Изобретение относится к активным головкам самонаведения и может быть использовано в качестве бортового элемента летательных аппаратов (ЛА), как средство наведения ЛА на воздушные цели.
Известна активная головка самонаведения /патент US 4383663/ с возможностью работы на частотах от ультрафиолетового до инфракрасного диапазона электромагнитных волн, содержащая корпус, внутри которого установлены входная оптическая система линз, блок источников излучения, а так же, соединенное через плату аналоговой обработки сигналов с платой цифровой обработки, соединенной по управляющему выходу с блок источников излучения, а по сигнальному выходу с выходной шиной головки самонаведения (ГСН).
При этом оптическая система линз выполнена с механическим сканированием луча путем вращения призмы вокруг продольной оси ГСН.
Недостатком известной активной головки самонаведения являются пониженная надежность работы ГСН, связанная с вращением призмы и наличием привода её вращения.
Задачей изобретения и его техническим результатом является повышение надежности работы ГСН.
Сущность изобретения.
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что активная головка самонаведения содержит корпус, на внешней поверхности которого установлены флюгарки с датчиками их углового положения. Внутри корпуса установлены блок источников излучения и оптическая система линз с полосовым оптическим фильтром. Фильтр установлен после оптической системы линз перед фотоприемным устройством. Фотоприемное устройство выполнено в виде решетки фотоприемников, установленных перед передней фокальной плоскостью оптической системы. Выходы фотоприемников соединены с платой аналоговой обработки сигналов. Плата содержит