Изобретение относится к весоизмерительной технике, в частности к устройствам для взвешивания железнодорожных вагонов на ходу в составе поеда..Известны весы для потележечного взвешивания вагонов, содержащие весовую платформу, опирающуюся на силоизмерительные датчики, подключенные к вычислительному блоку, с которым связаны также путевые сигналы
Недостаток этого устройства заключается в большом количестве исползуемых путевых сигнализаторов, что снижает его надежность.
Наиболее близким к предлагаемому является устройство для потележечного взвешивания вагонов в движении, содержащее датчики наезда и выезда осей, .подключенные к блоку управлени весовую платформу, опирающуюся на силоизмерительные датчики, подключенные к автокомпенсатору с блоком равновесия и распределителем, имеющим ключи ввода кода, и вычислительный блок, подключенный к выходам автокомпенсатора 2 ,
Недостаток известного устройства заключается в применении шести путевых датчиков, требующих ремонта и ухода и имеющих недостаточную надежность, в особенности на путях перевозки шихты, жидкого металла и слитков.
в известных системах взвешивания на ходу применяются путевые датчики, приводимые в действие ребордами колес. Реборды колес имеют значительный технологический разброс, что ужесточает требования к путевым датчикам и приводит к их частым поломка
Кроме того, путевые датчики в ycловиях реально движущегося состава ( т.е. пробуксировками, торможением, сдачей назад и т.д.) дают ложные срабатывания.
Электронная схема управления устройства громоздка, сложна логически и доступна в обслуживании только специалисту высокой квалификации.
Цель изобретения - повышение надежности устройства путем упрощения схемы распознавания вагонов по их осности.
Поставленная цель достигается тем что в устройствоДЛЯ потележечного взвешивания вагонов в движении, содержащее датчики наезда и выезда осей, подключенные к блоку управления, весовую платформу, опирающуюся ма силоизмерительные датчики, подключенные к автокомпенсатору с блоком равновесия и распределителем, имею«им ключи ввода кода, и вычислительный блок, подключенный к выходам автокомпенсатора, введены датчик нуля автокомпенсатора, ключ синхрониэацииИ ключ Равно, а блок управления выполнен в виде реверсивного счетчика, триггера, ключа гашения и конденсатора, причем датчик наезда осей соединен с блоком равновесия автокомпенсатора, с шиной вычитания реверсивного счетчика и через ключ гашения с шиной Сброс этого счетчика, к шине сложения которого подключен датчик выезда осей, датчик нуля автокомпенсатора подключен к счетному входу триггера, прямой выход которого зашунтирован конденсатором и подключен к управляющему входу ключа Равно, другой управляющий вход которого подключен к ключу синхронизации, инверсный выход триггера подключен к управляющему входу ключа гашения, а выход реверсивного счетчика через ключ Равно соединен с вычислительным блоком и входом Сброс триггера.
