 и ключ 38 с размыкающим контактом.
Блоки 17 и 25 уставок и задатчик 22 начальной скорости могут быть выполнены в виде управляемых источников опорного напряжения.
Блок 20 ограничения момента может быть выполнен, например, в виде транзистора, подключенного между суммирующей точкой и выходом регулятора тока.
Электропривод работает следующим образом.
После включения электропривода в исходном состоянии потенциометр задатчика скорости выведен. Сигнал датчика 15 скорости равен нулю, поэтому размыкающий ключ 38 элемента 12 памяти замкнут, конденсатор 37 элемента 12 памяти зашу нтиро- ван и выходной сигнал операционного усилителя 36, являющийся выходным сигналом элемента 12 памяти, также равен нулю. Так как на вход блока 26 деления задатчика 1 скорости поступают нулевые сигналы элемента 12 памяти и потенциометра задатчика 1, то его выходной сигнал равен нулю.
Нулевой сигнал элемента 12 памяти поступает также на второй замыкающий ключ 18, выходной сигнал которого поэтому равен нулю. Этот сигнал, являющийся делимым, подается на второй вход блока 14 деления, на первый вход которого через первый сумматор 13 поступает сигнал, пропорциональный приведенной массе электродвигателя и редуктора с второго блока 25 уставки.
Выходной сигнал блока 14деления, равный нулю, подается на вход блока 28 умножения задатчика 2 интенсивности, выходной сигнал интегратора 29 задатчика 2 интенсивности при этом равен нулю. Нулевой сигнал элемента памяти поступает также на управляющий вход перестраиваемого фильтра 10 нижних частот (блок 32 деления).
Перестраиваемый фильтр 10 нижних частот описывается уравнением
Увых UE
1/Ti Р +Wo
где Увых - выходное напряжение фильтра 10;
UBX - входное напряжение фильтра 10;
Ti - постоянная времени интегратора 31,с;
Шо - частота среза фильтра 10. Гц;
Р - оператор дифференцирования.
,, - 1 KlK2
-титгде Ki - коэффициент передачи масштабирующего усилителя 33;
Кз - коэффициент преобразования блока 32 деления;
Ui - выходное напряжение элемент.j 12 памяти.
Так как сигнал элемента 12 памяти равен нулю, то выходной сигнал блока 32 деления. пропорциональный о. рааон максимально возможному в данном блоке напряжению (напряжение питания) т.е. частота среза максимальна, что сос петст.ет минимальному грузу на лебедке
Одновременно сигнал с выходе задатчика 22 начальной скорости поступает на вход второго компаратора 23 и через второй диод 24 - на вход регулятора 4 скорости и на второй вход второго компаратора 23
Сигнал на втором входе компаратора 23 меньше сигнала на первом входе на величину падения напряжения на втором диоде 24. Компаратор 23 срабатывает, и первый замыкающий ключ 11 замкнут.
Сигнал начальной скорости через регуляторы 4 и 5 скорости и тока, вентильный преобразователь б воздействует на электродвигатель 7. Электродвигатель 7 начинает вращаться с малой скоростью, приводя в
движение редуктор с лебедкой 8. Сигнал датчика 15 скорости размыкает ключ 38 элемента 12 памяти.
Сигнал, пропорциональный весу груза. с датчика 9 веса груза поступает на порестраиваемый фильтр 10 нижних частот, где он фильтруется от помех и высокочастотнь колебаний груза (частота среза Шо максимальна). Далее сигнал через замкнутые к н- такты первого ключа 11 и диод 34 элемента
12 памяти заряжает конденсатор 37 до уровня входного напряжения. Этот сигнал через усилитель 36 поступает на выход элемента 12 памяти. Выходной сигнал элемента 12 памяти Ui, пропорциональный весу груза.
поступает на блок 32 деления и уменьшает частоту среза фильтра 10 нижних частот в соответствии с весом груза (при увеличении веса груза частота среза уменьшается, так как частота колебаний груза при увеличении
уменьшается).
При этом время переходного процесса в фильтре 10 определяется частотой колебаний груза. Если в процессе запоминания выходной сигнал фильтра 10 уменьшается,
то за счет падения напряжения на диоди 34 открывается транзистор 35 и конденсатор 37 разряжается через открытый транзистор 35 до уровня входного сигнала.
При появлении на выходе элемента 12
памяти сигнала, пропорционального стлти- ческим усилиям, на выходе второго сумматора 13 формируется сигнал U2. пропорциональный сумме приведенных масс электродвигателя и редуктора и массе
груза. Одновременно замыкаются контакты второго ключа 18 и на второй вход блока 14 деления поступает сигнал первого блока 17 уставки, пропорциональный допустимым для данного бурового станка динамическим усилиям. На выходе блока 14 деления образуется сигнал
II - 3 Кз Рдин Кз
U2К4ГП М
где Кз - масштабный коэффициент первого блока 17 уставки;
М - коэффициент передачи второго сумматора 13;
Ua - выходной сигнал блока 18.
Следовательно, сигнал 1М пропорционален допустимому для каждого режима ускорению, величина которого зависит от массы груза.
Этот сигнал поступает на вход блока 28 умножения задатчика 2 интенсивности.
В то же время сигнал элемента 12 памяти подается на вход блока 26 деления задатчика 1 скорости, на выходе которого формируется сигнал заданной скорости Us. При введении потенциометра задатчика 1 скорости имеем
Us KsUe/Ui,
гдеис - напряжение на выходе потенциометра задатчика 1 скорости;
Kg- коэффициент преобразования блока 26 деления.
