4. Устройство ПО.П.1, о т л и ч а ю щ е е с .я тем, что, с целью упрощения конструкции устройства, задатчик натяжения вьпполнен в виде регулируемой пружины, один конец
которой жестко соединен с корпусом мотального автомата, а другой - кинематически связан со следящим щупом индуктивного датчика натяжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления мотальным автоматом | 1988 |
|
SU1558842A1 |
| Устройство для измерения длины наматываемой нити и измерительная головка | 1981 |
|
SU1124177A1 |
| Устройство для регулирования скорости намотки нитей | 1981 |
|
SU1341137A1 |
| Привод агрегата для производстваХиМичЕСКиХ МОНОНиТЕй | 1978 |
|
SU844641A1 |
| Бесфрикционное намоточное устройство | 1989 |
|
SU1694470A1 |
| Устройство для регулирования скорости намотки нити | 1975 |
|
SU553183A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТОКА ВОЗБУЖДЕНИЯ ТОРМОЗЯЩИХ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ТЕПЛОВОЗА | 2011 |
|
RU2475375C1 |
| ПРЯДИЛЬНАЯ МАШИНА | 1993 |
|
RU2068890C1 |
| Устройство для регулирования скорости намотки нити | 1976 |
|
SU602456A1 |
| Устройство для регулирования натяжения нити | 1989 |
|
SU1706949A1 |
1.УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ НИТИ НА МОТАЛЬНОМ АВТОМАТЕ, содержащее источник питания, nepBuui выходом подключенный к асинхронному электродвигателю, установленному на корпусе Мотального автомата и кинематически связанному с мотальной головкой, задатчик натяжения, индуктивные датчики натяжения нити и диаметра паковки, каждый из которых включает следящий щуп, жестко связанный с экранирующей пластиной, выходную обмотку и автогенераторную обмотку, задатчик диаилетра паковки и датчик обрыва нити, подключенные к первому входу блока управления , первым выходом соединенного с первьм входом источника питания, второй вход которого связан с выходом блока формирования управляющего сигнала, отличающееся тем, что, с целью повышения точности и расширения диапазона регулирования натяжения, оно имеет корректирующий блок и, сумматор, а источник питания выполнен в виде транзисторно-магнитного преобразователя частоты трехфазного тока при этом выходные обмотки индуктивных датчиков натяжения нити и диаметра паковки через сумматор связаны с первым входом блока формирования управляющего сигнала, вторым входом соединенного с вторьм выходом источника питания, а выходомдополнительно с первым входом корректирующего блока, второй вход которого дополнительно соединен с выходной обмоткой индуктивного датчика диаметра паковки, третий - с вторым выходом блока управления четвертый дополнительно с вторым выходом источника питания, а выходом - с третьим входом источника питания. 2.Устройство по П.1, о т л и чающееся тем, что транзисторно-магнитный преобразователь частоты трехфазного тока состоит из выпрямителя, регулятора напряжения, инвертора, трехфазного автогенератора и управляющего блока, при этом первый выход выпрямителя связан с вторым входом блока формирования управляющего сигнала и с четвертым входом корректирующего блока, второй -выход вы- I прямителя соединен с первыми вхо(Л дами управляющего блока и трехфазного автогенератора, третий выход выпрямителя подключен к первЬму входу регулятора напряжения, вторым вхо дом связанного с выходом управляющего блока, а выходом - с первым входом инвертора и с вторым входом трехфазного автогенератора, третий вход которого соединен с выо ходом корректирукяцего блока, а выход - с вторым входом инвертора, выND ходом подключенного к асянхронному электродвигателю, причем вход выпрямителя связан с первьич выходом блока управления, а второй вход упЮ равляющего блока соединен с выходом блока формирования управляющего сигнала . 3.Устройство П.1, отличающее с я тем, что, с целью упрощения конструкции устройства, автогенераторная обмотка выполнена с зазором между выходными обмотками индуктивных датчиков натяжения нити и диаметра паковки, а экранирующая пластина каждого индуктивного датчика расположена в зазоре между автогенераторной обмоткой и соответству ющей выходной обмоткой.
Изобретение относится к оборудованию для производства и переработки нитей в промышленности химических волокон и текстильной промышленности, в частности к регулируемому электроприводу намоточных механизмов с поддержанием заданного натяжения нити.