последовательно соединенные блок операционных усилителей и блок пиковых детекторов. Выходы пиковых детекторов соединены с платой цифровой обработки сигналов. Плата цифровой обработки сигналов содержит многоканальный аналогово-цифровой преобразователь, компаратор и электронно-вычислительную машину (ЭВМ). Вторые сигнальные входы ЭВМ соединены с сенсорными датчиками углового положения флюгарок, а управляющий выход ЭВМ соединен через генератор сильноточных импульсов с входами блока источников излучения. Сигнальный выход ЭВМ соединен с выходной шиной головки самонаведения (ГСН).
Такое конструктивное выполнение активной ГСН позволяет исключить громоздкие и малонадежные средства электромеханического сканирования. Следствием этого является повышение надежности работы ГСН и достижение заявленного технического результата. Дополнительно резко снижаются массогабаритные характеристики активной ГСН.
Сущность изобретения поясняется рисунками, представленными на фиг. 1 - фиг. 8.
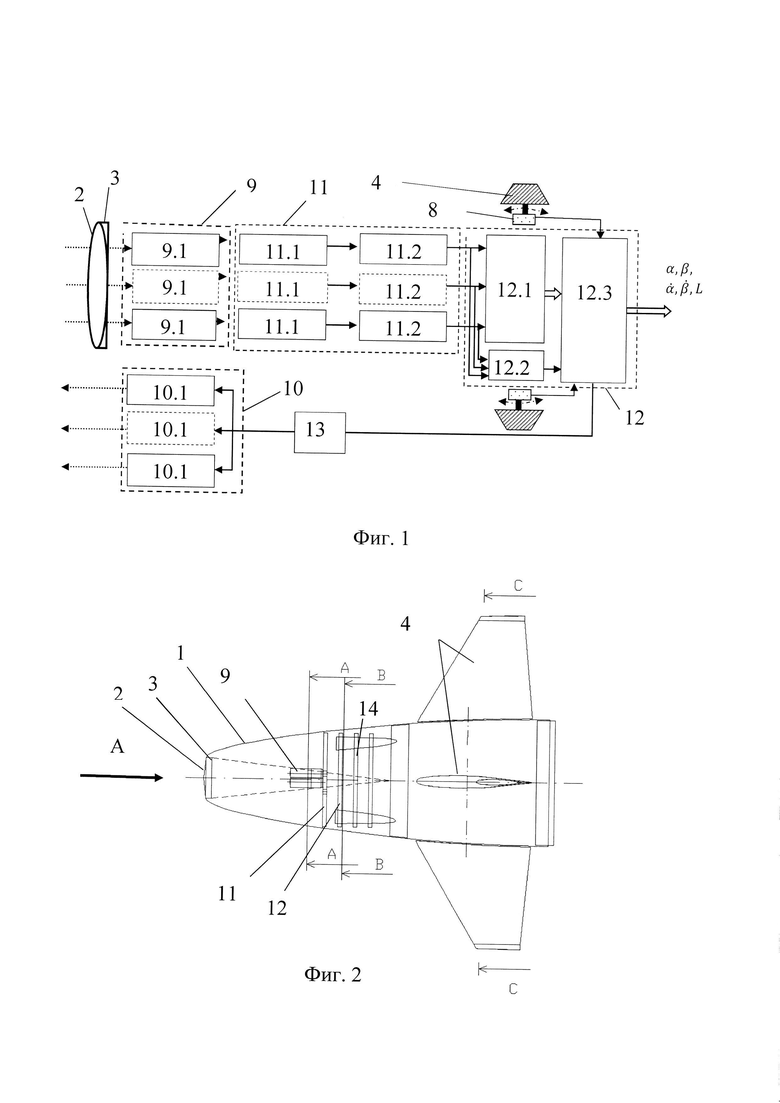
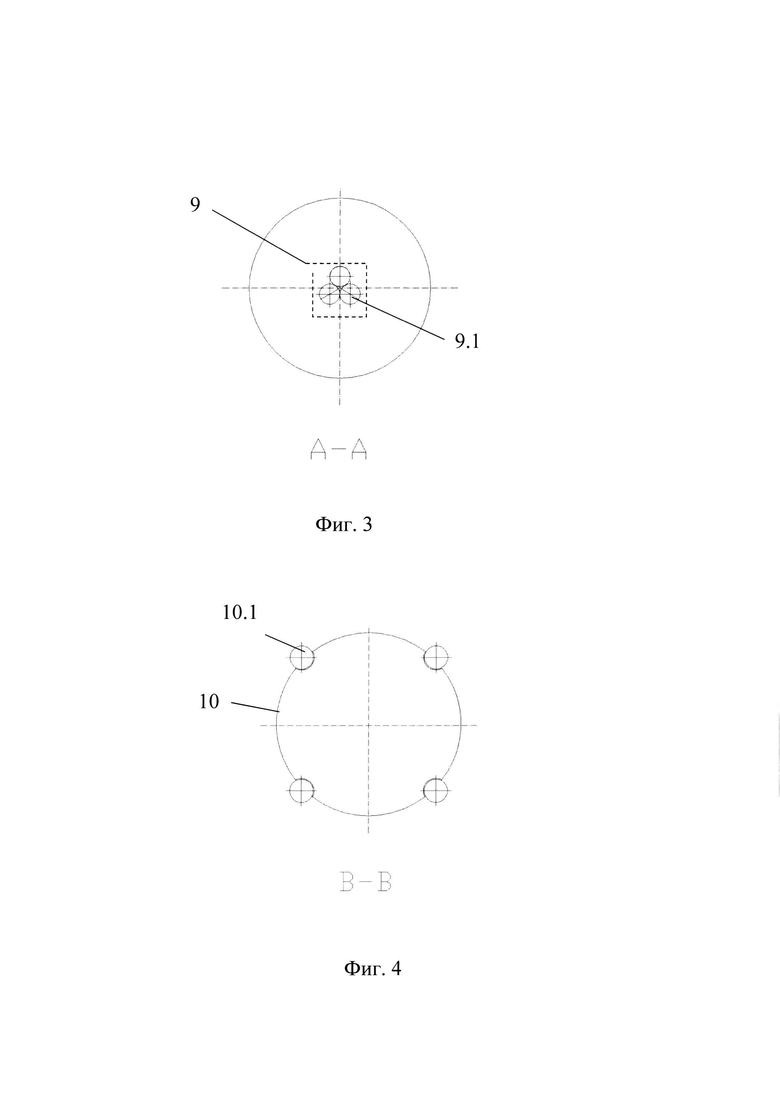
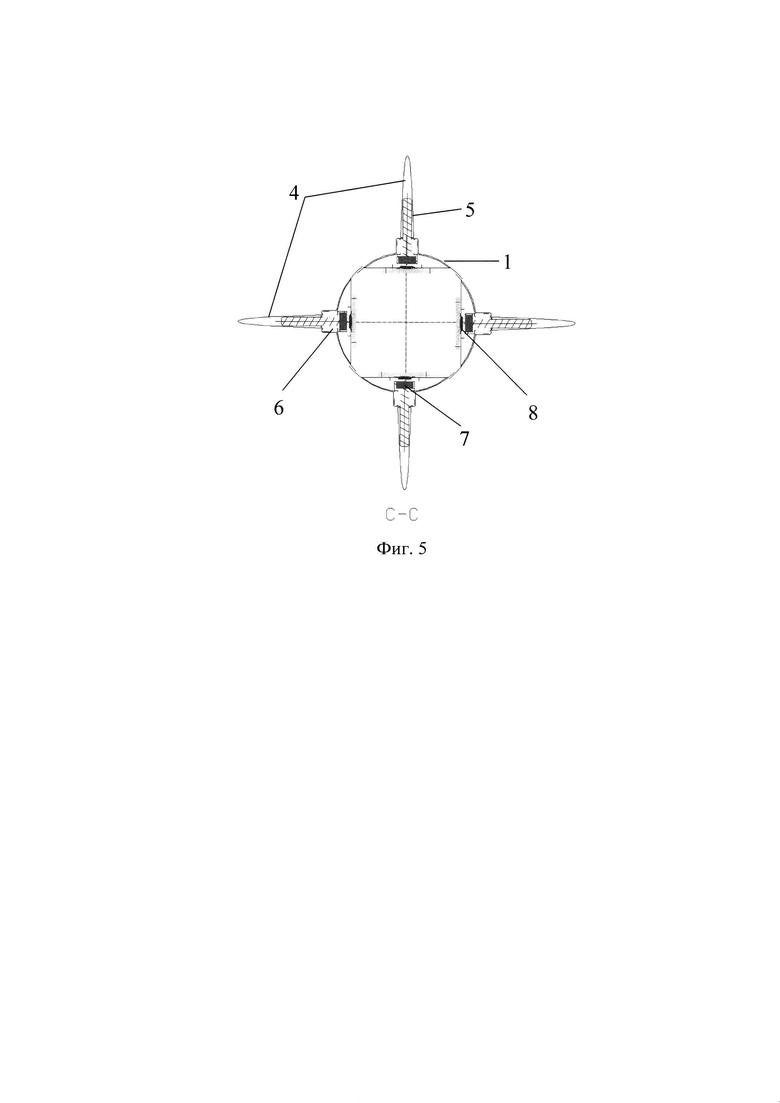
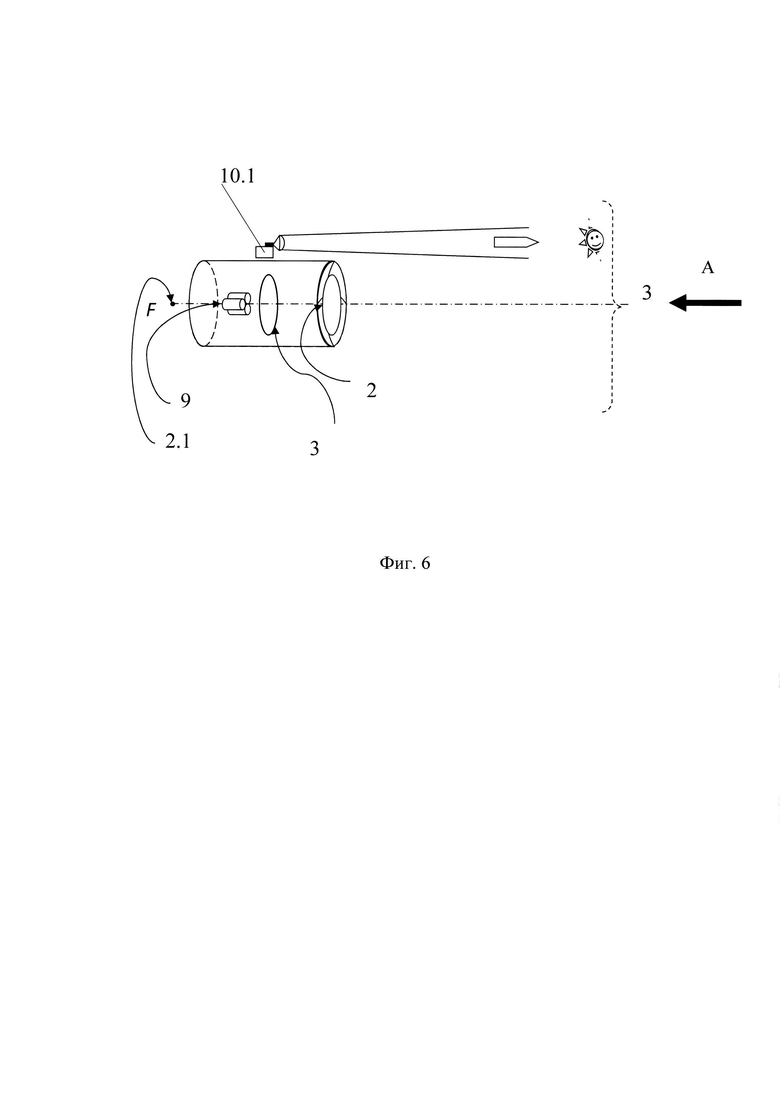
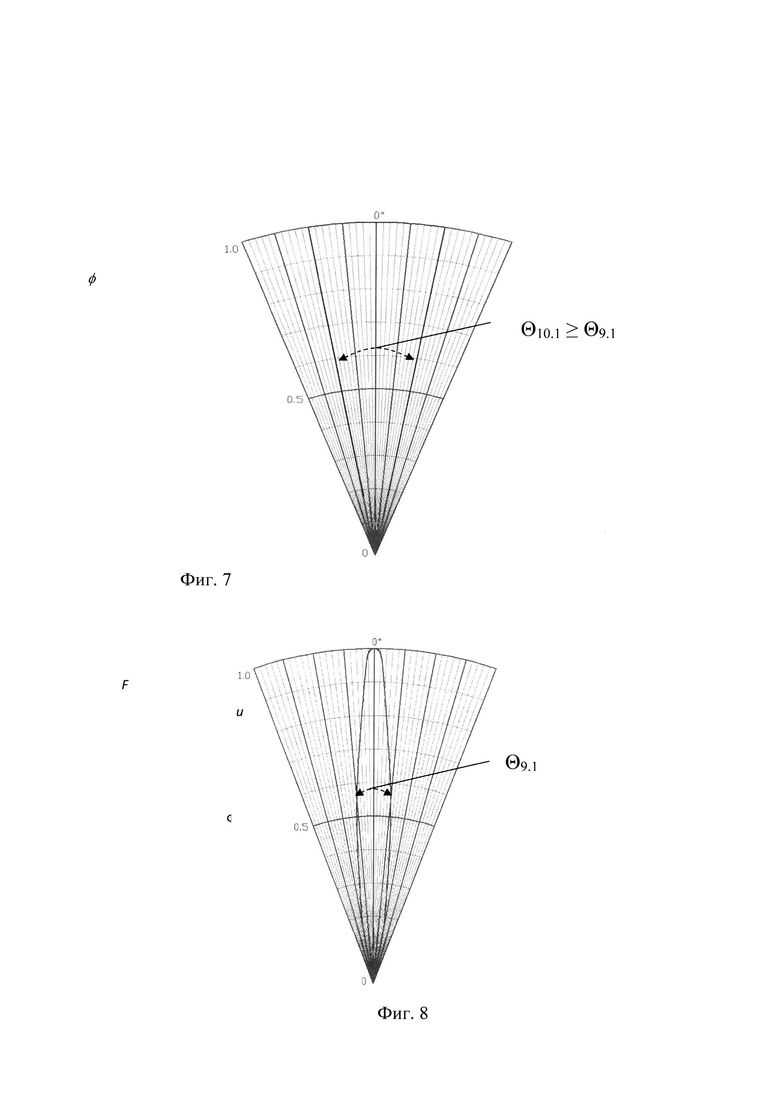
На фигуре 1 представлена функциональная схема активной головки самонаведения (ГСН), на фигуре 2 - рисунок, поясняющий конструкцию активной ГСН, на фигуре 3 - вид фотоприемников в сечении А-А, на фигуре 4 - вид излучателей в сечении В-В, на фигуре 5 - сечение С-С ГСН по осям вращения флюгарок, на фиг. 6 - рисунок, поясняющий устройство оптической системы ГСН, на фиг. 7 - нормированная диаграмма плотности мощности импульсного источника, на фиг. 8 - нормированная диаграмма чувствительности фотоприемника решетки.
