Изобретение относится к весоизмерительной технике .и предназначено для взвешивания железнодорожного подвижного состава во время движения в составе поезда.
Цель изобретения - повышение точности измерения.
На фиг.I показана блочно-кинема- тическая схема устройства; на фиг.2 и 3 - электрические принципиальные схемы блоков устройства; на фиг.4 и 5 - работа устройства в различных технологических ситуациях.
Автоматическое устройство для поосного взвешивания железнодорожных вагонов содержит весовую плат- (1юрму, образованную, например (фиг. двумя грузоприемными блоками 1 с весоизмерительными датчиками 2. Гру- зоприеммые блоки 1 длиной около 1300 мм установлены на железнодорож-:- ном пути так, что колесная пара вагона или локомотива (не показаны) одновременно наезжает и съезжает с ле . вого и правого блоков 1, фиксируе- мых в горизонтальной плоскости ограничителями 3, укрепленными на фундаментных блоках 4.
Весоизмерительные датчики 2 подключены к измерительному входу цифрового автокомпенсатора 5, например типа Ф4233/1 (на фиг.1 обозначены: Вх - измерительный вход, И - шина
, РГ - шина кокоманды измерение манды регистрация, Уст.О - шина установка нуля, вьссоды прибора Ф 4233/1 - Б - баланс, ВС - весы свободны).
Лвтокомпенсатор 5 связан с регистрирующим прибором б, например цифро- печатающей машинкой.
Путевые датчики 7 и 8, установленные на расстоянии около 1950 мм от краев грузонриемного блока 1, подключены к схеме 9 направления, выход которой связан с шиной Уст.О автокомпенсатора 5, а выходы ПД1 и ПД2 (путевой датчик 1 и путевой датчик 2) с входами () и -) реверсивного счетчика-корректора 10 и с входом блока I1 идентификации (на фиг.1 обозначены его выходы: первый выход ТВ - техника въехала, объединенные второй и четвертый выходы Б - вагон, третий выход ВС - весы свободны, пятый выход ТП - телезкка подъехала) .
Выход В блока 11 связан с входами ключа 12 измерения и совместно с выхо
дом К (коррекция) счетчика-корректора 10 - с входом схемы 13 сброса, выход которой АС (автоматический сброс) подключен к схеме 9 направления.
Выход ТВ (тележка въехала) блока 11 подключен к счетному входу Т триггера 14 регистрации, на S-вход которого подсоединен выход К счетчика- корректора 10. Кроме того, выход ТВ и выход ТП подсоединены к входам триггера 15 контроля, выход которого связан с входом записи (V на фиг. 1) счетчика-корректора ю, на информационные входы которого установлено число 2 подачей на вход 2 положительного потенциала, тогда как его другие установочные, входы - заземлены.
На D-вход триггера 16 экстремума подсоединен выход ключа 12 измерения, а на С-вход выход Б (баланс) автокомпенсатора 5.
На фиг.2 показана схема 3 направления, работающая от путевых датчиков 7 и 8, представляющих собой контактно-рычажные системы, срабатывающие при наезде на них гребня колеса вагона или локомотива. Схема 9 .направления содержит триггеры-повторители 17 и 18, схемы 19 и 20 совпадения, триггеры 21 к 22 направления, ключ 23 установки нуля, ключ 24 сброса, коммутатор 25.
Па фиг.З показана электрическая принципиальная схема блока 11 идентификации, содержащего регистр подъезда тележки на триггерах 26, регистр въезда тележки на триггерах 27, триггер 28 идентификации, инверторы 29 и 30
Устройство для поосного взвешивания железнодорожных вагонов работает следующим образом (см.фиг.2).