Известно устройство для регулирования натяжения нити на мотальном автомате, содержащее источник питания, первым выходом подключенный к асинхронному электродвигателю, установленному на корпусе мотального автомата и кинематически связанному с мотальной головкой, задатчик натяжения, индуктивные датчики натяжения нити и диаметра паковки, каждый из которых включает следящий щуп, жестко связанный с экранирующей пластиной выходную обМотку и автогенераторную обмотку, задатчик диаметра паковки и датчик обрыва нити, подключенные к первому входу блока управления, первым выходом соединенного с первым входом источника питания, второй вход которого связан с выходом блока формирования управлякмцего Ьигнала 1 .
Недостатками устройства являютс низкая точность и малый диапазон регулирования натяжения.
Цель изобретения - повышение точности, расширение диапазона регулирования натяжения и упрощение конструкции устройства.
Поставленная цель достигается те что устройство, содержащее источник питания, первым входом подключенный к асинхронному электродвигателю, установленному на корпусе мотального автомата и кинематически связанному с мотальной головкой, задатчик натяжения, индуктивные датчики натяжения нити и диаметра паковки, каждый из которых включает следящий щуп, жестко связанный с экранирующей пластиной, выходную обмотку и автогенераторную обмотку, задатчик диаметра паковки и датчик обрыва.нити, подключенные к первому входу блока управления, первым выходом соединенного с первым входом источника питания, второй вход которого связан с выходом блок
формирования управляющего сигнала, оно имеет корректирующий блок и сумматор, а источник питания в.ыполнен в виде транзисторно-магнитного преобраз ователя частоты трехфазного тока, при этом выходные обмотки индуктивных датчиков натяжения нити и диаметра паковки через сумматор связаны с первым входом блока формирования управляющего сигнала, вторым входом соединенного с вторым выходом источника питания, а выходом - дополнительно с первым входом корректирующего блока, второй вход которого дополнительно соединен с выходной обмокой индуктивного диаметра паковки, трети:й - с вторьвл выходом блока управления, четвертый - дополнительно вторым выходом источника питания, а выходом - с третьим входом источника питания.
Кроме того, транзисторно-магнитны преобразователь частоты трехфазного тока состоит из выпрямителя, регулятора напряжения, инвертора, трехфазного автогенератора и управляющего блока, при этом первый выход выпрямителя связан с вторым входом блока формирования управляющего сигнала и с четвертым входом корректирующего блока, второй выход выпрямителя соединен с первыми входами управляющего блока и трехфазного автогенератора, третий выход выпрямителя подключен к первому входу регулятора напряжения, вторьм входом связанного с выходом управлякицего блока а выходом - с первьм входом инвертор и с вторым входом трехфазного автогенератора, третий вход которого сое- динен с выходом корректирующего блока, а выход - с вторым входом инвертора ,- выходом подключенного к асинхронному электродвигателю, причём вход выпрямителя связан с первым выходом блока управления, а второй вход управляющего блока соединен с выходом блока формирования управляющего сигнала, i
При этом автогенераторная обмотка выполнена с зазором между выходными обмотками индуктивных датчиков натяжения нити и диаметра паковки , а экранирующая йластина каждого индуктивного датчика расположена в зазоре между автогенераторной обмоткой и соответствующей выходной обмоткой.
Кроме TQro, задатчик натяжений вьтолнен в виде регулируемой пружины один конец которой жестко соединен с корпусом мотального автомата, а другой - кинематически связан со следящим шупом индуктивного датчика натяжения.