При выборе
Ks/UlMHH 1.
где UiMMH - сигнал, пропорциональный минимальному весу груза на крюке, скорость электродвигателя пропорциональна Ue, а при увеличении веса груза заданная скорость уменьшается. Сигнал через усилитель-ограничитель 27 задатчика 2 интенсивности поступает на вход блока 28 умножения, на второй вход которого подается сигнал U4. На выходе интегратора 29 формируется сигнал
U
UsU4 Т2Р
где Ue выходной сигнал усилителя-ограничителя 27, равный выходному сигналу блока 30 ограничения;
Т2 - постоянная времени интегратора 29.
При выборе
KaUs
1 выходное напряК4Т2
жение интегратора 29 изменяется с интенсивностью, равной а, т.е. допустимому
ускорению.
Сигнал на выходе задатчика 2 интенсивности начинает возрастать, его амплитуда становится больше амплитуды сигнала на аноде первого диода 3, который открывзет0 ся, сигнал на втором входе второго компаратора 23 превышает сигнал на его первом входе, устанавливается нулевой выходной сигнал компаратора 23 и размыкается первый ключ 11.
5 В элементе 12 памяти запоминается сигнал, пропорциональный весу груза, что обеспечивает постоянную заданную скорость и постоянное заданное ускорение и постоянную частоту среза перестраиваемого
0 фильтра 10 нижних частот в процессе каждой операции спуска-подъема.
При увеличении сигнала задатчика 2 интенсивности электропривод разгоняется до заданной скорости.
5 В процессе работы выходной сигнал перестраиваемого фильтра 10 нижних частот Ug, пропорциональный измеряемым усилиям в канате, суммируется в первом сумматоре 21 с сигналом Ui. пропорциональным
0 весу груза.
На выходе первого сумматора 21 Формируется сигнал Uio Ug-Ui, пропорциональный динамическим усилиям в канате. Этот сигнал сравнивается с сигналом
5 первого блока 17 уставки на выходе первого компаратора 19. Если в процессе работы происходит заклинивание или другая аварийная ситуация, связанная с возрастанием динамических усилий, то при увеличении
0 сигнала больше сигнала первого блока 17 уставки срабатывает первый компаратор 19, уменьшая сигнал на входе блока 20 ограничения момента и ограничивая выходной сигнал регулятора 5 тока, что приводит к
5 ограничению динамических нагрузок.
При остановке электропривода задат- чик 1 скорости устанавливают в нуль и электропривод тормозится с заданным ускорением. Как только скорость электродви0 гателя становится равной нулю, замыкается ключ 38 элемента 12 памяти и конденсатор 37 разряжается. После разряда конденс.по- ра 37 размыкается второй ключ 18 и электропривод вновь готов к работе.
5 Формула изобретения
параметры электропривода при изменении веса груза и ограничивают электромагнитный момент электродвигателя, отличающийся тем. что, с целью повышения производительности и уменьшения динами- ческих нагрузок при спускоподъемных операциях, в начале каждой операции спуска-подъема элеватора, свечи или колонны бурильных труб задают минимальную постоянную скорость, измеряют, фильтруют и запоминают величину статических усилий в канате, вычисляют приведенную массу груза на канате и изменяют полосу пропускания фильтра, задают допустимые для каждого режима статические усилия и допу- стимые динамические усилия, по окончании процесса взвешивания по заданной величине допустимых динамических усилий и вычисленной массе задают допустимую для каждого режима интенсивность изменения скорости, в процессе работы непрерывно вычисляют разность между измеряемыми усилиями и допустимыми статическими усилиями, сравнивают полученную разность с заданной величиной динамических усилий, при превышении этой разностью величины устэвки динамическихусилий ограничивают момент электродвигателя, а после окончания каждой операции обнуляют значения статических и динамических усилий.
(Риг /
ненный с входом регулятора тока, блок ограничения момента, подключенный между третьим входом и выходом регулятора тока, последовательно включенные редуктор с лебедкой и датчик веса груза, сумматор, о т- личающееся тем, что, с целью повышения производительности и уменьшения динамических нагрузок при спускоподъемных операциях, в него дополнительно введены последовательно соединенные перестраиваемый фильтр нижних частот, первый ключ, элемент памяти, второй сумматор и блок деления, подключенный к второму входу задатчика интенсивности, два компаратора, второй ключ и первый блок уставки, подключенный к входу первого компаратора и через второй ключ - к второму входу блока деления, второй блок уставки, соединенный с вторым входом второго сумматора, выход элемента памяти подключен к управляющим входам перестраиваемого фильтра нижних частот, задатчика скорости и второго ключа, а через первый сумматор - к второму входу первого компаратора, выход которого соединен с управляющим входом блока ограничения момента, задатчик интенсивности через диод подключен к входу регулятора скорости, задатчик начальной скорости - к первому входу второго компаратора и через второй диод - к входу регулятора скорости и к второму входу второго компаратора, выход которого соединен с управляющим входом первого ключа, выход перестраиваемого фильтра нижних частот подключен также к второму входу первого сумматора, датчик скорости - к управляющему входу элемента памяти, а вход перестраиваемого фильтра нижних частот - к датчику веса груза.
Фиг.2
I
R
ОС
2д
3
&-
Фиг.З
Фиг А
Фиг. 5
| Вентильный электропривод постоянного тока буровой лебедки | 1984 |
|
SU1192092A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