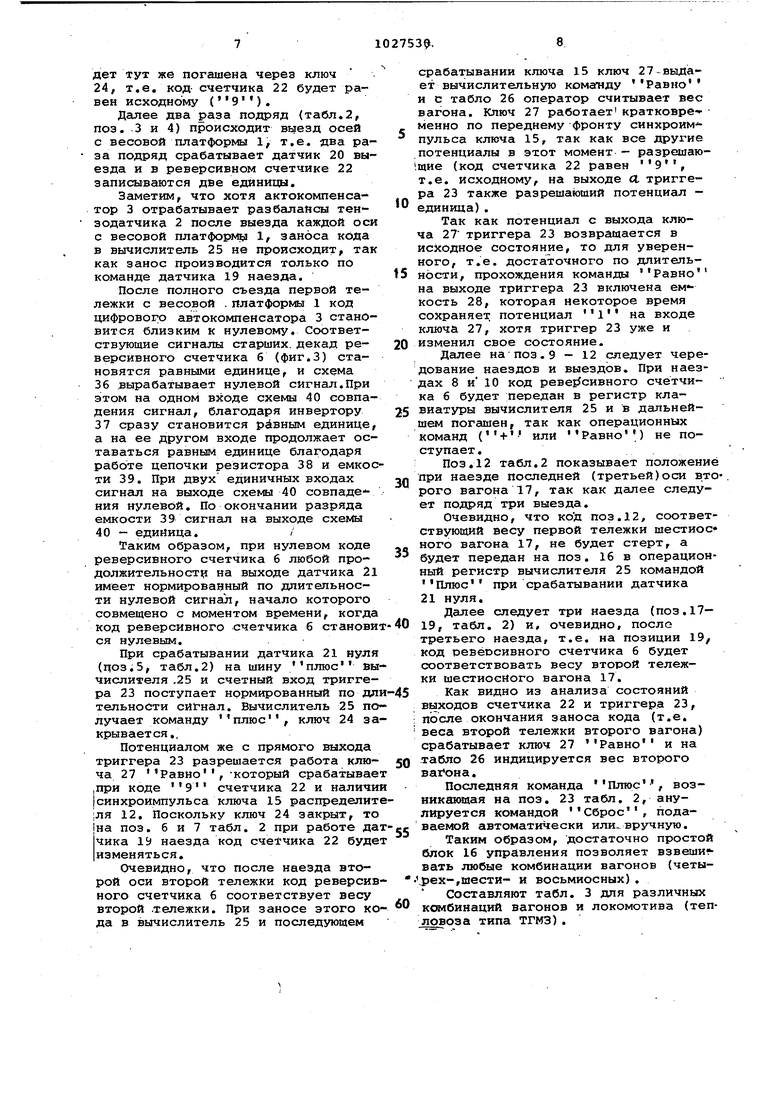
На фиг. 1 показана блок-схема устройства для потележечного взвешивания вагонов в движении; на фиг. 2 - электрическая принципиальная схема датчика наезда (выезда); на фиг. 3 - блок-схема датчика нуля.
Устройство для потележечного взвешивания вагонов в движении содержит платформу 1, установленную на тензодатчики 2, подключенные к цифровому автокомпенсатору 3, имеющему в своем составе элемент 4 сравн.ения, нульорган 5, реверсивный счетчик 6, заполняемый импульсами генератора 7 через блок 8 скорости компенсации по командам сигнализатора 9 грубого неравновесия, преобразователь 10 код-аналог, блок 11 равновесия, распределитель 12 и ключи 13 - 15. Через преобразователь 10 код-аналог сигнал, пропорциональный коду реверсивного счетчика б, поступает на элемент 4 сравнения.
По команде блока 11 равновесия сигналы, адекватные коду реверсивного счеу-чика б, поступают благодаря работе распределителя 12, после срабатывания ключа 13 сброса на ключи 14 ввода кода (в количестве 10 числу цифр от О до 9). Последним срабатывает ключ 15 синхронизации. i
К входам блока 16 управления,выдающего команды на суммирование веса тележек вагонов 17, движущихся по железнодорожному пути 18, подсоединены датчик 19 наезда осей, подключенный также к блоку 11 равновесия, датчик 20 щаезда осей и датчик 21 нуля цифровог автокомпенсатора. В состав блока 16 управления входят реверсивный счетчик 22, триггер 23 и ключ 24, управляемый триггером 23.
Суммирование веса тележек производится в вычислителе 25 с цифровым тat5лo 26, На входы вычислителя 25, креме упомянутого ключа 13 (команда
Сброс клавиатуры ) и ключей 14 ; в&ода цифрового кода, подсоединен
также ключ 27 команды уР ВИо прямому выходу триггера 23 подсоеди-. иена емкость 28.
