(Л
с
2. У стройство для осущестЕления п 1, содвр кашев блок обработки I сигнелов, ко входам которого пошотючеиы выходы силоизмерительногсг датчика и пу«. тевых датчиков контрог1я осей, а к выходу блок регистрации, отличающееся тем, что в него введены гв нератор вьзсокой часточы демодулятор, согласующие грансформаторы и улравяя- емый(Ьильгр низкой частотыs причем БЫ«
ход генератора высокой частоты через первый согласующий трансформатор под.ключей к рельсам и ко второк согпасуromeivjy трансформатору, выход которого через демолулятор подключен к сигнаяь« нему входу управляемого фильтра низкой частоты, управляющий вход и ;аыход которого соединены соответственно с выхо Дом и входом блока обработки сиг нелов.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| ПОСТ КОМПЛЕКСНОГО КОНТРОЛЯ ДЕФЕКТОВ БУКСОВЫХ УЗЛОВ И КОЛЕС ДВИЖУЩИХСЯ ВАГОНОВ | 2014 |
|
RU2578005C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2167778C2 |
| РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ КОНТРОЛЯ ЗАНЯТОСТИ БЛОК-УЧАСТКА И КАБЕЛЬНЫЙ ПЕТЛЕВОЙ ДАТЧИК КОНТРОЛЯ ПРОХОДА КОЛЕСНЫХ ПАР И ЕДИНИЦ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2340497C2 |
| НАЗЕМНЫЙ ДИАГНОСТИЧЕСКИЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС | 1997 |
|
RU2120876C1 |
| Устройство для разбраковки колес рельсового подвижного состава | 1972 |
|
SU734046A1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Ж/Д | 2017 |
|
RU2676176C1 |
| Устройство для автоматического выявления неровностей на поверхности катания колесных пар | 1977 |
|
SU709440A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПЕРЕХОДНОГО СОПРОТИВЛЕНИЯ МЕЖДУ КАЖДОЙ КОЛЕСНОЙ ПАРОЙ И РЕЛЬСАМИ | 2020 |
|
RU2744490C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
1. Способ ПООСНОГО взвешивания , железнодорожных вагонов в движении путем преобразования свлы в электрический сигнал, отличающийся тем, что, с целью повышения точности, запитывают рельсы весоизмерительного участ-; ка током высокой частоты и при шунтировании колесной парой этого участка измеряют сопротивление контакта колесо -p6Льc,.. пoвeличин6кoтopoгDcyдят овесевагона.
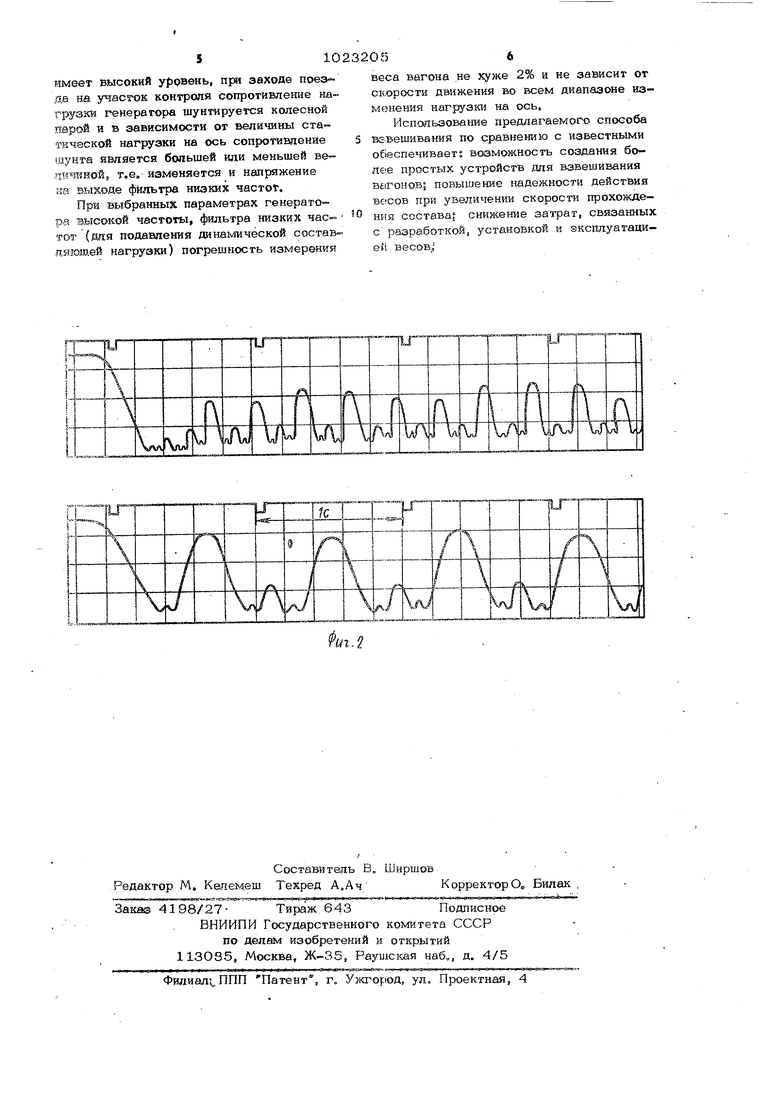
Изобретение относится к В8соизмери тельной тезтйке Известны СП особы поосного взвешивани вагонов железнодорожного транспорта в движении, основанные на измерении силового воздействия на грузоприемные платформы со стороны вагонов во время их перемещения по железнодорожным путям, уяогквннь м на эти шштфор1мьи Для устракекия влияния Д 1наг.№ческой помехи сигнал весоиамеригельных датчиков подвергают спешзальиой обработке, например применяют низкочастотны фияьт ры, простое и двухкратное интегрирование скользящее усреднение тзди интегрирование с весовой функцией, что повышает точ ность измерения | 1J, Однако все эти способы требуют ссору жения громоздких и дорогостоящих грузо- приемных платформ, Наибояее близким по технической сущ«ностй к изобретению является способ по™ осного взвешивания железнодорожньгх вагонов в движении преобразования силы в электрический сигнаПс Согласно . указанному способу весовое устройство располагают когаеи таким образом что гребень колеса наезжает на опорную поверхность, приподнимается и отрывает- ся от рельсового пути, масса колесной пары и приходящаяся на нее нагрузка измеряется при этом весами 2,J, Извесгно также устройство для поос™ кого взвешивания жеяеанодорюжнык вагонов в движении, содержащее блок обработ ки сигналов ко входам которого иодйпо ены выходы силоизмери тельного датчи1са и пу евых датчиков