00 00
Изобретение относится к технике оптических устройств для управления направлением световых лучей, а более конкретно к оптико-механическим устройствам для сканирования световых лучей в пространстве и предназначе- 5 но для измерения бесконтактным методом параметров вибрации плоских поверхностей изделий и коммутации световодных каналов.
Известно оптико-механическое ска- 10 нирующое устройство, содержащее развертывающий барабан/ вращаемый электродвигателем, фотоэлектрический . датчик с диафрагмой, где указанный барабан выполнен в виде волоконного 5 трансформатора изображения с цилиндрической поверхностью, на которой .ступенчато закреплены концы световодных волокон, другие концы этих волокон закреплены на торце барабана и jn расположены на окружности, концентричной оси вращения, а вблизи торца ба-. рабана .установлен указанньой фотоэлектрический датчик о диафрагмой, центр отверстия которой совпадает с окруж- 25 ностью вращения волокон
Однако это устройство «е обеспе чявает измерение параметров вибрации, .кроме того, не оканирование изображения контзррлируемого объекта по двум координатам по при- чине его фокусировки на образующую цилиндрического барабана и ограничиБается время активной передачи информации по причинеугловых поворо тов световодов tSaQa6aHa относитесь- 35 но плоскости сканирующего изображег кия в пределах номинального апертурного угла световода.
Наиболее близким к предлагаемому по технической сущности и достигае- 40 мому результату является оптикомеханическое сканирующее устройство, содержащее два оптически связанных набора световодов, объектив, оптически связанный с первым набором, 5 два приемника оптического излучения Сгз. ;, ; , . Однако это устройство не обеспечивает измерение параметров вибрации, кроме того, сканирование изоб- -.. ражения этого объекта осуществляется аи одной координате, имеют место . . яопойнйтельные потери при передаче световой энергии между набором световодов по причине увеличений рас- стояния между Нш«и на; толщину враща- 55 кадагося диска.; ; . , - ;, / . . Целью изобретения является ббес . печение измерения параметров вибра-; 1(ии контролируемого объекта дутем сканирования по координатам ёэто не- 60 подвижной поверхно&ти, а также уьюньшенйя потерь при передаче световой
энертйи.. . , . - - - : , . , , .
Доставленная цель достигается тем, что в оптико-механическое сканир5 - 5
щее устройство, содержащее два оптически связанных набора световодов, объектив, оптически связ&нный с первым набором, два приемника оптического излучения, введены источник зондирующего излучения, блок обработки информации, двигател5Ь, отдельный световод и линза/ причем источник зондирующего излучения и первый приемник оптического излучения оптически связаны через линзу с одним концом отдельного световода, другой конец которого оптически связан с одним иэ входных концов световодов второго набора/ при этом второй на.бор соединен с двигателем, входные концы световодов первого и второго наборов расположены на окружностях, концентричных оси вращения через один угловой шаг, соответствующие выходные концы второго набора расположены на окружностях/ концентричных оси вращения, через два угловых лаага, ПРИ этом один из выходных коншов первого набора оптически связан со BTOpbwприемником оптического излучения а остальные размещены в вид прямоугольной матрицы/ приемник оптического излучения электрически соединен с блоком обработки информации, а блок обработки информации электрически соединен с первым приемником оптического излучения.