Йитание:табло 26i производится че- 5 рез высоковольтный ключ 29, управляемый триггером 30 индикации, входы которого подсоединены к входу ключа 27 и датчика 19 наездов (вход А на фиг. 1).10
Датчик 19 Haesjtta (фиг. 2) содержит оперативньё усилитель 31,вход которого объединен с входом нуль-органа 5 (в этом в,ианте; вьшолиения) транзистор , 32 формирования уровня, инвертор 33, i5 схему 34 совпадения и триггер 35,
Датчик 20 выезда .отличается от датчика 19 наезда только включениетл реа истора (на фиг. 2 показано пуйктиром), соединяющего вход операционного уси- jO литёля 31 с ; нйусом питания. На вход В схели 34совпадения постоянно посту пают синхр импуль сы,
в принципе конструкция датчиков 19 и 20 наезда и выезда осей может Ллть 25 иной, например, это могут быть и путевые датчики, установленные по краям весовой платформы .Iji По сравнению с прототипом в случае уменьшено количество путёвых датчиков (два вмес-,/ то шести),
Датчик 21 состоит из схемы 36 совпа-. дения входами подключенной к старшим декадам реверсивного очетчика б;Выход схемы 36 подключен к инвертору 37 и t Интегрирующей цепочке из езисто-
ра 38 и емкости 39. Выход инвертора 37 и емкость 39 подключены к схеме 40 совпадения, выход которой являетсй и выходом датчика 21
Устройство работает следующим ОСразом.,
При наличии единичных сигналов ,т .е. при нулевом коде счетчика 6) ни всех входах схемы 36 на.ее выходе появляется нулевой сигнал. На :выходе инвертора 37 единичный сигнал появляется сразу, а нулевой сигнал на емкости 39 - через промежуток времени, определяемый номина;лами резистора 38 и емкости 39.По этому выходной сигнал датчика 21 ;нормирован по длительности (укорочен) по сравнению с выходным сигналом схешл 36.
Таким образом, при длительном нулевом коде реверсивного счетчи ка 6 датчик 21 нуля выдает только короткий импульс.
В качестве вычислителя 25 могут алть использованы различнью настольные электронно-клавишные вычислител ные или цифропечатакпцие машины,что удицевляет устройство и ускоряет его внедрение ..
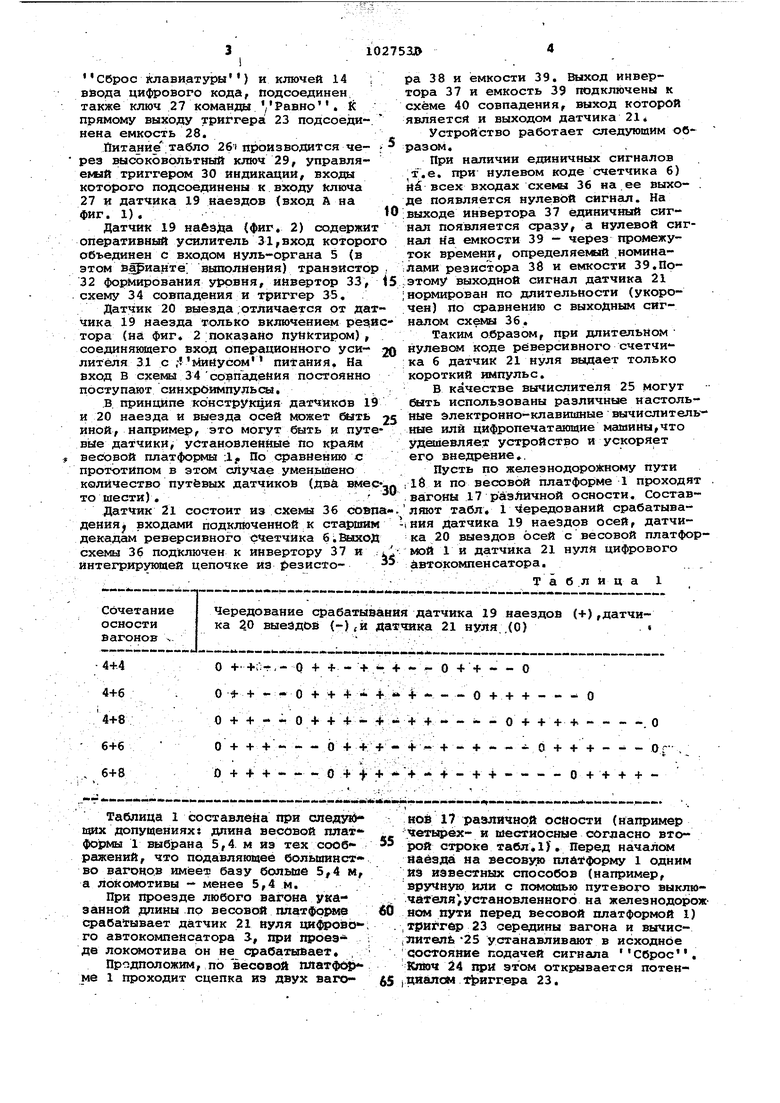
Пусть по железнодорожному пути ;l8 и по весовЫ платформе 1 проходя .вагоны 17 различной осности, Составляют табл. 1 чередований срабатыва-i ния датчика 19 наездов осей, датчи-ка 20 выездов осей с весовой платфомой 1 и датчика 21 нуля цифрового йвтокомпенсатора..
