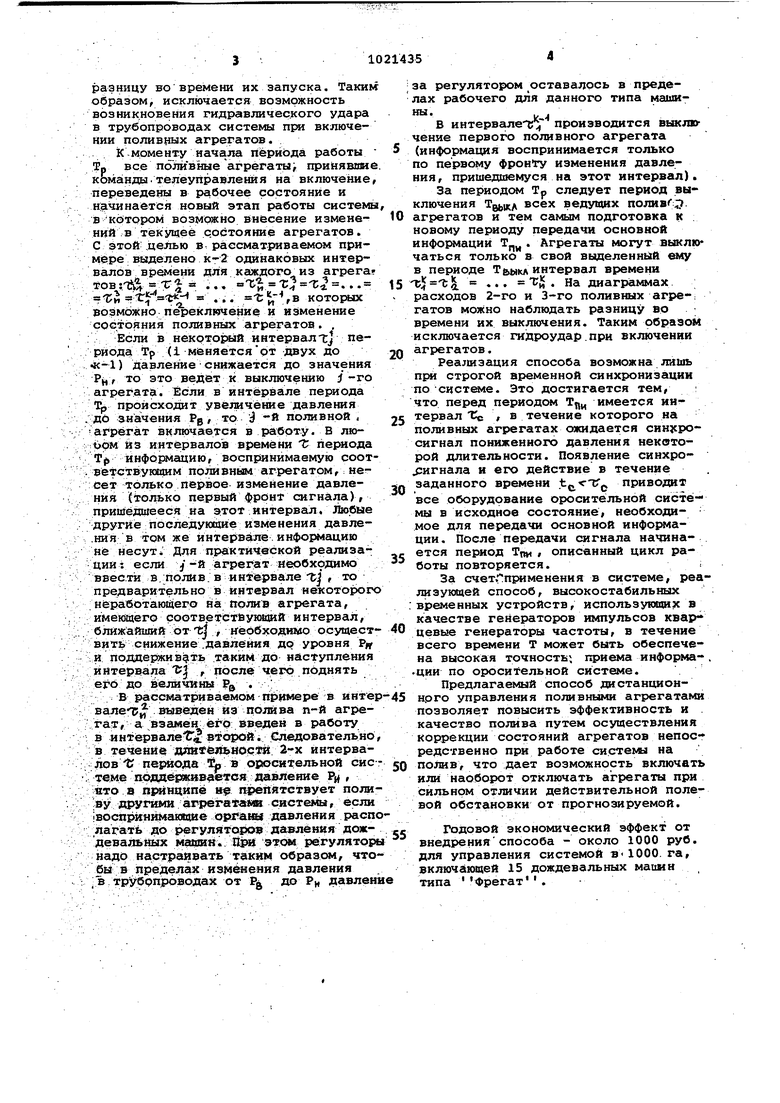
Изобретение относится к сельском хозяйству и может быть использовано при создании систем управления дождевальными установками.и машинами. Известен способ управления поливом/ согласно которому передачу ко манд осуществляют по радиоканалу, причем кроме типа команды формируют и передают адрес поливного агрегата а прием и отработку команды осущест вляет агрегат, адрес которого совпадает с переданным адресом. Для повышения помехозащищенности инфорл мацию передают несколько раз, принимают и передают обратно, ответ анализируют и только тогда посылают Команду исполнения 1. Однако данный способ характеризуется сложностью, так как использо вание радиоканала для осуществления способа требует применения сложного и дорогого оборудования, засоряет эфир и ставит задачу о защите самого радиоканала от помех. Наиболее близким к предлагаемому по технической сущности является спо соб дистанционного управления поливными агрегатами, включающий разделение цикла времени управления работой агрегатов на периоды времени передачи гидравлических сигналов управления включением агрегатов, времени работы агрегатов и времени отключения аг- . регатов, причем периоды времени пере дачи сигналов управ/1ения включением включения и отключения агрегатов разделяют /в фиксированные интервалы времени управления работой и интервалы времени включения и выключения каждого агрегата Г23Недостатком известного зпособа является низкое качество управления поливом из-за отсутствия синхрони.зации работы временных блоков и невозможнрсти управления агрегатами в период работы. Цель изобретения - повышение качества управления поливом путем синхронизации и управления агрегатами в период работы. Эта цель достигается тем, что согласно способу перед интервалом о времени передачи гидравлических сигналов управления передают синхронизируквдий сигнал понижения давления, а период работы разделяют на последовательные развные интервалы времени каждый из которых состоит из отрезков времени соответственно числу управляемых агрегатов, причем управление работой того или иного агрегата в период работы осуществляют по переднему фронту сигнала управления в соответствующем номеру агрегата отрезке времени, при этом отключение агрегата осуществляют по отрицательному/ а включение - по положительному фронту сигнала управления. На чертеже представлена .упрощенная временная диaгpa мa ;шавления в одной из точек трубопровода оросительной сети и диаграммы расходов нескольких поливных агрегатов системы. Работа системы в каждом поливе, повторяющемся с периодом Т Тп„+Т, вкл р- -Твыкл с « и -период передачи основной информации - гидравличес- . ких сигналов управления включением агрегатов; -период включения агрегатов, принявших команду управления В полив; -период полива и одновременной передачи дополнительной -информации о включении или выключении агрегатов; период выключения работавших на полив агрегатов; Тр - интервал для синхронизации . временных, устройств оросительной системы, начинается с передачи информации последовательно всем поливным агрегатам. Период передачи основной информации Тдц разделен на временные интервалы по числу поливных агрегатов в системе 1г° t.,. tr - (п - число .агрегатов). Командой.