134 г
Изобретение относится к текстиль-i ной промышленности, конкретнее к сновальным машинам.
Цель изобретения -.повышение точ- с ности регулирования путем обеспечения инвариантности к изменениям момента инерции на валу электродвигателя паковки.
На фиг. 1 показана блок-схема уст- 10 ных цепей. Входы ключей 43 и 44 обройства; на фиг, 2 - принципиальная электрическая схема устройства.
Устройство содержит наматывающий вал 1, на который наматываются нити 2, образуя паковку 3, Нити 2 огибают измерительный ролик 4, с которым кинематически связан датчик 5 скорости материала. Электродвигатель 6 паковки имеет датчик 7 тока, связанный с управляемым источником 8 питания. Датчики 5 и 7 подключены к входам корректирующего блока 9, выходы которого связаны с соответствующими входами блока 10 управления, Задат- чик 11 скорости материала подключен к входу задатчика 12 интенсивности изменения скорости материала.
Блок 10 управления состоит из последовательно включенных сумматора 13 и компаратора 14, При зтом выход компаратора 14 связан с входом источника 8,
Задатчиком 11 является переменный резистор 15,
Задатчик 12 выполнен в виде включенных последовательно и охваченных отрицательной обратной связью компаратора 16 и интегратора 17, Компара- «тор 16 задатчика 12 выполнен на операционном усилителе (ОУ) 18 с резисторами 19 - 22 на входе. Интегратор 17 задатчика 12 выполнен на операционном усилителе 23 с резистором 24 на входе и конденсатором 25 в цепи обратной связи. Выход интегратора 17 цепью 26 обратной связи связан с входом компаратора 16,
Сумматор 13 блока 10 выполнен на операционном усилителе 27 и резисторах 28 - 34, а компаратор 14 - на операционном усилителе 35 с резистором 36 на входе.
Источник 8 выполнен в виде подключенного к сети переменного тока выпрямителя, собранного по мостовой схеме на диодах 37 - 42 и двух последовательно соединенных управляемых (например, транзисторных) ключах 43 и 44, подключенных к выходу
372
выпрямителя. Параллельно ключу 44 подключены последовательно соединенные якорь электродвигателя 6 постоянного тока и датчик 7 тока. Датчик 7 может быть выполнен по известной схеме, например, в виде шунта, подключенного к усилителю с гальваническим разделением входных и выходразуют управляющий вход источника 8 и цепью .45 подключены к выходу компаратора 14 блока 10,
Корректирующий блок 9 состоит из сумматора 46 . и двух интеграторов - 47 и 48,
Первый интегратор 47 собран на операционном усилителе 49, резисторах 50 и 5Г и конденсаторе 52, Один из входов первого интегратора 47 подключен к датчику 5 скорости (например, тахогенератору), второй вход - к выходу второго интегратора 48, а выход первого интегратора 47 подключен к входу сумматора 46,
Сумматор 6 выполнен на-операционном усилителе 53 и резисторах 54 - 60, Вход сумматора 46 подключен к датчику 7 тока, датчику 5 скорости и выходам интеграторов 47 и 48, Выход сумматора 46 подключен к входу второго интегратора 48,
Второй интегратор 48 собран на операционном усилителе 61, резисто- ре 62 и конденсаторе 63,
Выходы сумматора 46 и интегратора 48 являются выходами блока 9 и подключены к входу сумматора 13 блока 10,. Блок 9 пр,едставляет собой динамическую систему с обратной связью, которая на основе сигнаитов и Уде датчиков 7 тока и 5 скорости восстанав dV ливает величины -т- и V в виде их
dV оценок - напряжений -т и V (V -скоdt
рох;ть материала,
В основе построения блока 9 лежат
следующие известные соотношения,
Связь между линейной скоростью V намотки и угловой скоростью Л- двига- теЛя определяется формулой
V ,
а электродвигатель описан системой дифференциальныз уравнений:
- л
--i - - JL Т Ья
+ -Ди L
(1)
- IM + iS«i
dt A+ j Ч.
где If - ток электродвигателя 6;
Kf, - коэффициент усиления источника 8;
Тя - постоянная времени электродвигателя 6;
Kf и Kf - постоянные коэффициенты; J - суммарный.момент инерции
на валу электродвигателя 6; M - момент -сопротивления нагрузки на валу электродвигателя 6;
Lj( - индуктивность; -i - передаточное число от вала электродвигателя 6 к наматывающему валу 1; и - напряжение.