На фиг. 1 - фиг. 8 обозначены:
1 - корпус головки самонаведение (ГСН);
2 - входная оптическая система линз;
2.1 - фокус оптической системы 2;
3 - входной полосовой оптический фильтр;
4 - флюгарки;
5 - оси вращения флюгарок;
6 - подшипник вращения;
7 - магнит датчика углового положения флюгарок;
8 - сенсор датчика углового положения флюгарок (датчики на принципе Холла)
9 - решетка фотоприемников;
9.1 - фотоприемник;
10 - блок источников излучения верхнего инфракрасного (ИК) диапазона;
10.1 - источник излучения (лазер);
11 - плата аналоговой обработки сигналов фотоприемников;
11.1 - операционный усилитель;
11.2 - пиковый детектор;
12 - плата цифровой обработки;
12.1 - многоканальный аналого-цифровой преобразователь;
12. 2 - компаратор;
12.3 - электронно-вычислительная машина (ЭВМ) обработки сигналов;
13 - генератор (формирователь) сильноточных импульсов;
14 - плата электропитания.
Активная головка самонаведения содержит корпус 1, на внешней поверхности которого установлены флюгарки 4 с датчиками 8 их углового положения. Внутри корпуса 1 установлены блок 10 источников излучения 10.1 и оптическая система 2 линз с полосовым оптическим фильтром 3. Фильтр 3 установлен после оптической системы 2 линз перед фотоприемным устройством. Фотоприемное устройство выполнено в виде решетки 9 фотоприемников 9.1, установленных перед передней фокальной плоскостью оптической системы 2. Угловой размер Θ10.1 нормированной диаграммы углового распределения плотности мощности F излучения импульсных источников 10.1 подсветки представлен на фиг. 7, а угловой размер Θ9.1 нормированной диаграммы углового распределения чувствительности U фотоприемников 9.1 - на фиг 8. Источники 10.1 выполнены расколлимированными, то есть имеют расширенную диаграмму направленности, при этом Θ10.1 ≥ Θ9.1.
Выходы фотоприёмников 9.1 соединены с платой 11 аналоговой обработки сигналов. Плата 11 содержит последовательно соединенные блок операционных усилителей 11.1 и блок пиковых детекторов 11.2. Выходы пиковых детекторов 11.2 соединены с платой 12 цифровой обработки сигналов. Плата 12 цифровой обработки сигналов содержит многоканальный аналогово-цифровой преобразователь 12.1, компаратор 12.2 и электронно-вычислительную машину (ЭВМ) 12.3. Вторые сигнальные входы ЭВМ 12.3 соединены с сенсорными датчиками 8 углового положения флюгарок 4, а управляющий выход ЭВМ 12.3 соединен через генератор 13 сильноточных импульсов с входами блока 10 источников излучения 10.1. Блок 10 импульсных источников содержит не менее одного импульсного источника 10.1 подсветки цели, а решетка 9 - не менее трех фотоприемников 9.1. ЭВМ 12.3 обработки сигналов выполнена на основе ARM (Advanced RISC Machine) архитектуры с математическим сопроцессором на общем кристалле.
Сигнальный выход ЭВМ 12.3 соединен с выходной шиной головки самонаведения (ГСН).
Выходными сигналами ЭВМ 12.3 являются:
- текущие значения угловых положений цели в азимутальной α и угломестной β плоскостях;
- относительным угловым скоростям  ,
,  в соответствующих плоскостях;
в соответствующих плоскостях;
- текущая дальность L до цели.
Активная головка самонаведения работает следующим образом.