на включение некоторого j -го агрегата в полив в системе является наличие низкого давления уровня Рн в течение малого времени в интервале : периода Т , Если, например, в интервале создан сигнал пониженного давления Рц, то он распространяется по заполненным трубопроводам всей закрытой оросительной системы, но как команда телеуправления воспринимается только на первом поливном агрегате. Аналогично в интервалеt( J изменяется от 1 до п) информация воспринимается н j-м поливном агрегате. Если в течение интервала не был создан сигнал пониженного давления, то i-й поливной агрегат не получает команду на полив в рабочий период Тр, Таким.образом, в соответствии с диаграммой давления, представленной на чертеже, в период следует передача информации с заданием вес- . ти полив первому, третьему и п-му поливным агрегатам. С наступлением периода Т,, начинав еТся последовательное включение в олив поливных агрегатов, принявших команду телеуправления. Каждый агрегат может включиться только в свой ыделенный ему промежуток- времени j- (Г; tri -С ... -Си ) . На иаграммах расходов первого, третье-, 0 и п-го агрегатой можно наблюдать
разницу во времени их запуска. Таким образом, исключается возможность возникновения гидравлического удара в трубопроводах системы при включении ПОЛИВ1ШХ агрегатов.
К моменту начала периода работы 5 Тр все поЛивные агрегаты; принявшие, команды.телеуправлею я на включение, переведены в рабочее состояние и н чинается новый этап работы системы, в котором возмокно внесение измене- Ю НИИ в текущее с.остояние агрегатов. С этой .целью в ра1ссматриваемом приMiepe выделено к-2 одинаковых интервалов времени для каждого из агрега TOBJTJ, -Г J ... Т г -г. .. . 15 ... KOTOjaix возможно переключение и изменение состояния поливных агрегатов. ,
Если в некртоЕый интервал Trj периода Тр (1 меняетсярт двух до 20 «-) давление снижается до значения Р, то это ведет к выключению j -го агрегата. Если в интервале периода Тр происходит увёличёше давления
до значения g , то d и поливной , 25
агрегат включается в работу. В люtjpM ИЗ интервалов времени t периода Т информацию, воспринимаемую соотетствуквдим поливным агрегатом,: несет только первое изменение давления (голъко первый фронт сигнала), пришедаееся на Э:тот интервал, Любые другие последуюсше изменения давле.ния в том же интервале. инфо1 1ац.ию Hie несут/Для пра:ктйчвской реализации: если агрегат необходимо 35 ввести в.полив.в интервале tJ, то предварительно в интервал иекото1Х)го неработающего на прлие агрегата, имеющего cooтвel iгтfiyюйa й интервал, ближайший от tj , иеобходимо осуадест- 40 вить снижение .давлейия до уровня Pj и поддерживать таким до наступления интервала I /после чего поднять его до беличины Рд . ;
В pacc 4aтpивaeмoм п|)имере в йнтер-45 вале-Т выведен из полива п-й агрегат, а Взамен ёгрвввяен в работу
в интёрвалеЦГ второй. Следовательно, в течение ДШ ещ иое:Ш 2-х интервалов С периода Ij в оросительной сие- 5Q
теме пошерквв ется лхавление Р , «то а принципе Н(р препятствует полису другими агрегатами системы, если ВОспр нймаюЬ1иеО| га.ш« давления распо,лагать до регулято давления дож- ,девальных маиин. Йрй этхзм ретуляторы надо надстраивать образсм, чтобы в пределах из(4ёиения давления в трубопроводах от Pg до Рц давление
за регулятором оставалось в пределах рабочего для данного типа маши kВ интервале ; производится ВЫКЛСУ
чение первого поливного агрегата (информация воспринимается только по первому фронту изменения давления, пришедшемуся на этот интервал).