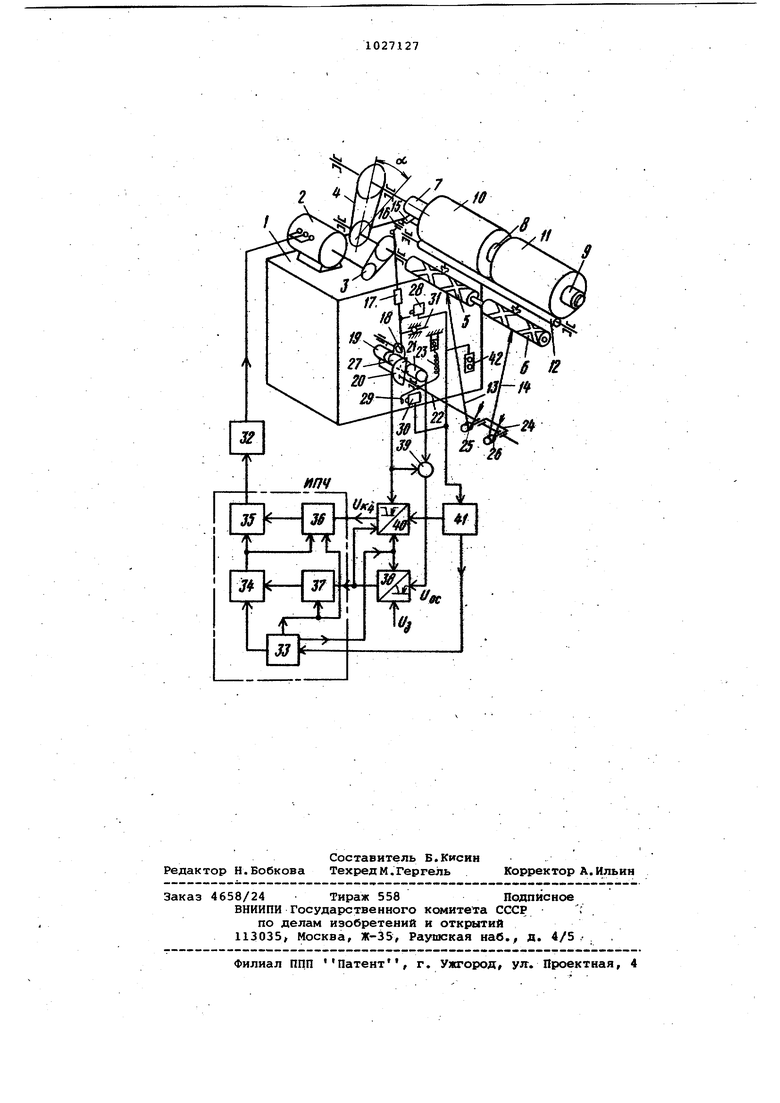
На чертеже изображено предлагаемо устройство.
На корпусе 1 мотального .автомата установлен асинхронный электродвигатель 2, связанный через ременные пердачи 3 и 4 соответственно с валом барабанов нитераскладников 5 и 6 и шпинделем 7, несущим патроны 8 и 9 с бобинами (паковками)- 10 и 11. К бобинам прилегают свободно вращающийся прикаточный валик 12, обеспечиваихций качественную раскладку и намотку нитей 13 и 14 в бобины.
К шпинделю 7 мотальной головки, oтклoняющeмVcя при увеличении диаметра бобин на угол с6, прилегает следящий щуп 15, который установлен ..на оси 16 и соединен через тягу 17 гибкой связью с экранирующей пластиной 18 индуктивного датчика 19 диаметра паковки. Другая экранирующая пластина 20 индуктивного датчика 21 натяжения нити установлена на качающейся оси 22, связанной с одной стороны с пружиной23, выполняющей роль задатчика натяжения, а с другой - с рычагом 24, на котором установлены свободно вращающиеся ролики 25 и 26, огибаемые наматываемыми нитями 13 и 14. Между экранирующими пластинами 18 и 20 расположена автогенераторная обмотка 27, общая для выходных обмоток датчиков 19 и 21. Роль следящего щупа датчика 21 выполняет ось 22.
Регулируемая тяга 17 снабжена упором, воздейству.ющим на микро- . выключатель 28 (задатчик) заданного диаметра паковки. Храповик 29, установленный на оси 22, взаимодействует с микровыключателем 30 (датчиком) обрыва или отсутствия наматываемой нити. Тяга 17 шарнирно соеди.нена с регулируемым рычагом 31.
Электродвигатель 2 через согласующий трансформатор 32 связан с выходом источника питания транзисторномагнитного преобразователи частоты трехфазного тока (ИПЧ). Источник. питания включает в себя выпрямитель 33, регулятор 34 напряжения, инвертор 35, управляемый трехфазным автогенератором 36, выполненным на одном трансформаторе с пространственнораспределенным магнитопроводсм, и управляющий блок 37.
Вход блока 37 соединен с выходом блока 38 формирования управляющего сигнала, линия обратной связи которого через сумматор 39 соединена с выходами датчика 21 натяжения нити и датчика 19 диаметра паковки.
Автогенератор 36 связан с выходом корректирующего блока 40, вход кото,рого соединен с датчиком 19 диаметра паковки и блоком 41 управления. По0следний сблокирован с микровьжлючателями 28 и 30 и кнопками 42 управления.Устройство работает следующим образом.