Та б .л и ц а

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1983 |
|
SU1078256A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Устройство для взвешивания железнодорожного подвижного состава во время движения | 1982 |
|
SU1046621A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Способ потележечного взвешивания вагонов на ходу | 1982 |
|
SU1016688A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| Устройство для поосного взвешивания подвижного состава | 1986 |
|
SU1315822A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |
| Устройство для повагонного взвешивания транспортных объектов на ходу | 1981 |
|
SU991176A1 |


Таблица 1 составлена при следзцидщих допущениях: длина весовой плат формы 1 выбрана 5,4. м из тех соображений, что подавляющее большинст во вагонов имеет базу больше 5,4 м, а локомотивы - менее 5,4 м.
При проезде любого вагона ука- занной длины по весовой платфоця е срабатывает датчик 21 нуля цифрово ; го автокомпенсатора 3., при проеэ де локомотива он не срабатывает. ,
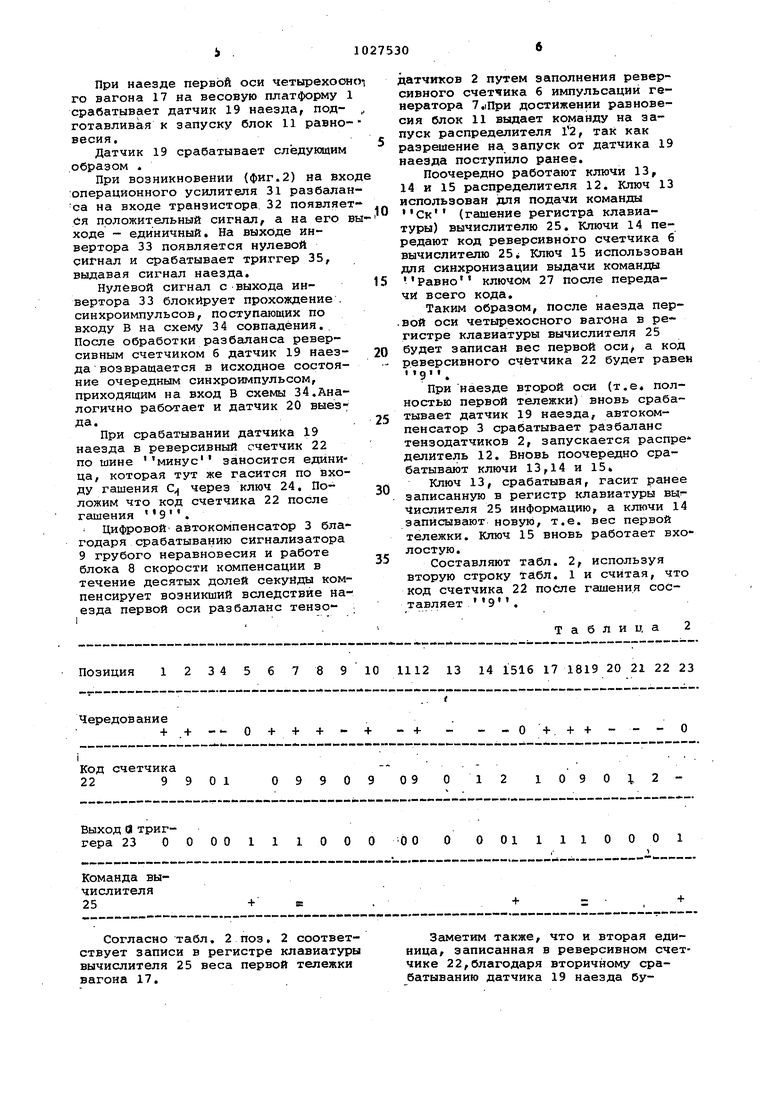
Предположим, по весовой ппатфо ме 1 проходит сцепка из двух ваго:НО8 17 раэлйчнрй осйости (например четырех- и шестиосные согласно второй строке табл), Перед началом йаёзда на весовуто платформу 1 одним ИЗ известных способов (например, вручн5ш или с помсяаыо путевого выключателя) установленного на железнодорож ном пути перед весовой платформой 1) , триггер 23 сер едины вагона и вычис|ЛИтелЬ23 устанавливают в исходное ; состояние