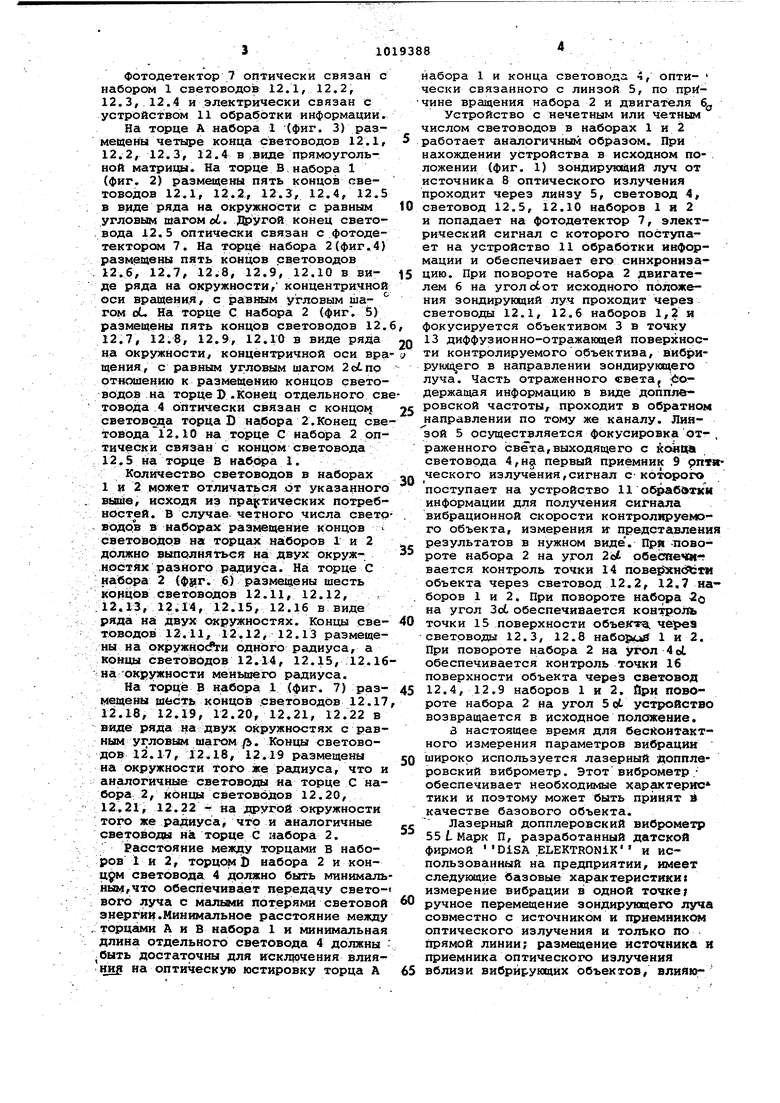
На фиг. 1 изображена блок-схема оптико-механического сканирующего yCTpwicTisa; на фиг. 2 - схема размещения входных концов световодов первого набора; на фиг. 3 - схема размещения выходных концов световодов первого набора; на фиг. 4 - схема размещения входных концов световодов второго набора; на фиг. 5 - схема разме|цения верхних концов соответственно первого и второго наборов пр четнсм числе световодов.
ОпТико- механическое сканирующее устройство состоит из первого набора 1 световодов, второго набора 2 световолов, объектива 3 отдельного светойода 4, лкнзы 5, двигателя б, второго приемника 7 оптического излучения (фотодетектора), источника 8 оптического излучения первого и приемника 9 оптического излучения. Источник 8 оптического излучения и приемник оптического излучения Оптически связаны через линзу 5 с одним концом световода 4, а другой конец .световода оптически связан с одНич из световодов торцаЦ набора 2 Набор 2 соединен с двигателем б. Торец набора 2 оптически связан с торцом 0 набора 1. Торец А набора 1 оптически связан с объективом 3, который рптически связан с диффузионно-отражающей пов хностью контролируемого объектива 10.
Фотодетектор 7 оптически связан с набором 1 световодов 12.1, 12.2, 12.3, 12.4 и электрически связан с устройством 11 обработки информации.
На торце А набора 1 (фиг. 3) размещены четыре конца световодов 12.1, 5 12.2, 12.3, 12.4 в виде прямоугольной матрицы. На торце В,набора 1 (фиг. 2) размещены пять концов световодов 12.1, 12.2, 12.3, 12.4, 12.5 в виде ряда на окружности с равным 10 угловым шагом oi. ДОугой конец световода 12.5 оптически связан с фотодетектором 7 . На торце набора 2(фиг.4) размещены пять световодов
12.6,12.7, 12.8, 12.9, 12.10 в ви- 5 де ряда на окружности, концентричной оси вращения, с равным угловым ша- / гом oL На торце С набора 2 (фиг . 5) размещены пять концов световодов 12.6,
12.7,12.8, 12.9, 12.10 в виде ряда jQ на окружности, концентричной оси вра- щения, с равным угловым шагом 2tJLn отношению к размещению концов световодов на торце D.Конец отдельного световода 4 оптически связан с концом 25 световода торца D HaiBopa 2.Конец световода12. 10 на торце С набора 2 оптич ски связан с концом световода
12.5 на тсфце В набега 1.
Количество световодов в наборах «О 1 Н 2 может отличаться от указанного Bbmaie, исходя из прартических потребностей. В случае че; рного числа светр- . водов в наборах размещение концов световодов на торцах на боров 1 и 2 должно выполняться на двух окруж 35 ностйк разного радиуса. На торце С набора 2 (. 6) размещены шесть концов световодов 12.11, 12.12, 12,13, 12.14, 12.15, 12.16 в виде ряда на двух окр1гасностях. Концы све- 40 товодов 12.Ilji2.12 12.13 размещены на окружноЛи одного радиуса, а концы световодов 12.14, 12.15, 12.16наокр5шности меньшего радиуса.