При намотке тонких материалов, в частности нитей в сновальной машине процесс изменения радиуса R паковки 3 протекает значительно медленнее, чем процессы изменения угловой скорости в переходных режимах. Поэчто
dR
dt R d JI
a 0 и, следо
dt
a с учетом (2)
.-|-rMc S i,.
dt
J-i
Ji
, Известно, что момент сопротивле- |ния нагрузки (Uj..) состоит из двух ;составляющих: момента сил трения в наматывающем механизме и момента силы натяжения нитей 2, Изменение первой составляющей происходит весьма медленно и обусловлено, главным образом, износом механизма и ухудшением смазки. Натяжение наматывающих нитей 2 обычно поддерживается приблизительно постоянным с помощью ните натяжнык устройств (например, в сновальной машине), Поэтому изменение момента силы натяжения обусловлено лшпь изменением радиуса паковки 3, т.е. происходит тоже весьма медленно. Поэтому принимают
dt -
Уравнения (3) и (4) положены в основу построения блока 9, которьй описывается следующей системой уравнений :
dv . K.L Я,+ .
dt Ji - JiKftT -Ы СКзид - К,Оде).
;
-10
15
20
25
ЗА 1137 ,
1г( К„й), (5)
где й,е If V; 5
и -i V
R V,
U(jT I ;
4 - масштабные коэффициенты; АС. коэффициент передачи
датчика 5 скорости; Кдт - коэффициент передачи
датчика 7 тока. Коэффициенты 1 и l. обратной связи по ошибке оценки 11,. 0де выбраны такими, чтобы динамическая система (5) бьша асимптотически устойчива и чтобы процессы в блоке 9 протекали значительно (например, на порядок) быстрее процессов в объектах 3 и 4.
Устройство работает следующим образом,
Регулирование скорости намотки в предлагаемом устройстве осуществляют путем согласованного замыкания и размыкания ключей 43 и 44 источника 8 питания. При этом якорь двигателя 6 с датчиком 7 тока могут быть подключены ключом 43 к выходу выпрямителя на диодах 37 - 42 либо отключены от него и зашунтированы ключом 44. Заданное значение линей- 35 ной скорости устанавливают задатчи- ком 11 (резистором 15). Выходной сигнал задатчика 11 поступает на вход компаратора 16 задатчика 12, где происходит сравнение этого сиг- 40 нала с сигналом обратной связи, поступающим на второй вход компаратора 16 по цепи 26 с выхода интегратора 17. Если, например , первый сигнал больше второго, то происходит 45 переключение компаратора 16 и изменение выходного сигнапа интегратора 17 до тех пор пока он не достигнет величины сигнала задатчика 11 скорости (напряжения на подвижном контакте 50 резистора 15). С помощью задатчика 12 ограничивают темп изменения сигнала заданного значения скорости. Сигнал заданного значения линейной скорости Vj с выхода интегратора 17 55 и сигнал производной от заданного
30
вызначения линейной скорости -dt
хода компаратора 16 задатчика 12 поступают на вход сумматора 13 блока
,1341
где они суммируются с сигналами
-
и V, поступающими с выхода бло-
9, Сумматор 13 блока 10 формиру- сумму сигналов
S - Сх,
dt
(6)
S
где - ошибка регулирования; С О - постоянный коэффициент;
- выходной сигнал сумматора 13,
При S О происходит переключение компаратор а 14 блока 10. Выходной сигнал компаратора 14 по цепи 45 поступает на управляющий вход источника 8 питания и переключает ключи 43 и 44 (например, замыкает ключ 43 и размыкает ключ 44). В результате этого происходит соответствующее изменение (например, увеличение) напряжения якоря электродвигателя 6 угловой скорости наматывающего вала 1, линейной скорости нитей 2, угло- вой скорости измерительного ролика 4 и выходных сигналов датчиков 7 тока и 5 скорости. Эти сигналы поступают на вход блока 9, в котором в соответствии с уравнениями (5) происходит быстрое восстановление
dV
сигналов оценок -;- и V и изменение dt
этих сигналов в соответствии с изме- V
dV
нением -:- и dt
в сторону уменьшения
сигнала S, т,е. S- +0, При процесс происходит аналогично, однако характер изменения сигналов со ответствует S -О (отрицательная величина S стремится к нулю уменьшаясь по абсолютной величине), При выполнении условия существования скользящего режима, которое сводитс
к выполнению Неравенств dS „
---О при
J С
и при , в системе
возникает режим высокочастотных переключений, при котором SsfcO, т,е, в соответствии с (6)
-- dt
Сх О
(7)
Решение этого уравнения определяет характер переходного процесса изменения ошибки по скорости, т,е, качество регулирования
x(t) х,1- (8)
6
5
0
5
0
5
0
5
0
5
где Хд - величина ошибки в момент возникновения скользящего режима.
