датчик расхода массы, четвертый и пятый сумматоры, шестой блок умножения, фильтр нижних частот, интегратор и датчик расхода топлива, причем первый и второй входы четвертого сумматора подключены, соответственно к выходам арксинусного функционального преобразователя и пятого блока умножения, выход четвертого сумматора подключен к первому входу шестого блока умножения, второй вход которого подключен к выходу второго масштабирующего усилителя, а выход
29630
шестого блока умножения через фильтр нижних частот соединен с входом интегратора, выход которого подключен к первому входу пятого сумматора, второй, третий, четвертый входы и выход которого подключены соответственно к выходу датчика начальной массы, выходу датчика расхода массы, выходу датчика расхода топлива и к второму входу второго блока умножения, выходом вычислителя угла атаки является выход пятого блока умножения,
| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислитель угла атаки | 1982 |
|
SU1072069A1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА ТОПЛИВА САМОЛЕТА | 2008 |
|
RU2377507C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ САМОЛЕТА | 1988 |
|
RU2041136C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| Устройство определения и индикации углов крена самолета | 1991 |
|
SU1827361A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
ВЫЧИСЛИТЕЛЬ УГЛА АТАКИ, содержащий три сумматора, пять блоков умножения, дифференцирующий элемент, три делителя, косинусный, обратногиперболический, арксинусный, диодный кусочно-квадратичный и диодный кусочно-линейный функциональные преобразователи, два масштабирующих усилителя, первый и второй входы первого делителя подключены соответственно к выходам датчиков скорости полета и скорости изменения высоты полета, а его выход через первый масштабирующий усилитель подключен к первому входу первого сумматора, второй вход которого через дифференцирующий элемент подключен к выходу датчика скорости полета, третий вход первого сумматора подключен к выходу первого блока умножения, первый и второй входы которого подключены соответственно к выходу датчика осевого ускорения и к выходу косинусного функционального преобразователя, первый и второй входы второго делителя подключены соответственно к выходу первого с гмматора и к выходу датчика вертикального . ускорения, выход через арксинусный функциональный преобразователь подключен к входу косинусного функционального преобразователя, первый вход второго блока умрюжения подключен к выходу датчика вертикального ускорения, а его выход подключен к первому входу второго сумматора, второй вход которого подключен к выходу датчика тяги силовой установки, выход, второго сумматора соединен с первым входом третьего делите§ ля , второй вход которого через второй масштабирующий усилитель (Л подключен к- выходу датчика скоростного напора, выход третьего делителя подключен к первому входу третьего сумматора, второй и третий входы которого подключены соответственно к выходам третьего и четвертого блоков умножения, первые входы которых подключены соответственно к выходам датчиков отклонения руля высоты и угловой скорости тангажа, вторые входы которых подключены соответственно через диодный кусочноквадратичный и диодный кусочно-линейный функциональные преобразователи к выходу датчика числа Маха, выход третьего сумматора подключен к первому входу пятого блока умножения, второй вход которого через обратногиперболический функциональный преобразователь подключен к выходу датчика числа Маха, отличающийся тем, что, с целью повышения точности определения истинного угла атаки, он дополнительно содержит датчик массы.
Изобретение относится к автоматическому управлению и может быть использовано в системе автоматического управления движущимся объектом например самолетом. . Известны вычислители углов атаки отличительной особенностью которых является использование сумматоров, множителей, делителей и функциональных преобразователей ij и . Однако точность вычисления углов атаки с помощью этих устройств в значительной мере зависит от точност измерения расхода горючего бортовыми средстэами, а погрешность бортовых топливомеров достигает 10%. Наиболее близким по технической сущности к предлагаемому является вычислитель угла атаки, который содержит три сумматора, пять блоков умножения, дифференцирующий элемент , три делителя, пять функциональных преобразователей, два масштабирующи усилителя, первый и второй входы пе вого делителя подключены соответственно к шинам скорости полета и скорости изменения высоты полета,а его .выход- через первый масштабирующий усилитель подключен к первому входу первого сумматора, второй вход которого через дифференцирующга элемент подключен к шине скорости полета, третий вход первого суммато ра подключен к выходу первого блока умножения, первый и второй входы которого подключены соответственно к шине осевого ускорения и к выходу косинусного функционального преобра зователя, первый и второй входы второго делителя подключены соответственно к выходу первого сумматора и к шине вертикального ускорения, а его выход через арксинусный функциональный преобразователь подключен к входу косинусного функционального преобразователя, первый вход второго блока умножения подключен к шине вертикального ускорения, а его выход подключен к первому входу второго сумматора, второй вход которого подключен к шине тяги силовой установки, выход второго сумматора соединен с первым входом третьего делителя, второй вход которого через второй масштабирующий усилитель подключен к шине скоростного напора, выход третьего делителя подключен к первому входу третьего сумматора, второй и третий входы которого подключены соответственно к выходам третьего и четвертого блоков умножения, первые входы которых подключены соответственно к шинам отклонения руля высоты и угловой скорости тангажа, вторые входы которых подключены соответственно через функциональные преобразователи к шине числа Маха, выход третьего сумматора подключен к первому входу пятого блока умножения, второй вход которого через обратно-гиперболический функциональный преобразователь подключен к шине числа Маха 3J . Его особенностью является предварительное вычисление текущей массы
3I
самолета с использованием зависимости вида
cJ-ot cJ.S
1Т
iV(t
где Сц и Су - производные коэффициента подъемной силы по углу атаки и отклонению руля высоты Яц - вертикальное ускореИ б ние самолета;
угол отклонения руля высоты;
угол атаки, измеренный инерциальным спо.собом;
- скоростной напор потока;
5 - мидель самолета. Инерциальный : угол атаки о имеет погрешность, вызванную возмущениями движения самолета турбулентностью воздушного потока. Поэтому сигнал массы, измеренный таким способом, пропускается через фильтр низких частот. Затем по вычисленном значению массы проводится вычислени истинного угла атаки (X, известным способом:
f «у g л
С ( 5 Ч I
Недостатком такой схемы вычисления, является зависимость точности вычисления массы, а следовательно, иугла атаки, от точности определения Су и
Ч
Цель изобретения - повышение точности измерения истинного угла атаки.