подачей сигнала Сброс. ВЕпюч 24 при этом открывается потен(Циалом т1риггера 23. При наезде первой оси четырехоо го вагона 17 на весовую платформу срабатывает датчик 19 наезда, подготавливая к запуску блок 11 равно весия. Датчик 19 срабатывает следующим .образом . При возникновении (фиг.2) на вх :операционного усилителя 31 разбала са на входе транзистора 32 появляе ся положительный сигнал а на его ходе - единичный. На выходе инвертора 33 появляется нулевой сигнал и срабатывает триггер 35, выдавая сигнал наезда. Нулевой сигнал с выхода инвертора 33 блокирует прохождение . синхроимпульсов, поступающих по входу В на схему 34 совпадения.. После обработки разбаланса реверсивным счетчиком б датчик 19 наезда возвращается в исходное состояние очередным синхроимпульсом, приходящим на вход В схемы 34,Аналогично работает и датчик 20 выезда. При срабатывании датчика 19 наезда в реверсивный счетчик 22 по шине минус заносится единица, которая тут же гасится по входу гашения С через ключ 24. Положим что код счетчика 22 после гашения 9 . Цифровой автокомпенсатор 3 благодаря срабатыванию сигнализатора 9 грубого неравновесия и работе блока 8 скорости компенсации в течение десятых долей секунды компенсирует возникший вследствие наезда первой оси разбаланс тензопозиция 1 2 34 5 6 7 8 9 10 Код счетчика 229901 09909 09
Выход 19 триггера 23 0000111000
Команда вычислителя25
Согласно табл, 2 поз. 2 соответствует записи в регистре клавиатуры вычислителя 25 веса первой тележки вагона 17.