Из (8) следует, что.устройство обеспечивает апериодический характер переходного процесса с заданной постоянной времени Т -, которая не заVj
1висит от параметров объекта, - при нулевой ошибке в установившемся ре- ясиме x(t) Vj-V О при t- ,
Условие существования скользящего режима в предлагаемом устройстве
(з- ь. О при S О и - -СО при dtdt
S 0) выполняют путем выбора выходного напряжения выпрямителя источника 8 питания.
При изменении радиуса паковки 3 . в процессе намотки нити 2 происходит изменение параметров, а параметры блока 9 (коэффициенты сумматора 46. содержащие R,, и J) остаются постоянными , Однако это не приводит к снижению качества регулирования скорости, так как медленное изменение параметров R, J в процессе намотки паковки приводит к появлению ошибки оценки - разности сигналов () и соответствующему изменению выходного сигнала интегратора 4 блока 9. Таким образом, происходит компенсация влияния изменения параметров объекта на качество оценки линейной скорости и ее производной. Поскольку процессы в блоке 9 протекают значительно быстрее процессов изменения, параметров Rj« J и переменных объекdVта, то значения оценок -- и V
dt практически всегда соответствуют факdV
и
V. Таким образом качество переходного процесса всегда соответствует желаемому в соответствии с (8), Формула изобретения
1, Устройство для регулирования скорости намотки нитей, преимущественно на сновальной машине, содержащее последовательно включенные за- да,тчики скорости материала и интенсивности ее изменения, блок управления, управляемый источник питания электродвигателя паковки и датчики скорости материала и тока электродвигателя, отличающееся тем, что, с целью повышения точности регулирования путем обеспечения
тическому значению переменных -dt
1
инвариантности к изменениям момента инерции на валу электродвигателя паковки, оно снабжено корректирующим блоком, а блок управления состоит из сумматора и компаратора, при этом выходы задатчика интенсивности изменения скорости и корректирующего блока через сумматор и компаратор связаны с управляемым источником питания, а выходы датчиков скорости материала и тока электродвигателя соединены соответственно с первым и вторым входами корректирующего блока.
2, Устройство по п. 1, о т л и - чающееся тем, что корректи
378
рующий блок состоит из сумматора и интеграторов, при этом объединенные первые входы сумматора и первого интегратора являются первым входом корректирующего блока, вторым входом которого является второй вход сумматора, третьим и четвертым входами связанного с выходами соответствующих интеграторов, причем выход сумматора соединен с входом второго интегратора, выход которого подключен к второму входу первого интегратора, причем выходы сумматора и второго интегратора являются выходами корректирующего блока.
