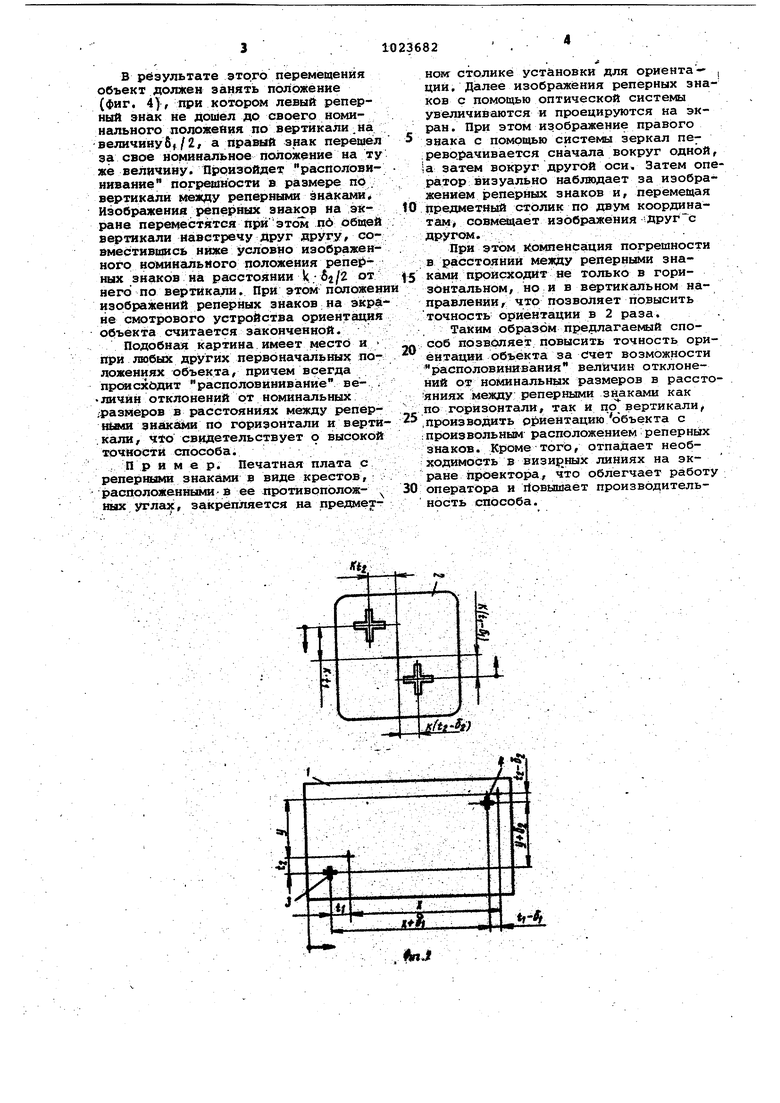
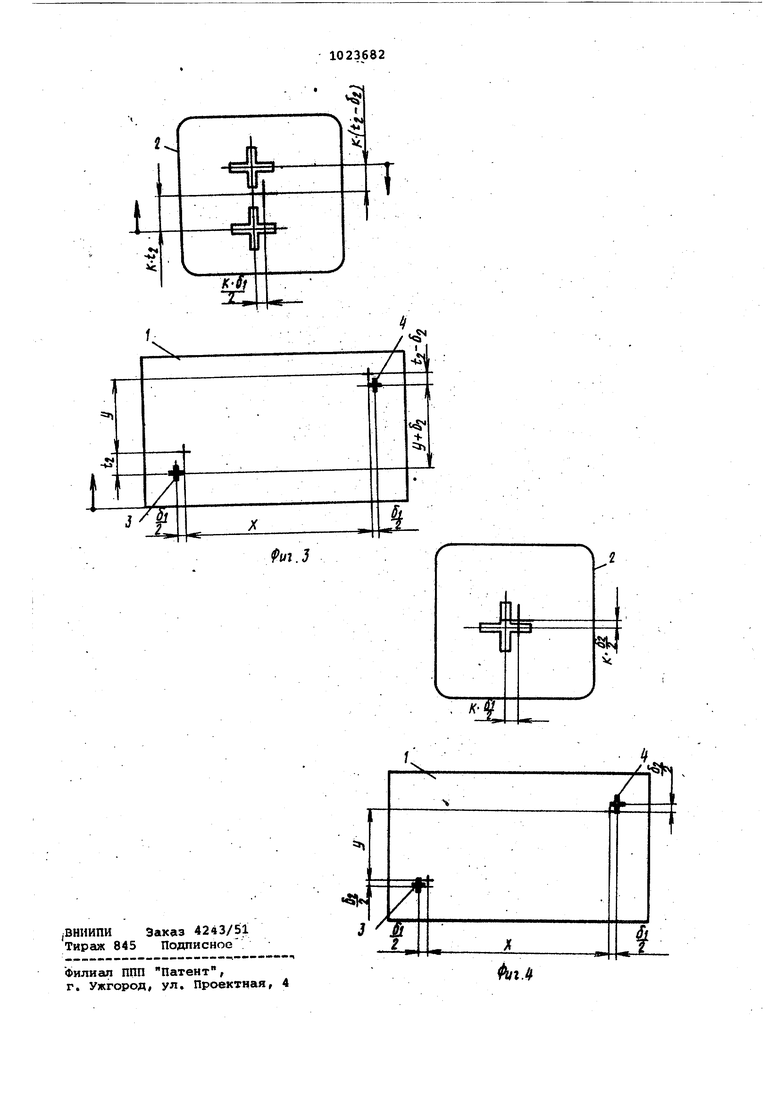
Изобретение относится к технологии изхотовления многослойных Печатных плат и Может быть использовано при ориентации слоев путек совмещения их репёрных знаков на смотррвом устройстве для последующего выполиени; операций обработки и контроля слоев печатной платы. Известен способ ориентации объекта/ котЬралй заключается в том что совмещаются изображения, распо ойсённые на одной прямой линии в разных плоскостях, помещенных друг под гом l . Однако данный способ не позволяет совмещать изображения, расположенные в плоскости, не обеспечивает Достаточной точности и еложен в реализации Наиболее близким техническим решением к изобретений) является способ ориентации объекта-, включающий одновременное проецирование на экра изображений двух репёрных знаков объекта, слежение за изображениями репёрных знаков и перемещение объек та, причем изображение одного из ре первых знаков проецируется на экран зеркально отраженным по отношению к изображению другого реперного знака . , - : . ; , Однаи о известный способ имеет недостаточную точность ориентации, так как компенсация погрешности в расстоянии между реперными знаками возможна только в горизонтальном направлении. Кроме того, этот спосо не позволяет производить точную ори ентацию объекта с вертикальным или диагональным расположением репёрных знаков. .. Целью изобретения является повышение точности ориентации и расширение технологических возможностей способа.. Поставленная цель достигается те чТо согласно способу ориентации объ :екта, преимущественно печатной платы, включающему одновременное проецирование на экран изображений.дву : реПерных знаков объекта, слеженяе з : изображениями репёрных знакоа и перёмоаение объекта; при пр6ецЙ1рЬвани на экран изобргйсёния репёрных знаков разворачивают одно относительно другого на 180 в плоскости изЬбра, жений. . , . , ,. . . ..:. : , На фиг.1 изображена ПЕданЦипиаль ная схема осуществления способ ори ентации, йа фиг, 2 - первый этап ориентации , на фиг/; 3 - второй этап ориентации; на фи1 4 -трёти:й этап ориентацииi..:-.- , ./.