лица
Т а
О О
11000
О 01
Заметим также, что и вторая единица, записанная в реверсивном счетчике 22,благодаря вторичному срабатыванию датчика 19 наезда бу;цатчиков 2 путем заполнения ревер сивного счетчика б импульсации генератора 7.|При достижении равновесия блок 11 выдает команду на запуск распределителя Г2, так как разрешение на запуск от датчика 19 наезда поступило ранее. Поочередно работают ключи 13, 14 и 15 распределителя 12. Ключ 13 использован для подачи команды Ск (гашение регистра клавиатуры) вычислителю 25. Ключи 14 передают код реверсивного счетчика б вычислителю 25 Ключ 15 использован для синхронизации выдачи команды Равно ключом 27 после передачи всего кода. Таким образом, после наезда первой оси четырехосного вагона в регистре клавиатуры вычислителя 25 будет записан вес первой оси/ а код реверсивного счётчика 22 будет равен 9. При наезде второй оси (т.е. полностью первой тележки) вновь срабатывает датчик 19 наезда, автокомпенсатор 3 срабатывает разбаланс тензодатчиков 2, запускается распре делитель 12. Вновь поочередно срабатывгиот ключи 13,14и15 Ключ 13, срабатывая, гасит ранее записанную в регистр клавиатуры вы Числителя 25 информацию, а ключи 14 записывают новую, т.е. вес первой тележки. Ключ 15 вновь работает вхолостую. Составляют табл. 2, используя вторую строку табл. 1 и считая, что код счетчика 22 после гашения составляет1112 13 14 1516 17 1819 20 21 22 23 012 1090 2дет тут же погашена через ключ 24, т.е. код- счетчика 22 будет равен исходному (9 ) . Далее два раза подряд (табл.2, поз. 3 и 4) происходит выезд осей с весовой платформы 1, т.е. два раза подряд срабатывает датчик 20 выезда и в реверсивном счетчике 22 записываются две единицы. Заметим, что хотя актокомпенсатор 3 отрабатывает разбалансы тензодатчика 2 после выезда каждой оси с весовой платформу 1, заноса кода в вычислитель 25 не происходит, так как занос производится только по команде датчика 19 наезда. После полного съезда первой тележки с весовой . платформы 1 код цифрового автокомпенсатора 3 становится близким к нулевому. Соответствующие сигналы старших, декад реверсивного счетчика б (фиг.З) становятся равными единице, и схема 36.вырабатывает нуле.вой сигнал.При этом на одном входе схемы 40 совпадения сигнал, благодаря инвертору 37сразу становится равным единице, а на ее другом входе продолжает оставаться равным единице благодаря работе цепочки резистора 38 и емкос ти 39. При двух единичных входах сигнсш на выходе схемы 40 совпаде- ния нулевой. По окончании разряда емкости 39 сигнал на выходе схемы 40 - единица./ Таким образом, при нулевом коде реверсивного счетчика 6 любой продолжительност на выходе датчика 21 имеет нормированный по длительности нулевой сигнал, начало которого совмещено с моментом времени, когда код реверсивного счетчика 6 станови ся нулевым.. При срабатывании датчика 21 нуля (цоз.5, табл.2) на шину плюс вы числителя ,25 и счетный вход триггера 23 поступает нормированный по дл тельности сигнал. Вычислитель 25 по лучает команду плюс, ключ 24 за крывается., Потенциалом же с прямого выхода триггера 23 разрешается работа ключа 27 Равно, -который срабатывае |При коде «д счетчика 22 и наличи jсинхроимпульса ключа 15 распределит ;ля 12. Поскольку ключ 24 закрыт, то на поз. б и 7 табл. 2 при работе да чика It) наезда код счетчика 22 буде изменяться. Очевидно, что после наезда второй оси второй тележки код реверсив ного счетчика б соответствует весу второй .тележки. При заносе этого ко да в вычислитель 25 и последующем срабатывании ключа 15 ключ 27-выдает вычислительную команду Равно и с табло 26 оператор считывает вес вагона. Ключ 27 работает кратковременно по переднему фронту синхроимпульса ключа 15, так как все другие потенциалы в этот момент - разрешаю.щие (код счетчика 22 равен 9, т.е. исходному, на выходе Л триггера 23 также разрешающий потенциал единица). Так как потенциал с выхода ключа 27 триггера 23 возвращается в исходное состояние, то для уверенного, т.