Фае. 2
Редактор Л. Веселовская
Составитель Б, Кисин
Техред М.Ходанич Корректор И, Эрдейи
Заказ 4392/27Тираж 590Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации натяжения нитей при перемотке | 1985 |
|
SU1279934A1 |
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ СНОВАЛЬНЫХ ВАЛОВ | 2012 |
|
RU2499758C1 |
| Устройство для регулирования натяжения при намотке длинномерного материала | 1988 |
|
SU1627488A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ СНОВАЛЬНЫХ ВАЛОВ | 2011 |
|
RU2493088C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ СНОВАЛЬНЫХ ВАЛОВ | 2013 |
|
RU2537145C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ СНОВАЛЬНЫХ ВАЛОВ | 2010 |
|
RU2423562C1 |
| Устройство для регулирования натяжения нити на мотальном автомате | 1981 |
|
SU1027127A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ПЛОТНОСТИ НАМОТКИ ГИБКОГО МАТЕРИАЛА | 2014 |
|
RU2564875C1 |
| Устройство для контроля процесса намотки длинномерного материала в паковку | 1987 |
|
SU1440972A1 |

Изобретение относится к текстильной промышленности, конкретнее k сновальным машинам. Целью изобретения является повышение точности регулирования путем обеспечения инвариантности к изменениям момента инерции на валу электродвигателя паковки. Характерной особенностью устройства является наличие в нем корректирующего блока 9 связанного с датчиками 5 и 7 скорости материала и тока электродвигателя 6 паковки 3, Блок 9 на основе сигналов с датчиков 5 и 7 позволяет получить скользящий режим работы устройства путем оценки сигнала линейной скорости материала и ее производной. Сигнал Vg. заданного значения .скорости материала и сигнал dVj/dt с выходов задатчиков 11, 12 скорости и интенсивности ее изменения поступают на вход сумматора 13 блока 10 управления, где они суммируются с выходными сигналами блока 9, Выходной сигнал S блока 10 равен S dx/dt+Cx, где х - ошибка регулирования, - постоянный коэффициент. Условие существования скользящего режима (dS/dt О при S 0 и dS/dt О при S 0) выполняется путем выбора требуемого напряжения управляемого источника 8 питания, 1 з.п, ф-лы, 2 ил, 2 с Ф (Л со it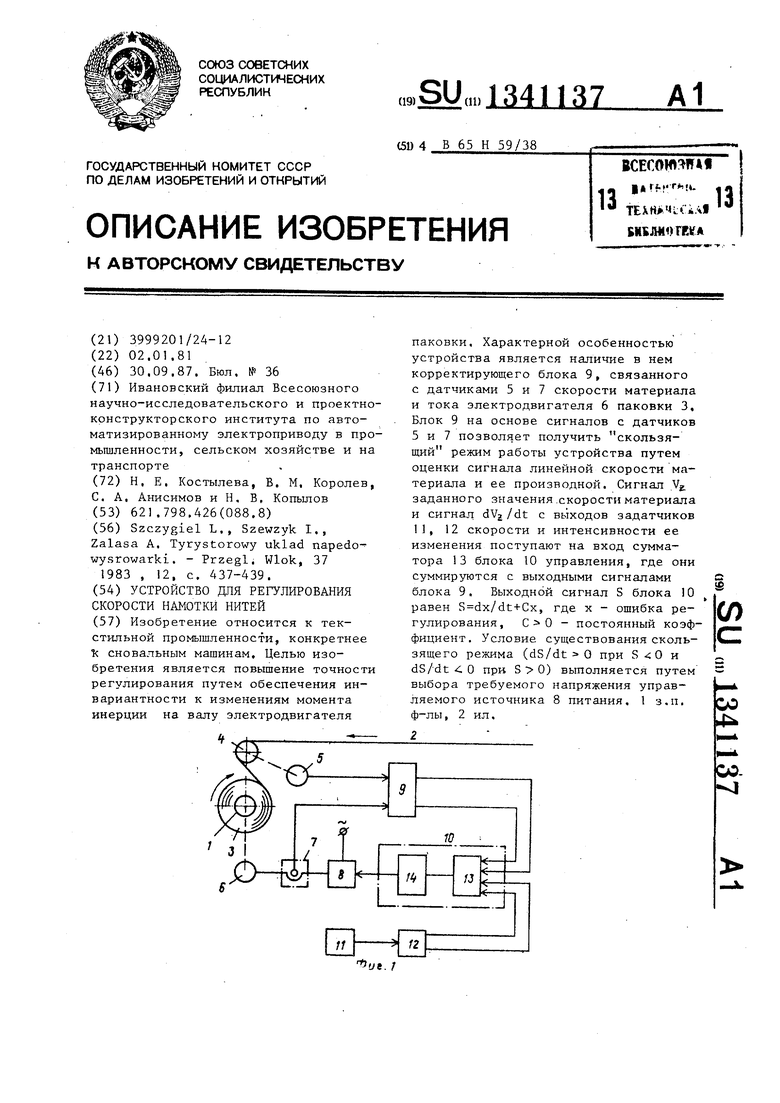
| Szczygiel L., Szewzyk I., Zalasa A | |||
| Tyrystorowy uklad napedo- wysrowarki, - Przegl | |||
| Wlok, 37 1983 , 12, c | |||
| Способ образования окрасок на волокнах | 1925 |
|
SU437A1 |