-;. ,.., ;: ;. ,./ -,:;. Способ ориентации Ьбъе|ста осущесТвляётея следукяцим oGpasoM,. Производится перем ение объекта 1ФИГ. 1) с ;одновременным проецированием на экран 2 изображений репер ных знаков 3 и 4 объекта, причем изображение правого реперного знака 4 повернуто в плоскости изображений на 180 по отношению к изображению левого реперного знака 3. Следствием этого является то, что перемещение объекта, например вправо и Вверх для приведения репёрных знаков 3 И 4 в номинальное положение вызывает аналогичное перемещение на экране 2 изображения левого реперного зНака и Противоположное (влево и вниз) перемацение правого реперного знака. Эти перемещения показаны стрелками. В случае, когда реперш е з наки объекта приводятся в номинальное положение, их изображения на экране оказываются совмещенными в- точке, соответствующей этому положению. EfcuiH же номинальными расстояниями мёзкду реперными знаками являются .х По горизонтали и у по вертикали (фиг. 2), а фактически они выдержаны с отклонениями, например, в сторону увеличения и оказываются рав НымИ V + б v| по гори 3 онтали и Л Jt -2. ° вертикали, то совмещения знаков, с их номинальным положением произойти не может, так как перед началом ориентации левый знак 3 находится от ;своего номинального положения на расстоянии tyj По горизонтали и t по вертикали, а правый знак соответственно на расстоянии - S и ±2 зкране 2 эти расстояния указаны с учетом коэффициента увеличения k. Направление, в котором необходимо перемещать объект, начиная его ориентацию по горизонтали, и соответствующие ; напЕ авления перемещения изображений репёрных знаков на экране показаны стрелками. Идеальным будет случай, когда левый рёПерный знак не дойдет в процессе ориентации по горизонтали до своего номинального положения на Величину , а правый еперный знак перейдет на ту же величину за свое )минальное положение (фиг. 3}, т.еу произойдет располОвиниванне погрешности в размере по горизрн- / тали между репершлми зйакамй. При этом изображений репёрных знаков на экране 2 смотрового устройства окажутся на общей вертикали, расположенной слева на расстоянии k- $4/2 от условно изоб)ажаемого номинальЛюго Положения репёрных знаков, где {(г коэффициент увеличения. . .: :,--,.. ..:;.,. . . „ . Г-после этого ортаетсясориентировать объект в вертикальном .