Указанная цель достигается тем, что в вычислитель, угла атаки, состоящий из трех сумматоров, пяти блоков умножения, одного дифференцирующего элемента, трех делителей, косинусного обратно-гиперболического, арксинусного, диодного кусоЗДоквадратичного и диодного кусочнолинейного функциональных преобразователей и двух масштабирующих усилителей, первый и второй входы первого делителя подключены соответственно к выходам датчиков скорости полета и скорости изменения высоты полета, а его выход через первый масштабирующий усилитель подключен
29630
к первому входу первого сумматора, второй вход которого через дифференцирующий элемент подключен к выходу датчика скорости полета, третий
5 вход первого сумматора подключен к выходу первого блока умножения, первый и второй входы которого подключены соответственно к выходу датчика осевого ускорения и к выходу
JO косинусного функционального преобразователя, первый и второй входы второго делителя подключ-ены соответственно к выходу первого сумматора и к выходу датчика вертикального
(1 скорения,а его выход через арксинусный функциональный преобразователь подключен к входу косинусного функционального преобразователя, первый вход второго блока умножения
jj подключен к выходу датчика вертикального ускорения, а его выход подключен к первому входу второго сумматора, второй вход которого подключен к выходу датчика тяги силовой
25 установки, выход второго сумматора подключен к первому входу третьего делителя, второй вход которого через второй масштабирующий усилитель подключен к выходу датчика скоростно го напора выход третьего делителя подключен к первому входу третьего сумматора, второй и третий входы которого подключены соответственно к выходам третьего и четвертого блоков умножения, первые входы которых подключены соответственно к выходам датчиков отклонения руля высоты и. угловой скорости тангажа, вторые входы которых подключены соответственно через диодный кусочноквадратичный и диодный кусочнолинейный функциональные преобразователи к выходу датчика числа Маха, выход третьего сумматора подключен к первому входу пятого блока умножения,
второй вход которого через обратногиперболический функциональный преобразователь подключен к выходу датчика числа Маха, введены датчик массы, датчик расхода массы, четвер50 тый и пятый сумматоры, шестой блок умножения, фильтр н.ижних частот и интегратор, датчик расхода топлива, причем первый и второй входы четвертого сумматора подключены соответ55 ственно к выходам арксинусного функционального преобразователя и пятого блока умножения, выход четвертого сумматора подключен к
первому входу шестого блока умножения, второй вход которого подключен к выходу второго масштабирующего усилителя, а выход шестого блока умножения через фильтр нижних частот соединен с входом интегратора, выход которого подключен к первому входу пятого сумматора, второй третий, четвертый входы и выход которого подключены соответственно к выходам датчиков массы, расхода массы, расхода топлива и к второму входу второго блока умножения, выходом вычислителя угла атаки является выход пятого блока умножения.