При подъезде первого колеса состава к весам срабатьшает один из
путевых датчиков 7 или 8 в зависимости от направления движения. Пусть первым срабатывает путевой датчик 7 и триггер-повторитель 17, возбуждающий через схему 19 совпадения триггер 21, блокирутощий сигнал ом со своего идверсного выхода через схему 20 совпадения триггер 22. С ключа 23 установки нуля на вход автокомпенсатора 5 поступает команда Уст.О,
отрабатьшаемая последним. На все вр емя работы устройства до поступения команды АС (автоматический сброс) сигналу путевого датчика 7,
проходящему через верхнюю половину коммутатора 23, присваивается номер один (сигнал ПД1 .фиг. 1 - 3),а сигналу путевого датчика 8, проходящему через нижнюю половину коммутатора 25, номер два (сигнал ГШ2) .
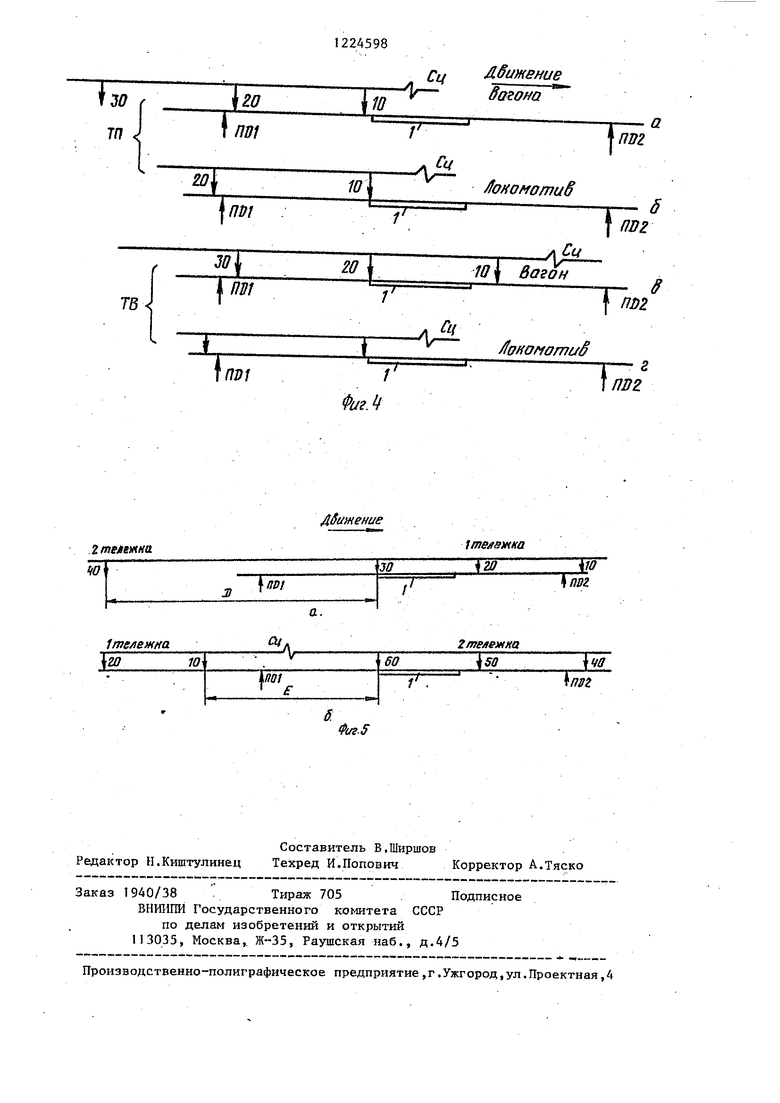
Сигналы путевого датчика 7 (т.е. ГЩ1) подсчитываются регистром подъезда тележки на триггерах 26 (см.фиг,3 погашаемым сигналом автокомпенсатора 5 ВС. Поскольку длина грузоподъемного блока 1 составляет около 1300 мм, межосевое расстояние тележки вагона около 1800 мм, а расстояние от путевого датчика 7 (или В) .до весовой платформы около 1950 мм, то, очевидно, сигнал ТП сформируется только при подъезде вагона и весовой платформе. Это видно из виг.4, показывающей в масштабе 1:50 различные технологические ситуации, связанные с работой блока 11 идентификации (обозначения 10,20,30 - оси трехосной тележки, СЦ сцепка).