В исходном состоянии с помощью
5 пружины 2,3 устанавливается заданное натяжение нити. Наматываемые нити 13 и 14 с питающих бобин или галет прядильной машины проходят через нитепроводникй и компенсационные ролики
0 25 и 26, связанные с датчиком 21 натяжения нити, и заправляются в щели нитеводителей кулачковых раскладников 5 и б. Затем нити проходя под прокаточным валиком 12 и наматываются
5 на патроны В и 9.
После заправки нитей на патроны с помощью кнопок 42 включается привод намоточного механизма. Питание лрс 4ьшигенной частоты через блок 41
0 подается на выпрямитель 33 транзисторногмагНитно1 о преобразователя ИПЧ, преобразукжцего его в переменный ток згщанной частоты.
Промежуточное преобразование осуще5ствляет регулятор 34 напряжения, по- следующее - инвертор 35. Величина выходного напряжения U преобразователя- обеспечивается регулятором 34 напряжения, управляемьм блоком 37. Регулирование выходной частоты f
0 преобразователя осуществляется трехфазным автогенератором 36, собранным на одном трансфо1 1аторе с пространстэенно- распределенным магнитопроводом.
5
Значение частоты f задающего генератора определяется уровнем напряжения на выходе регулятора 3.4 образом, что преобразователь в установившемся режиме реализует
0 закон регулирования в виде U/f const.
С выхода преобразователя ИПЧ напряжение заданного уровня и частоты подаются через согласующий
5 трансфо1 1атор 32 на электродвигатель 2.
Сигнал задания U- устанавливается ручныл зсщатчиком блока 38 формирования управляющего сигнала. При этом .выходная частота преобразова0теля регулируется до такого з.начения, при котором электродвигатель 2 обеспечивает линейную скорость на мотки, несколько превышающую скоjfXDCTb ьодачи нити с питающих галет. Разность этих скоростей определяет величину натяжения наматьшаемых нитей, которая, воздействуя на рычаг 24, уравновешивает момент пово рота оси 22 под действием задающей пружины 23 в горизонтальном положении ксн4пенсационных роликов 25 и 26. При изменении положения ролик сигнал рассогласования между заданньлл значением U и сигналом обратной связи lf}c. t снимаемым с датчика натяжения нити, сформированный в блоке 38, поступая в блок 37 и соответствующим образом автоматически 1регулирует частоту вращения приводн го двигателя. Этим поддерживается величина заданного натяжения нитей Для предотвращения обрывов нити во время пуска намоточного механизма устройство снабжено блоком 40 коррекции выходной частоты преобразователя, обеспечивающим плавный разгон электродвигателя в момент пу ка механизма. Соотношение U/f при этом изменяется. Сигнал коррекции частоты с блока 40 поступает в цепь управления автогенератора 36. Уровен, длительность и крутизна изменения этог сигнала зависят от диаметра бобин, скорости приемки и прочности нити. Это обеспечивается связью блока 40 с датчиком 19 диаметра паковки, выходом блока 38 формирования управляющего сигнала и блоком 41 управления. Для улучшения качества намотки формируемых паковок по мере увеличения их диаметра необходимо снижать по линейному закону заданное натяжение нити. Это осуществляется с помощью датчика 19 диаметра паковки, экранирующая пластина 18 которого, кинематически связанная со щупом 15, по мере отклонения щпинделя 7 на угол выводится ИЗ азора датчика 19 увеличивая тем самьвм его выходной . сигнал. В сумматоре 39 сигнал датчика диаметра алгебраически складывается с сигналом датчика натяжения нити. Соответствующим образом скорректированный сигнал датчика натяжения нити по линии обратной связи поступает в блок 38 формирования сигнала управления, уменьшая первоначально установленную разность скоростей питающих галет и намоточного ме: анизма. При этом компенсирующие ролики 25 и 26 опускаются до нового положения равновесия, снижая тем ссильм величину растягивающего усилия задающей пружины 23. При наработке заданного диаметра паковок срабатывает микровыключатель 28 и чере блок 41 отключает питание электродвигателя 2. Обрыв или сход нитей вызывает поворот хвостовика 29, закрепленного на оси 22, под действием которюго срабатывает микровыключатель 30, отключая привод механизма. Экономический эффект от использования предлагаемого устройства определяется высокой точностью и больщим диапазоном регулирования натяжения нити.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