кон-гропя осей, а к выходу блок регистрации | 2 НедсЬтаток данного способа , эакпюча- ется в сложнос-ти его реаяизации, а недо«сгаток указанного устройства. состоит в тоМ( что точность намерения зависит от скорости движения вагонов. Цель изобретения - повышение точности. Поставленная цель Достигается тем, что запитывают рельсы весоиамеритедьного участка током высокой частоты и при шунтировании колесной парой этого участка измеряют сопротивление контакта колесо-рельС; по величине которого судят Q весе. Предгшженный способ основан на том, чгчэ согласно теории упругости при взаи./{одействии колеса с рельсом площадь контакта зависит от статической нагрузки на ось и определяется аыраг-кением 5 0,00255-1/ , где 5 площадь контакта колесо- рельс р - статическая нагрузка на ось, Поскаяьку площади поперечного сечекия рельса и оси колесной пары значи1ельно больше площади контакта копесо рел.ьс, то именно величина электрическо PS сопротивления второго контакта хараю тэризует величину статической нагрузки на ось. Кроме ТОГО;, в устройстве для ocyuieciv Кхения предлагаемого способа введены генератор высокой частоты, демог лятор, согласующие трансформаторы и управпяелоый фильтр низкой частоты, причем выход генератора высокой частогь через парный согласующий трансформатор под™ кпючен 14 рельсам и ко второму согласующему трансформатору, выкод которого через дeмoд d ятop пошслючен к сигнальHOJvjy входу управляемого фильтра низкой частоты5 управляющий вход и выход которого соединены соответственно с выходом и входом блока обработки сигналов. На (|иг. 1 представлена блок-схема устройства для осуществления предлагаемого способа; на иг, 2 диаграм мы, полученные при опытной проверке работы устройства. Устройство содержит путевые датчики 1, 2 и 3, высокочастотный генератор 4, подключенный через согласукиаие трансформаторы 5 и 6 к демодулятору 7 и . рельсам 8 и 9, причем демодулятор 7 соединен с фильтром 10 низких частот Схема 11 определения скорости, ячейки 12 памяти, схема 13 отметки вагона триггер 14, распределители 15 и 16, ге нератор 17, рас1:5)еделитеяъ 18, счетчик 19 вагонов, сумматор 20, преобразователь 21 напряжение - частота, коммутаторы 22 и 26, регистр 28 памяти, коммутатор 24, суммирующий счегчик 25 и коммутатор 26 образуют Опок 27 обработки сигналов Второй вход и выход фильтра Ю низких частот подключены к блоку 27 обработки сигналов, выходы которого соединеныс блоком 28 регистра.ции. Устройство работает следующим образом. При прохождении вагонов по рельсам 8 и 9 на участке контроля импульсами с датчиков 1, 2 и 3 управляются схема 11 определения скорости, триггер 14 и распределитель 15 блока 27 обработки сигналов. Во время прохождения колесной пары между датчиками 1 и 2 в схеме 11 определения скорости Гфоисходит преобра зование временного интервала между сиг налами с датчиков 1 и 2 в напряжение. и запоминание его до прохождения колес .ной парой Датчика 3„ С выхода схемы 11 напряжение, пропорциональное скорости движения состава, подается на перестраиваёмый фильтр 10 низких частот,. частота среза которого увеличивается пр увеличении скорости движения и уменьша ется при уменьшении скорости. При нахождении колесной пары на участке между датчиками 2 н 3 происходит шунтирование выхода трансформатора 5 колесной парой, величина напряжения высокой часготы, подаваемого на трансформатор 6, определяется величиной сопротивления шунта, которое зависит от шюшади контакта колесо - рельс, т.е. практически от сопротивления контакта колесо - рёль Огибающая высокочастотного напряжения с выхода демодулятора 7 поступает на .