Две верхних позиции фиг.4 поясняют работу регистра подъезда при подъезде тележки (позицияа) и локомотива (позиция S).
Из позиции а ясно, что перед наездом первой оси IО те1лежки вагона на грузоприемный блок 1 дважды под подряд сработал путевой датчик ПД1, поскольку между ним и грузоприемным блоком 1 помещается две оси (.10 и 20) тележки вагона.
Из позиции S следует, что при въезде па грузоприемный блок 1 первой оси локомотива команда ТП сформирована не будет, так как датчик. ПД1 не сработает два раза подряд (межосевое расстояние локомотива составляет около 2100 мм).
При появлении сигнала ТП возбуждается триггер 28, формирующий сигнал В, которьй вместе с сигналом с выхода автокомпенсатора 5 ВС, формируемым при наезде каждого колеса состава, поступает через ключ 12 измерения на D-вход триггера 16 экстремума (см.фиг.1). Автокомпенсатор 5 при наезде колеса на грузоприемный блок 1 отрабатывает сигнал весоизмерительных датчиков 2 до состояния компенсации, по достижении которой формируется сигнал Б, поступающий на С-вход триггера 16 и возбуждающий последний. Триггер 16 экстремума формирует для автокомпёнсатора 5 команду И.
5
0
Автокомпенсатор 5 имеет с своем составе измерительный реверсивный счетчик (не показан), работающий в режиме постоянного отслеживания раз- баланса на входе Вх и вьщающий в режиме достиже 1ия компенсации сигнал Б. При достижении кодом реверсивного счетчика некоторого заранее установленного значения (например, 10% 0 шкалы) формируется сигнал ВС. По получении команды И код реверсивного счетчика многократно переносится во встроенное арифметическое устройство, где усредняется.
Команда И поступает в автокоьшенса- тор 5, начиная с первого экстремума дннамнчесйой помехи, что с учетом возможности выбора времени измерения позволяет существенпо уменьшить ошибку измерения, подобрав время измере-. ния paBjibLM целому числу полупериодов помехи (для конкретных условий работы).
Таким образом, при наезде 5 дои оси вагона (сколько бы их не
было) триггер 16 экстремума формирует команды И и в арифметическом устройстве автокомпенсатора 5 нарастающим итогом накаливается результат (вей вагона).I
Регистрация веса каждого вагона происходит следующим образом (см. фиг.З и 4).
При въезде на грузоприемный блок 1 последней оси каждой тележки . (сколько бы их не было) два раза подряд на регистр из триггеров 27 приходит сигнал автокомпенсатора ..5 ВС и формируется сигнал ТВ, подаваемый на счтеный вход триггера 14 регистрации (фиг.I).
Формировавшие сигнала ТВ поясняется позициями 6 и г фиг.4, Из позиции 6 ясно, что при В75езде на грузоприемный блок последпий - в данном слуг , чае третьей - оси 30 последует два сигнала ВС подряд. -В то же время из позиции 2 следует, что при въезде последней оси локомотива сигнат ТВ не сформируется, так как два раза Q подряд сигнал ВС не последует.
При каждом втором по счету сиг нале ТВ триггер 14 выдает автокомпенсатору 5 сигнал РГ, по которому содержимое арифметического уст- ройства передается регистрирующему прибору 6.
Для повьппения надежности работы i устройство определяет середину каж-
0
0
5
дого вагона и вьщает на триггер 14 импульс К для чего используются триггер 15 контроля и счетчик-корректор 10.
Коррекция осуществляется следую- щим образом.