направлении . Йа фиг, -3 стрелками показано ИЕШрайленИе необходимого Яля этого перемвцения Объекта и 11а:правлёния соответстВукйцих перемещений изобра- жёний репёрных знаков на экране смотрового устройства. В результате этого перемещения объект должен занять положение (фиг. 4), при котором левый реперный знак не дошёл до своего номинального положения по вертикали на величину5,/2/ а правый знак перещел за свое номинальное положение на ту же величину. Произойдет располовинизание погрешности в размере пс вертикали реперными знаками Изображение реперных знакор на экране переместятся при этом п6 общей вертикали навстречу друг другу, совместившись ниже условно изображен ного номинального положения репе)ных знаков на расстоянии k - 6г/2 от него по вертикали. При этом положен изображений реперных знаков на экр$ не смотрового устройства ориентация объекта считается законченной. Подобная картина имеет место и при любых других первоначальных положениях объекта, причем всегда происходит располовИнивание ве- . личин отклонений от номинальных ;размеров в расстояниях между репёр« «и зиака ми по горизонтали и верти.кали, свидетельствует о высокой точиости способа. П р и м ер. Печатная плата с репернымИ знаками в виде крестов, расположенИыми и ее лротивоположных углс1х, закрепляется на предмеуноиг столике установки для ориента- циИ. Далее изображения реперных знаков с помощью оптической системы увеличиваются и проецируются на экран. При этом изображение правого знака с помощью системы зеркал переворачивается сначала вокруг одной, ia затем вокруг другой оси. Затем оператор визуально наблюдает за изображением реперных знаков и, перемещая предметный столик по двум координаTaMj совмещает изображения другом. При этом Компенсация погрешности в расстоянии между реперными знаками происходит не только в горизонтальном, но и в вертикальном направлении, что звоЛяет повысить точность ориентации в 2 раза. Таким образом