тр 10 низких частот, с выхода кото рого низкочастотная составляюшая сигнала, отфильтрованная от динамической .помехи, подается, на ячейки 12 памяти и схему 13 отметки вагона, представляющую собой к(4паратор с двумя пороговыми значениями, при превышении одного из пороговых уровней вырабатывается сигнал отметки вагона, второго - нахождения поезда на участке контроля. Импульс отметки-вагона с выхода схемы 13 поступает на сдан из входов триггера 14, на второй вход которого подается импупьс с датчика 3, и на выходе триггера 14 появляется импульс, задний фонт которого соответствует прохождению вагона над датчиком 3. Импульсами с распределителя 15 осуществляется управление ячейками 12 памяти таким образом, что сигнал с фильтра Ю низких частот при прохождении колесных пар по участку контрспя записывается в свободную ячейку памяти, с выхода схемы 12 - через сумматор 2О, где про . исходит сложение поступающих на вход напряжений, результирующее напряжение подается на преобразователь 21 напряжение - частота. После прохождения вагоном датчика 3 задним фрсятом импульса с триггера 14 происходит освобохчДение ячеек памяти схемы 12, запуск распределителя 16 и счетчика 19 вагонов. С выхода преобразователя 21 число импульсов,, соответствующее весу вагона, поступает на суммирующий счетчик 25 и через коммутатор 22, на Второй вход которого поступают импульсы с распределителя 16, . подается на регистр 23 памяти, где производится их C4JT и запоминание. После прохождения состава по участку контроля импульсом с выхода схемы 13 отметки вагона запускается генератор 17, выход которого подключен к распределителю 18. С выхода регистра 23 памяти через коммутатор 24,. управляемый рас преДелителем 18, информация о весе вагонов поступает на блок 28 регистрации, через коммутатор 26, управляемый сиг HfflioM прохода поезда с блока 13 отметки вагонов, на блок регистрации проходит информация о числе и общем весе вагонов. При испытании аппаратуры контроля дефектов колес, были проведены записи напряжения на выходе фильтра низких частот (частота генератора высокой частоты составила 4ОО кГц) ни самописец типа Н-327 (см. фиг. 2). При отсутствии поезДа на измерительном участке напряжение на выходе демодулятора и фильтра10имеет высокий уровень, при заходе поезда на участок контроля сопротивление нагрузки генератора шунтируется колесной парой и в зависимости от величины статической нагрузки на ось сопротиЕйение шунта является большей или меньшей ве , т.е. изменяется и напряжение на выходе фильтра низких частот, При выбранных параметрах генератора высокой частоты, фильтра низких частог (ш5я подавления динамической составляюш.ей нагрузки) погрешность измерения 056 веса вагона не хуже 2% и не зависит от ск.орости движения во всем диапазоне изменения нагрузки на ось, Использование предлагаемого способа взвешивания по сравнению с известными ofiecneMHBaeT возможность создания болею простых устройств для взвешивания В 1гонов| повышение надежности действия при увеличении скорости прохожде- НИИ состава снижение затрат, связанных с разработкой, установкой и зксплуатацией весов,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Взвешивание движущихся объек:тов | |||
| Обзорная информация ЦНИИТЭИ приборостроения | |||
| М,, 1974, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кулисный парораспределительный механизм | 1920 |
|
SU177A1 |
| Способ утилизации отработанного щелока из бучильных котлов отбельных фабрик | 1923 |
|
SU197A1 |