По заданной программе управления измерением координат воздушных объектов, заложенной в память ЭВМ 12.3 с заданным периодом обновления передает на формирователь 13 требуемые параметры зондирующих импульсов. Формирователь 13 генерирует модулирующие импульсы амплитудой Uи, длительностью τи и периодом следования Ти. Далее указанные импульсы подаются на излучатели 10.1 блока 10 импульсных источников для подсветки цели. Под действием этих импульсов излучатели 10.1 блока 10 излучают электромагнитные волны в заданном диапазоне электромагнитных волн (ЭМВ). Далее эти ЭМВ излучаются в пространство с заданным угловым размером Θ10.1 в двух ортогональных плоскостях. При встрече с воздушной целью зондирующие ЭМВ отражаются от воздушной цели в виде отраженных «эхосигналов». Эхосигналы принимаются входной оптической системой 2. Принятые сигналы проходят через полосовой узкополосный фильтр 3 и попадают на фотоприемники 9.1 решетки 9 в расфокусированном виде. Из-за того, что решетка 9 фотоприемников 9.1 расположена перед фокальной плоскостью 2.1 создается возможность распределения мощности принятых сигналов на решетке 10 фотоприемников 10.1 как функции углового положения воздушной цели относительно оптической оси ГСН. Далее принятое распределение плотности мощности сигналов на решетке 9 фотоприемников 9.1 усиливается усилителями 11.1, детектируется пиковыми детекторами 11.2, и в виде аналоговых сигналов поступает на многоканальный аналого-цифровой преобразователь (АЦП) 12.1 и на компаратор 12.2. АЦП 12.1 преобразует поступившие от пиковых детекторов 11.2 аналоговые сигналы в цифровую форму и передает их в ЭВМ 12.3 для вычисления угловых координат и угловых скоростей. Одновременно компаратор 12.2 принимает поступившие от пиковых детекторов 11.2 аналоговые сигналы и передает их в ЭВМ 12.3 для точного измерения дальности до воздушной цели.
ЭВМ 12.3 на основании принятых сигналов формирует оптимальные параметры зондирующих импульсов - длительность τopt и период Тopt их следования. Эти параметры подаются на генератор - формирователь 13 сильноточных импульсов. Под действием этих импульсов источники 4.1 излучают очередные зондирующие ЭМВ. Далее приемо-передающий процесс циклически повторяется N раз до заданного уровня накопления, обеспечивающего требуемую точность измерения параметров воздушной цели.
Одновременно ЭВМ 12.3 измеряет текущую дальность L до цели в соответствии с выражением:
 (1)
(1)
где:
τ - временная разница между моментами выдачи сигналов зондирования и моментом прихода ответных от цели эхо-сигналов.
 - фиксированная задержка, учитывающая время формирования излучаемого фронта зондирующего сигнала и шумовой сдвиг срабатывания пикового детектора 11.2 от пришедшего эхо-сигнала;
- фиксированная задержка, учитывающая время формирования излучаемого фронта зондирующего сигнала и шумовой сдвиг срабатывания пикового детектора 11.2 от пришедшего эхо-сигнала;
с - скорость света.
Одновременно с измерением дальности L до цели и углов α, β ЭВМ 12.3 измеряет  = f(φ) - уровень j-го принятого эхо-сигнала от каждого i-го фотоприемника 9.1 решетки 9.
= f(φ) - уровень j-го принятого эхо-сигнала от каждого i-го фотоприемника 9.1 решетки 9.
Измеренные уровни сигнала накапливаются и усредняются в ЭВМ 12.3 по времени по следующей формуле:
 , (2)
, (2)
где:
N - число импульсов для осреднения в зависимости от режима может изменяться от 10 (1мс) до 10000 за измерительный цикл.
При этом соотношение сигал - шум каждого приемного канала пропорционально величине  .
.
Таким образом, происходит обработка сигналов  фотоприемников 9.1.
фотоприемников 9.1.
Далее по разностным величинам между и опорным минимальным сигналом Umin, которые проецируются на ортогональные оси системы координат ГСН (на фигурах не показано), определяются углы места α и азимутальный угол β воздушной цели из выражений:
 ; (3)
; (3)
 , (4)
, (4)
где:
n - количество фотоприемников 9.1 в решетке 9;
 - коэффициент пропорциональности для угла места, получаемый при калибровке ГСН на стенде;
- коэффициент пропорциональности для угла места, получаемый при калибровке ГСН на стенде;
 - коэффициент пропорциональности для азимутального угла, получаемый при калибровке ГСН на стенде;
- коэффициент пропорциональности для азимутального угла, получаемый при калибровке ГСН на стенде;
 - геометрическое вертикальное смещение i-го приемника 9.1 в решетке 9 относительно приемника с минимальным сигналом;
- геометрическое вертикальное смещение i-го приемника 9.1 в решетке 9 относительно приемника с минимальным сигналом;
 - геометрическое горизонтальное смещение i-го приемника 9.1 в решетке 9 относительно приемника с минимальным сигналом.