е. достаточного по длительности, прохождения команды Равно на выходе триггера 23 включена ем кость 28, которая некоторое время сохраняет потенциал i на входе ключа 27, хотя триггер 23 уже и изменил свое состояние. Далее на поз.9 - 12 следует чередование наездов и выездов. При наездах 8 и 10 код реве1 сивного счетчика б будет передан в регистр клавиатуры вычислителя 25 и в дальнейшем погашен, так как операционных команд (+ или Равно) не поступает . Поз. 12 табл.2 показывает положение при наезде последней (третьей)оси второго вагона 17, так как далее следует подряд три выезда. Очевидно, что код поз. 12, соответствующий весу первой тележки шестиос ного вагона 17, не будет стерт, а будет передан на поз. 16 в операционный регистр вычислителя 25 командой Плюс при срабатывании датчика 21 нуля. Далее следует три наезда (поз.17- 19, табл. 2) и, очевидно, после третьего наезда, т.е. на позиции 19, код реверсивного счетчика б будет соответствовать весу второй тележки шестиосного вагона 17. Как видно из анализа состояний выходов счетчика 22 и триггера 23, после окончания заноса кода (т.е. веса второй тележки второго вагона) срабатывает ключ 27 Равно и на табло 26 индицируется вес второго вагона. Последняя команда Плюс-, возникающая на поз. 23 табл. 2, анулируется командой Сброс, подаваемой автоматически или вручную. Таким образом, достаточно простой блок 16 управления позволяет взвеши-вать любые комбинации вагонов (четы ех-,шести- и восьмиосных) . Составляют табл. 3 для различных комбинаций вагонов и локомотива (тепловоза типа ТГМЗ). Чередование Сочетание выездов {-; вагона и .локомотива 1 2 3 4 5 б 7 8 910 Позиция + 4-- + - + - + -+ 4- 4- - + - 4- - ч- +.+ 4- - О + + ++ + ++ Из табл. 3 видно, что, когда локбМотив (Л) находится в голове состава устройство работает совершенно так же, как описано выше Так, если вслед за локомотивом (первай строка табл. 3) движется четырехосный вагон то на поэ 1, 2,4,6 и 8 5аботает датчик 19 наезда код реверсивного счетчика б заносит ся в регистр клавиатуры вычислителя 25, но гасится ПРИ следующем заносе. Код реверсивного б на . поэ. 10 представляет собой вес первой тележки вагона 17. На поз, 13 срабатывает датчик 21. нуля, переносящий вес первой тележки в операцио ный регистр вычислителя 25, На поз. 15 срабатывает ключ 27 Раёно} и оператор считывает с табло 26 вес четырехосного вагона. Если Локомотив находится в хвосте состава (последняя строка тйбл.З на поз, 3 код реверсивного счетчика 6 представляет вёс первой тележки шестиосного вагона. На паз.7 датчик 21 нуля сигнал Плюс |перенося код поз. 3 в операционныйрегистр вычислителя 25 На поэ, 10 срабатывает ключ 27
Таблица з срабатьгаания датчика 19 наездов (+),датчика 20 и датчика нуля (0) 11 121314 15161718 19 20 21 22 --О ++-- О + - - О4-+ + „ « о + -4- - -Ь- U -+- -+-+ -+ - -О Равно, и оператор считывает вес шестиосного вагонас табло 26, Далее .на поз 12,15 и 17 код реверсивного счетчика б переносится в регистр Клавиатуры (вычислителя 25, но затем- гасится. . Код поз, 19, соответствующий весу двух осей локомотива заносится в регистр клавиатуры вычислителя 25, а на поз« 22 сигналом датчика 21 нуля переносится в его операционный регистр. Этот Код будет погашен в Дсшьнейшем подачей команды Сброс,. Для удобства работы и- исключения субъективных ошибок оператора питание на индикаторные лампы табло 26 подано через высоковольтный ключ 29. Поскольку ключ 29 открывается через триггер 30 индикации сигналом ключа 27 авно, а закрывается сигналом датчика 19 наездов, то оператор видит на табло 26 только окончательный результат (вес всего вагона), Все другие промежуточные результаты вес осей, кес первой тележки и др. не индицируются что исключает субъективные ошибки оператора. Технико-экономическая эффективность Обеспечивается путем.повышения его надежности. , Ul-jZfS6/jrff/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ОМА 3374844, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Обзорная формаций ЦНИИТЭИ приборостроения, м,, 1974V с 21-23, . | |||