На торце В набора 1 (фиг. 7) раз- 45 мещеныш сть концов световодов 12.17, 12.18, 12.19, 12.20, 12.21, 12/22 в Виде ряда на двух окружностях с равным угловым Шагом /S. Концы световодов 12. 17, 12,18, 12.19 размещены «О на окружности то1Ч же радиуса, что и аналогичные световоды на торце С набора 2, концы световодов 12.20, 12.21, 12.22 -г на другой окружности того же радиуса что и аналогичные световоды на торце С набора 2.
Расстояние между торцами в наборов 1 и 2, торцом Ь набора 2 и конЦ9М световода 4 должно быть минимгшьным,что обеспечивгмгт передачу свето- вого луча с машлми потерями световой 60
энергии.Минимгшьное расстояние между
торцг|ми А и В набора 1 и минимальная
длина отдельного световода 4 должны быть достаточны для исключения влияниз на оптическую юстировку торца А 65
набора 1 и конца световода 4, оптически связанного с линзой 5, по npriчине вращения набора 2 и двигателя 6
Устройство с нечетным или четным числом световодов в наборах 1 и 2 работает аналогичным образом. При нахождении устройства в исходном положении (фиг. 1) зондирующий луч от источника 8 оптического излучения проходит через линзу 5, световод 4, световод 12.5, 12.10 наборов 1 и 2 и попадает на фотодетектор 7, электрический сигнал с которого поступает на устройство 11 обработки информации и обеспечивает его синхронизацию. При повороте набора 2 двигателем 6 на уголoioT исходного пбложения зондирующий луч проходит через световоды 12.1, 12.6 наборов 1,2 и фокусируется объективом 3 в точку 13 диффузионно-отражающей поверхности контролируемого объектива, в ибрируюЦего в направлении зондирующего луча. Часть отрешенного «BeTaj juoдержащая информацию в виде доппле ровской частоты, проходит в обратном направлении по тому же каналу. Линэой 5 осуществляется фокусировка отраженного света,выходящего с &о«1 световода 4,н§1 первый приемник 9 рп ческого излучения,сигнал с которого поступает на устройство 11 ос абдххи информации для получения сигнгша вибрационной скорости контролируемо го объекта, измерения и- представлени результатов в нужном виде . При -повороте набора 2 на угол 2oi обеСПеЧНГ вается контроль точки 14 пове{$хнсй:1ги объекта через световод 12.2, 12.7 наборов 1 и 2. При повороте набора 2о на угол Зоб обеспечивается контроль точки 15 поверхности объектга. череЭ световоды 12.3, 12.8 набор| 10 1 и 2. При повороте набора 2 на угол 4oL обеспечивается контроль точки 16 поверхности объекта через световод 12.4, 12,9 наборов 1 и 2. Йри повороте набора 2 на угол 5 oL устройство возвращается в исходное положение.
3 настоящее время для бесйонтактного измерения параметров вибрации широко используется лазерный -допплеровский виброметр. Этот виброметр/ обеспечивает необходимые характерис тики и поэтому может быть принят и качестве базового объекта.
Лазерный допплеровский виброметр 55LМарк П, разработанный датской фирмой DiSA ELEKTRONiK и использованный на предприятии, имеет следующие базовые харбистеристики измерение вибрации в одной точке; ручное перемещение зондирунхцего луча совместно с источником и приемником оптического излучения и только по прямой линии; размещение источника я приемника оптического излучения вблизи вибрирующих объектов, влияюUiee на возможность и, точность измерений за счет высокой чу&ствительности к смещению оптических элементов.
Предлагаемое изобретение обеспечивает новые функциональные возможности и имеет следунхцие технические характеристики: автоматическое с разделением по времени измерение вибрации плоских поверхностей во многих точка ; автоматическое сканирование зондирующегоИ отраженного луча при неподвижном источнике и приемнике оптического излучения; синхронизация работа устройства обработки информации со сканированием зондирующего луча; размещение источника и приемника оптического излучения вдали от вибрирующих объектов, уменьшающее вЛИЯние вибрации на возможность и точность измерений за счет высокой чувствительности к смещению оптических элементов.