- геометрическое горизонтальное смещение i-го приемника 9.1 в решетке 9 относительно приемника с минимальным сигналом.
Одновременно с измерением величин α, β, L измеряются угловые скорости и перемещения цели из выражений:
 ; (5)
; (5)
 (6)
(6)
где:
 - значения угла места на предыдущем измерительном цикле;
- значения угла места на предыдущем измерительном цикле;
 - значения азимутального угла предыдущем измерительном цикле;
- значения азимутального угла предыдущем измерительном цикле;
 - временной интервал между измерительными циклами;
- временной интервал между измерительными циклами;
N - количество последовательно излученных импульсными источниками 10.1. блока 10 зондирующих импульсов за измерительный цикл.
Измеренные значения координат воздушной цели α, β, , и L далее передаются через выводное устройство ЭВМ 12.3 на выходную шину ГСН.
Одновременно мгновенные угловые положения флюгарок 4, определяющие аэродинамические углы атаки и скольжения, измеряются датчиками 8 и передаются в ЭВМ 12.3. ЭВМ 12.3 вносит поправку в измеренные значения углов α и β (3-4). Тем самым компенсируется угловые колебания носителя ГСН, вызванные неоднородностью атмосферы и низкочастотными автоколебаниями носителя ГСН.
Данное изобретение не ограничивается приведенным выше примером его осуществления.
В рамках данного описания изобретения возможны и другие варианты его конструкции.
Так, например, для усиления входного потока ЭМВ и формирования общей диаграммы направленности решетки 9 фотоприемников 9.1 в ГСН может использоваться, как линзовая система, простая коллимационная (без усиления входного потока ЭМВ), так и система из криволинейных зеркал (рефлекторная оптическая система), позволяющая увеличить дальность обнаружения и измерения координат целей ГСН.
Кроме того для измерения аэродинамических углов атаки и скольжения могут дополнительно использоваться приемники статического давления воздуха, расположенные по периметру корпуса ГСН. В качестве датчиков угловых положений флюгарок могут быть использованы не только датчики Холла, но и оптические, емкостные и резистивные датчики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптоэлектронный измеритель координат воздушных целей | 2018 |
|
RU2674563C1 |
| Самонаводящаяся электроракета | 2018 |
|
RU2686550C1 |
| Способ перехвата летательных аппаратов самонаводящейся электроракетой | 2018 |
|
RU2685597C1 |
| Оптико-электронная многоканальная головка самонаведения | 2020 |
|
RU2756170C1 |
| Электрический реактивный движитель | 2018 |
|
RU2689663C1 |
| Оптическая головка самонаведения | 2024 |
|
RU2836380C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2011 |
|
RU2476815C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
Изобретение относится к активным головкам самонаведения и может быть использовано в качестве бортового элемента летательных аппаратов как средство наведения на воздушные цели. Активная головка самонаведения содержит корпус 1, на внешней поверхности которого установлены флюгарки 4 с датчиками 8 их углового положения. Внутри корпуса 1 установлены блок 10 источников излучения 10.1 и оптическая система 2 линз с полосовым оптическим фильтром 3. Фильтр 3 установлен после оптической системы 2 линз перед фотоприемным устройством. Фотоприемное устройство выполнено в виде решетки 9 фотоприемников 9.1, установленных перед передней фокальной плоскостью