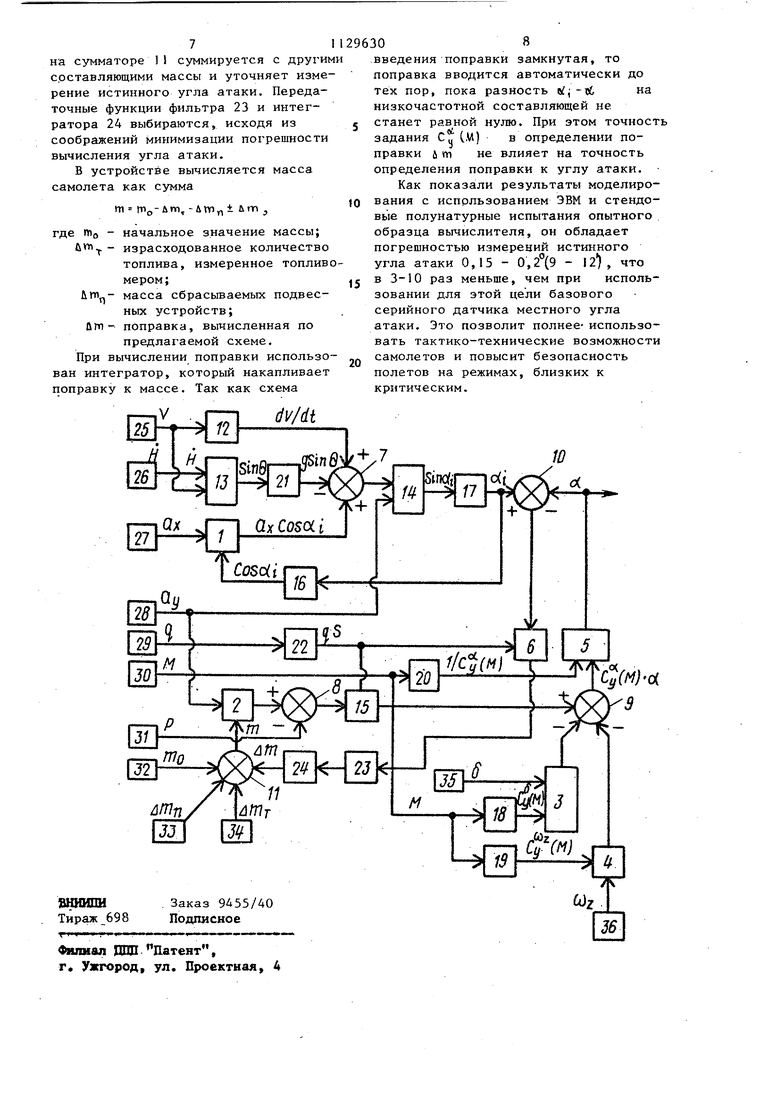
На чертеже представлена структурная схема вычислителя угла атаки.
Устройство состоит из первого шестого блоков умножения I - 6 первого - пятого сумматоров 7-11 дифференцирующего элемента 12, первого - третьего делителей 13 15, косинусного 16, арксинусного
17,диодного кусочно-квадратичного
18,диодного кусочно-линейного 19, обратно-гиперболического 20 функциональных преобразователей - первого
и второго масштабирующих усилителей 21 и 22, фильтра нижних частот 23 и интегратора 24.
Входами вычислителя угла атаки являются датчики 25 скорости, 26 скорости изменения высоты, 27 осевого и 28 вертикального ускорений, 29 скоростного напора, 30 числа Маха тяги, 31 силовой установки, 32 массы, 33 расхода массы, 34 расхода топлива, 35 отклонения руля высоты, 36 угловой скорости .тангажа .
Вычислитель работает следующим образом.
Истинное значение угла атаки определяется из проекции полной силы, приложенной к самолету, на вертикальную ось самолета. Для этого предварительно известное значение массы самолета, получаемое на выходе сумматора 11, умножается s блоке умножения 2 на вертикальное ускорение О . Из вычисленной таким образом полной силы после вычитания в сумматоре 8 проекции тяги двигателя Р и деления на произведение (jS в делителе I5 получается полное значение коэффициента Си. На сумматоре 9 выделяется составляющая коэффициента Си,зависящая от угла
0 и числа М , Коэффициент Сц можно разложить следующим образом:
СО,,
«et
C,jC(M)-ci4CylM).).Wj.,
где Сц - коэффициент подъемной силы; 0 - угол атаки;
о - угол отклонения руля высоты; угловая скорость тангажа; С(М ..)
и ) производные коэффициенты
подъемной силы соответственно по углу атаки od , отклонению руля высоты о и угловой скорости тангажа Qg зависящие от числа М .
В сумматоре 9 из коэффициента полной подъемнойсилы выделяется его часть, зависящая от угла атаки oi
cJ(M)-ot--Cy-C SMV8-c nw)-w.
функциональный преобразователь20 воспроизводит зависимость /Си{М). устанавливаемую экспериментально в результате продувок в аэродинамической трубе и летных испытаний для каждого типа самолета. Таким образом, на выходе блока умножения получается значение истинного угла атаки.
Одновременно угол атаки вычисляется инерциальным способом. Вычислитель инерционального угла атаки решает уравнение вида
Я „ (3V с(ц ,„с,.--.,.-.собвС,
где S V /И ;
0 - угол наклона траектории; - скорость изменения высоты полета(вертикальная скорость); V - скорость полета.
Известно, что такой способ определения угла атаки имеет погрешность, вызванную невозможностью учета турбулентности атмосферы. Частота этой погрешности существенно вьше частоты погрешности измерителя израсхЬдованного топлива.
Разность ь1 Об , выделенная в сумматоре 10, в результате последовательного прохождения через блоки 6, 23 и 24 приводится к масштабу поправки к предварительно известному значению массы самолета, после фильтрации и интегрирования эта поправка
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 2856127, кл | |||
| Упругая металлическая шина для велосипедных колес | 1921 |
|
SU235A1 |
| Реактивная дисковая турбина | 1925 |
|
SU1958A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ СИНХРОННОГОДВИГАТЕЛЯ | 0 |
|
SU235150A1 |
| Судно | 1925 |
|
SU1961A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ СИНХРОННОГОДВИГАТЕЛЯ | 0 |
|
SU235150A1 |