При каждом сигнале ТВ возбулода- ется триггер 15 контроля (см.фиг.1) и счетчик-корректор 10, в который записано число 2, т.е. число осей, которым предстоит наехать на путевой датчик того, как тележка полностью выедет за пределы ве.. сов. На фиг.5 изображены моменты выезда пе1эвой тележки (позиция о ) и второй тележки (позиция б) шести- осного вагона. Как это ясно из по- зицин а, при выезде за пределы путевого датчика ПД2 осей первой тележ- .ки проходит обнуление, счетчика-кор- ректора 10, поскольку расстояние D между внутренними осями 30 и 40 для подавляющего большинства вагонов отечественного парка более 5,4 мм, а расстояние между путевыми датчика- ми ПД1 и ПД2 - около 5,2 м. Таким образом, при проезде весов серединой вагона счетчик-корректор 10, на счетный вход - которого подсоединен датчик 11Д2, обнуляется раньше, чем от оси 40 второй тележки сработает датчик ПД, подключенный к вко- ду + счетчика-корректора 10.
Из рассмотрения позиции б фиг.3 следует, что после формирования сигнала ТВ от последней - шестой - оси 60 и включения в работу счетчика- корректора 10 последний не обнуляет- ся, так как: расстояние Е в районе сцепки Сц между осью 60 я первой осью 10 сле дующего вагона около 3- 3,3 м и датчик ГЩ1 сработает, увеличивая код счетчика-корректора 10, во всяком случае раньше, чем ось 60 выедет за пределы датчика ПД2. Следо вательно, счетчик-корректор 10 при проезде середины каждого вагона формирует импульс коррекции К, возбудающий триггер 14 регистрации, если имела место ошибка, или подтверждаю- щий его возбуждение, если работа происходипа без сбоев,
лЛ ..
Если в составе -будут вагоны с меньшей, чем требуется, для формирования импульса коррекции К длиной Д внутреннего расстояния между осями соседних тележек, то никакого сбоя в работе это ие вызовет, просто на
этих вагонах коррекция произведена не будет.
Схема 13 сброса обеспечивает автоматическую работу всего устройства без участия .оператора. Схема 13 представляет соб.ой элемент И по нулям (например, типа 136ЛЕ6), на входы которой поступают импульс коррекции К и сигнал В блока 11 идентификации.
Сигнал К формируется в середине каждого вагона, но сигнал В в это время единичньй, поэтому сигнал АС не формируется. Сигнал АС генерируется только в конце состава, когда сигнал В также равен нулю.
I...
Схема 13 сброса работает во всех
случаях: при расположении локомотива впереди, сзади, внутри состава, а также при наличии в составе других неконтролируемых объектов с любым расположением осей.
Формула, изобретения
Устройство для поосного взвешивания железнодорожных вагонов, содержащее грузоприемные блоки с весо измери тельными датчиками, подключенными к автокомпенсатору, к выходу которого подключен регистрирующий прибор, путвые датчики, подключенные к схеме на равления, один выход которой соединен с входом Установку нуля автокомпенсатора, а другой выход - с входом блока идентификации, первьй выход которого подключен к счетному входу триггера регистрации, и шину питания, отличающееся тем, что, с целью-повьш1ения точности измерения, в него введены ключ измерения, один вход которого подключен к второму выходу блока идентификации а другой вход ключа измерения и вход автокомпенсатора подключены к третьему выходу блока идентификации, триггер экстремума, к D -входу которого подключен выход ключа измере.ния, к С-входу - выход Баланс автокомпенсатора, вход Измерение которого соединен с выходом триггера экстремума, а вход Регистрация - с выходом триггера регистрации, триггер контроля, S-вход которого и Т-вход триггера регистрации соединены с первым вькодом, а R-вход - с пятым выходом блока идентификации, счетчик- корректор, счетный вход которого подключен к выходу триггера контро7
ля, входы управления - к второму и третьему выходам схемы направления, а установочный вход 2 - к шине питания, и схема сброса, один вход
которой соединен с четвертым выходом j с входом Сброс схемы направления.
8
блока идентификации, S-вход триггера регистрации и другой вход схемы сброса соединены с выходом счетчика-корректора, а выход схемы сброса
|-
kC г
П
nDI
П02
Фиг.2.
1224598
76
njJi
Фиг.