За периодом Тр следует период выключения Тц,жд всех ведущих noimaf:. агрегатов и тем самым подготовка к : новому периоду передачи основной информации Т . Агрегаты могут выклю чаться только в свой выделенный ему в периоде интервал времени . и На диаграммах расходов 2-го и 3-го поливных агре-: гатов можно наблюдать разницу во времени их выключения. Таким образом исключается гидроудар.при включении агрегатов.
Реа1шзация способа возможна ли111Ь при строгой временной синхронизгщии по систетле. Это достигается тем, : что перед периодом , имеется интервал TJ. , в течение которого на поливных агрегатах ожидается син сросигнал пониженного давления некоторой длительности. Появление синхро ;игнала я его действие в течение заданного времени t.-C приводит все оборудование оросительной систёмы в исходное состояние, необходимое для передачи основной информации. После передачи сигнала начинается период Тця , описанный цикл работы повторяется.
За счетГприменения в системе, реализующей способ, высокостабильных в ременных устройств, использующих в качестве генераторов импульсов кварцевые генераторы частоты, в течение всего времени Т может быть обеспечена высокая точность; приема информа«ции по оросительной системе.
Предлагаемый способ дистанционнрго управления поливными агрегатами позволяет повысить эффективность и качество полива путем осуществления коррекции состояний агрегатов непосредственно при работе си стегая на пошв, что дает возможность включать или наоборот отключать агрегат при сильнрм отличии действительной полевой обстановки от прогнозируемой.
Годовой экономический эффект от внедренияспособа - около 1000 руб. для управления системой в-1000. га, включающей 15 дождевальных маоин типа Фрегат .
m, с%г f
f ifii-tft-f fff f fff
«/ ( V /r f h
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления и контроля состояния поливных агрегатов автоматической оросительной системы и устройство для его осуществления | 1990 |
|
SU1702973A1 |
| Способ дистанционного управления и контроля работы поливных агрегатов | 1981 |
|
SU1083975A1 |
| Способ аварийной сигнализации поливных агрегатов и устройство для его осуществления | 1983 |
|
SU1189400A1 |
| Автоматизированная оросительная система | 1980 |
|
SU990148A2 |
| Автоматизированная оросительная система | 1980 |
|
SU940707A1 |
| Автоматическое устройство управления поливными агрегатами | 1982 |
|
SU1087122A1 |
| Способ дистанционного контроля поливных агрегатов оросительной системы и устройство для его осуществления | 1984 |
|
SU1248563A1 |
| Устройство управления группой дождевальных машин автоматизированной оросительной системы | 1980 |
|
SU884632A1 |
| Автоматизированная оросительная система | 1985 |
|
SU1429994A1 |
| Автоматизированная закрытая оросительная система | 1989 |
|
SU1637712A1 |
СПОаЭБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛИВНЬШИ АГРЕГАТАМИ, включакпшИ разделение цикла времени управления работой агрегатов на периоды времени передачи гидравлических сигналов управления включением агрегатов, времени включения в работу, времени работы агрегатов и времеюс отключения агрегатов, прячем времени передачи сигналов управления включением, включения и от ключения агрегатов разделяют на фиксированные интервалы времени управления работой и интервалы времени включения и отключения каждого агрегата, отличающийся тем, что, с целью повышения качества управления поливом путем синхронизации и управления агрегатами в период работы, перед интервалом времени передачи гидравлических сигналов управления передают синхсюнизирующий сигнал понижения давления, а период работы разделяют на последовательные равные интервалы времени, каждый из которых состоит из отрезков времени соответственно числу управляемых агрегатов, причем 5а1равление работой то(Л го или иного агрегата в период работы осуществляют по переднему фронту сигнала управления в соответствующем номеру агрегата отрезке времени. При этом отключение агрегата осуществля- ют по отрицательному, а включение по положительному фронту сигнала управления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Авторское свидетельство СССР по заявке 2942832/30-15, Кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