оптической системы 2. Источники 10.1 выполнены расколлимированными, то есть имеют расширенную диаграмму направленности. Выходы фотоприёмников 9.1 соединены с платой 11 аналоговой обработки сигналов. Плата 11 содержит последовательно соединенные блок операционных усилителей 11.1 и блок пиковых детекторов 11.2. Выходы пиковых детекторов 11.2 соединены с платой 12 цифровой обработки сигналов. Плата 12 цифровой обработки сигналов содержит многоканальный аналогово-цифровой преобразователь 12.1, компаратор 12.2 и электронно-вычислительную машину (ЭВМ) 12.3. Вторые сигнальные входы ЭВМ 12.3 соединены с сенсорными датчиками 8 углового положения флюгарок 4, а управляющий выход ЭВМ 12.3 соединен через генератор 13 сильноточных импульсов с входами блока 10 источников излучения 10.1. Блок 10 импульсных источников содержит не менее одного импульсного источника 10.1 подсветки цели, а решетка 9 - не менее трех фотоприемников 9.1. ЭВМ 12.3 обработки сигналов выполнена на основе ARM (Advanced RISC Machine) архитектуры с математическим сопроцессором на общем кристалле. Сигнальный выход ЭВМ 12.3 соединен с выходной шиной головки самонаведения. Технический результат – повышение надежности работы головки самонаведения. 2 з.п. ф-лы, 8 ил.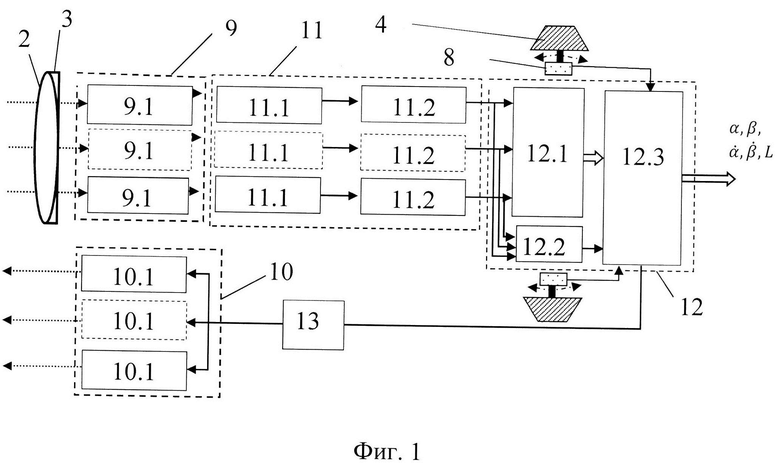
1. Активная головка самонаведения, содержащая корпус, внутри которого установлены входная оптическая система линз, блок источников излучения, а также фотоприемное устройство, соединенное через плату аналоговой обработки сигналов с платой цифровой обработки, соединенной по управляющему выходу с блоком источников излучения, а по сигнальному выходу - с выходной шиной головки самонаведения (ГСН), отличающаяся тем, что она дополнительно содержит флюгарки, а также полосовой оптический фильтр, установленный после оптической системы линз, перед передней фокальной плоскостью, в которой установлено фотоприемное устройство, выполненное в виде решетки фотоприемников, плата аналоговой обработки сигналов содержит последовательно соединенные блок операционных усилителей и блок пиковых детекторов, плата цифровой обработки сигналов содержит электронно-вычислительную машину (ЭВМ), а также многоканальный аналогово-цифровой преобразователь и компаратор, соединенные с первыми сигнальными входами ЭВМ, вторые сигнальные входы которой соединены с сенсорными датчиками углового положения флюгарок, а управляющий выход ЭВМ соединен через генератор сильноточных импульсов с входами блока источников излучения.
2. Активная головка самонаведения по п. 1, отличающаяся тем, что блок импульсных источников содержит не менее одного импульсного источника подсветки цели, а ее решетка - не менее трех фотоприемников.
3. Активная головка самонаведения по п. 1, отличающаяся тем, что ЭВМ обработки сигналов выполнена на основе ARM (Advanced RISC Machine) архитектуры с математическим сопроцессором на общем кристалле.
| Гладилка | 1950 |
|
SU91624A1 |
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2013 |
|
RU2573709C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА ПО ОТРАЖЕННОМУ ОТ ОБЪЕКТА ПОРАЖЕНИЯ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2005 |
|
RU2293942C2 |
| КОМПЛЕКСНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2483273C1 |
| Способ прогнозирования развития остеопоретических переломов поясничного отдела позвоночника | 2022 |
|
RU2816310C1 |