Ctf Лбижение г ffowffa
A
OHOfiomLfe
nsz
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания подвижного состава | 1986 |
|
SU1315822A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| Способ поосного взвешивания подвижных объектов | 1988 |
|
SU1522045A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1983 |
|
SU1078256A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |
| Устройство для поосного взвешивания подвижных объектов | 1989 |
|
SU1702185A1 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Устройство для взвешивания железнодорожного подвижного состава во время движения | 1982 |
|
SU1046621A1 |

Изобретение относится к области весоизмерительной техники и предназначено для взвеш1юания железнодорожного (ЖД) подвижного состава. Цель изобретения - повьппение точное- тн измерения. Весоизмерительные датчики 2 подключены к входу цифрового автокомпенсатора 5. Путевые датчики 7 и 8 подключены к схеме 9 направления. Устройство содержит также реверсивный счетчик - корректор 10, блок 11 идентификации, ключ 12 измерения, схему 13 сброса, триггеры 14, 15 и 16 регистрации, контроля ,.и экстремума. Введение новых элементов и образование новых связей между элементами устройства позволяет повысить точность измерения. Приведена схема блока I1 идентификации и дана работа устройства в различных технологических ситуациях. 5 ил.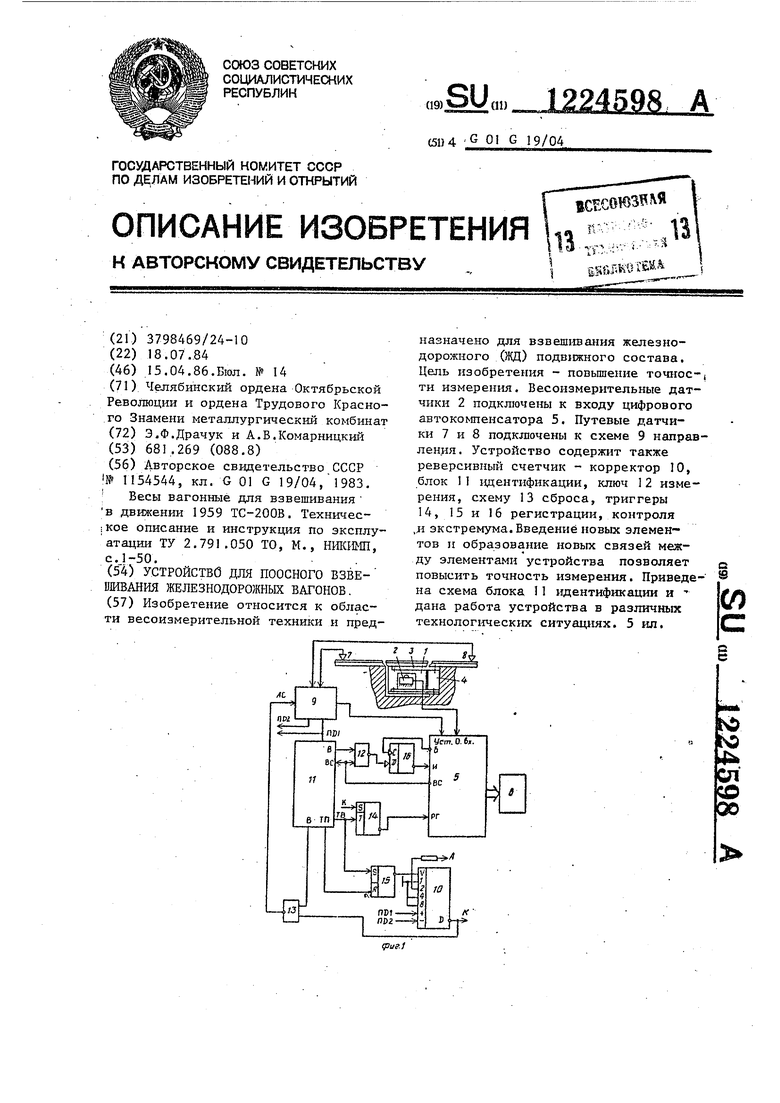
Л имение
5:
Фиг.5
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматический сцепной прибор американского типа | 1925 |
|
SU1959A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