предлагаемый способ поэвйляет повысить точность ориентации объекта за счет возможности располовинивания величин отклонеий от номинальных размеров в расстониях между реперными знаками как о горизонтали, так и пр вертикали производить ориентациюобъекта с роизвольным расположением реперных знаков. Кроме того, отпадает неободимость в визирных линиях на экане прьектора, что облегчает работу ператора и Новышает производительость способа.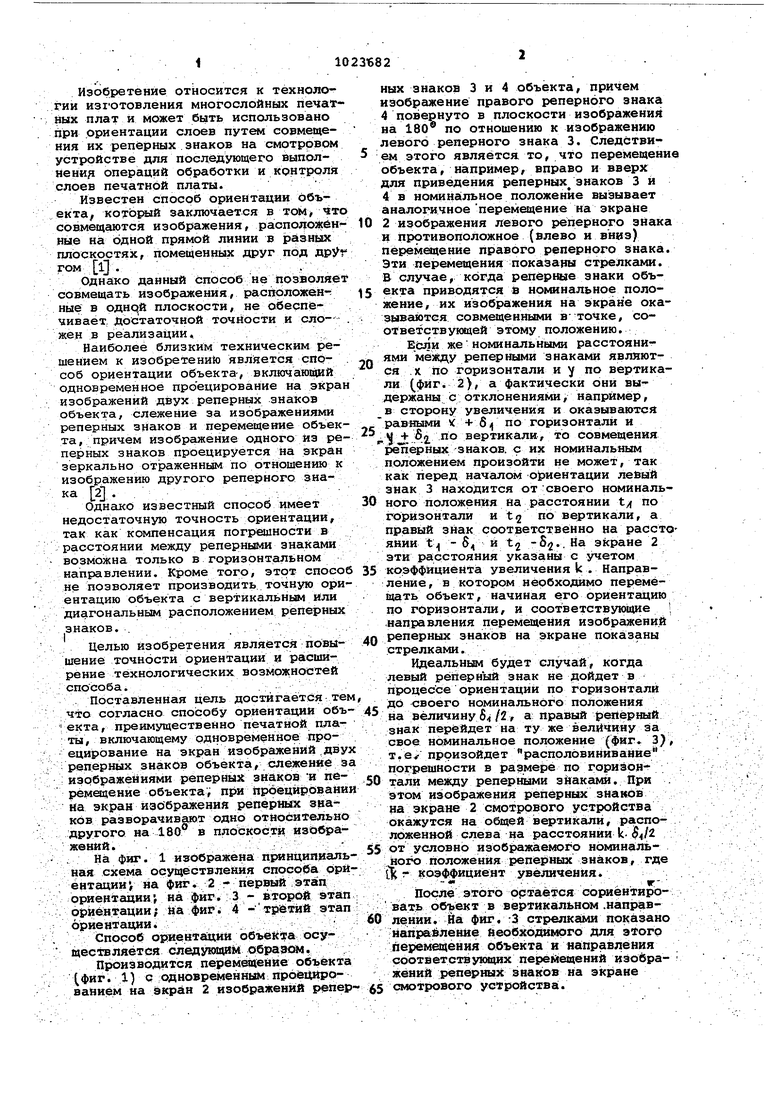
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации объекта | 1977 |
|
SU834806A1 |
| ЦИФРОВАЯ СТЕРЕОФОТОКАМЕРА/ЦИФРОВАЯ СТЕРЕОВИДЕОКАМЕРА, ТРЕХМЕРНЫЙ ДИСПЛЕЙ, ТРЕХМЕРНЫЙ ПРОЕКТОР И ПРИНТЕР И СТЕРЕОВИЗУАЛИЗАТОР | 2005 |
|
RU2345394C2 |
| Устройство для пробивки базовых отверстий | 1982 |
|
SU1066052A1 |
| Способ контроля совмещаемости фотошаблона | 1979 |
|
SU819856A1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ РЕГУЛИРОВКИ УРОВНЯ (ВАРИАНТЫ) И СПОСОБ ОТОБРАЖЕНИЯ РЕГУЛИРОВКИ УРОВНЯ | 1999 |
|
RU2181230C2 |
| СПОСОБ КОНТРОЛЯ СВЕТОВЫХ ПОТОКОВ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2300090C1 |
| Устройство для устранения панорамных искажений при трансформировании аэрофотоснимков | 1980 |
|
SU887931A1 |
| СИСТЕМА ВИДЕОДИСПЛЕЯ | 1988 |
|
RU2113066C1 |
| Способ получения томограмм | 1983 |
|
SU1124927A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ (ВАРИАНТЫ) | 2003 |
|
RU2264299C2 |
СПОСОБ ОРИЕНТАЦИИ ОБЪЕКТА, ;преимущественно печатной платы. включающий одновременное проецирование на экран изображений двух реперных знаков объекта, слежение за изображениями реперных знаков и перемацение объекта, отличающийся тем, что, с целью повышения точности ориентации и расширения технологических возможностей способа, при проецировании на экран изображения реперных знакбв разворачивают одно относительно другого на 180 в плоскости изображений . (Л С ю со А СХ) го
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАСХОДОМ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 1990 |
|
RU2079163C1 |
| Способ ориентации объекта | 1977 |
|
SU834806A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