При этом остальные показатели устройства по сравнению с базовым не ухудшились.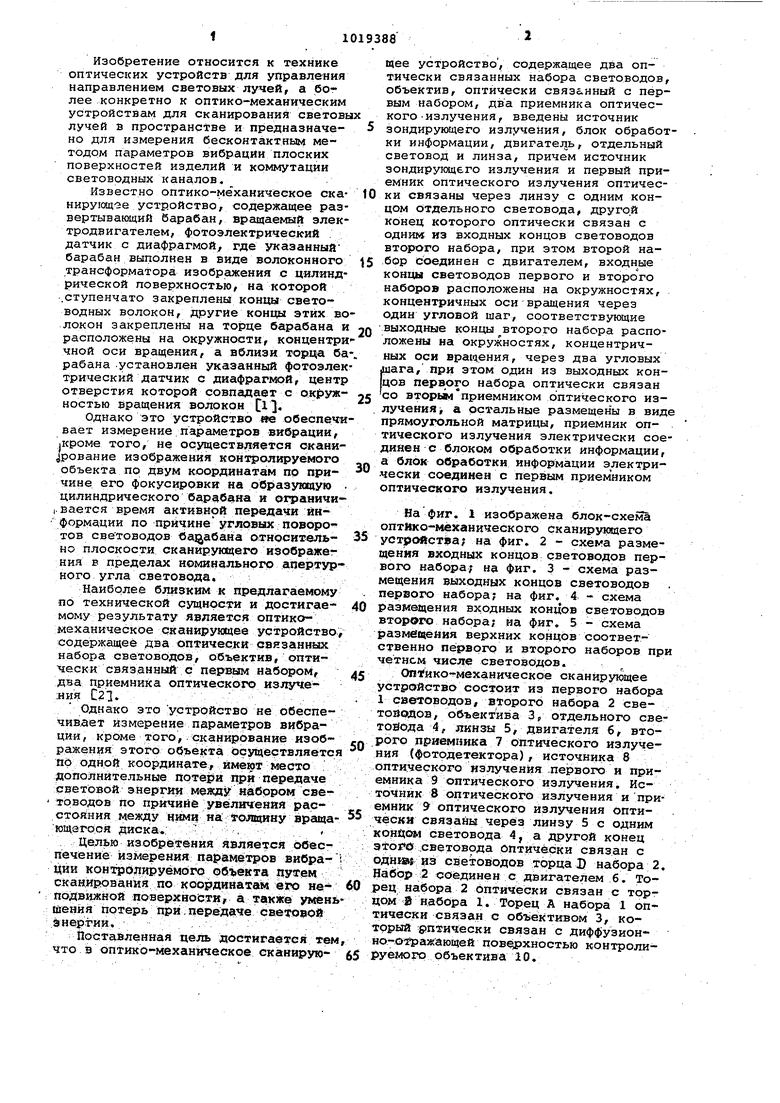
| название | год | авторы | номер документа |
|---|---|---|---|
| Активная головка самонаведения | 2018 |
|
RU2689276C1 |
| СПОСОБ НАВЕДЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИЕМОПЕРЕДАТЧИКОВ АТМОСФЕРНОЙ ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2774839C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| СПОСОБ И УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 2005 |
|
RU2303279C1 |
| Устройство для оптического определения размеров и числа взвешенных частиц | 1988 |
|
SU1743371A3 |
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ | 2014 |
|
RU2562614C1 |
| ПОЛУПРОВОДНИКОВЫЙ ЛАЗЕР С ОПТИЧЕСКОЙ НАКАЧКОЙ | 1993 |
|
RU2047935C1 |
| СИСТЕМА ОТКРЫТОЙ ОПТИЧЕСКОЙ СВЯЗИ | 2001 |
|
RU2212763C2 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ТРЕХМЕРНЫХ МИКРООБЪЕКТОВ И МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2145109C1 |
| Фотометрическая установка для регистрации быстропротекающих процессов | 1988 |
|
SU1562713A1 |
От ИКр-МБХАНЙЧЕСКОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО, содержащее два оптич С.ки связанных набора св&товодов, объективj оптически :свяьанный с первым набором, дв.а приемника оп- ;: тического излучения-, О т л и ч а ющ е ,е с я тем, что/ с целью обеспе- . чения измерения параметров вибрации крйтролируемогр сйъекта путем сканирова«ия по координатам его неподвижной поверхности,, в него введены источник зондирующего излучения, блок обработки информации, двигатель, -отдельный рветрвод и линза, причем источник зондирующего излучения и первый приемник оптического излучения оптически связаны через линзу с одним конусом Отдельного световода, другой конец которого оптически свя,зан с одним из входных концов световодов второго набора, при этом-вто. рой набор соединен с двигателем, входные концы световодов первого и второ ю наборов расположены на окружностях, концентричных оси вращения, через один угловой шаг, соотвётствукяцие выходные концы второго набора расположёны на. окружностях, концентричных оси вращения, через два угловых шага, при этом один кз выходных концов.первого набора оптически связан со вторым приемником оптического излучения, а остальные (/ размещены в виде прямоугольной мат.рицы, приемник оптического излучения электвяческй соединен с блоком ; обработки информации,: а блок, обработки информации электрически соедй- g . первым приемником оптического излучен-ия.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU175997A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент-США 4212516, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| опублик | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
