Изобретение относится к весоизмерительной технике, в частности к способам взвешивания железнодорожных вагонов при их движении через весовую платформу, и может быть использован, например, для взвешивания вагонов с шихтой, слитками и т.п. в металлургических производствах.
Известен способ потележечного взвешивания вагонов на ходу, заключакядийся в том/ что определяют напрацление движения с помощью крайних путевых датчиков, производят при этом установку, нуля автокомпенсатора, определяют момент наезда каждой тележки на весовую платформу путем подсчета числа наезжающих осей двумя путевыми датчиками с выбранным расстоянием между ними, исключают локомотив с помощью схемы наезда, определяют момент выезда каждой тележки с платформы путем подсчета (числа осей с помощью путевых датчикoв установленных по краям платформы, формируют по сигналам наезда и выезда сигнал Измерение, взвешивают тележку с помощью автокомпенсатора, суммируют веса тележек попарно и регистрируют С Недостаток этого способа заключается в необходимости наличия путевых выключателей, которые в условиях металлургического производства (сбросы на пути шихты, сыпучих материалов, выплески чугуна и т.п.) не обеспечивают надежную вьщачу информации.
Наиболее близким к предлагаемому по технической сущности является способ потележечного взвешивания йагонов на ходу, заключающийся в непрерывном измерении нагрузки на весовую платформу с одновременным подсчетом числа находящихся на весовой платформе осей вагона по ступеням изменений нагрузки на весовую платформу и регистрации веса при на ождении на весовой платформе заданного числа осей С2 Недостаток известного способа заключается в том, что он обеспечивает возможность взвешивания только однородных вагонов, например только четырехосных.
Цель изобретения - расширение области применения способа путем создания возможности взвешивания вагонов с различным числом осей и при любой их комбинации в составе поезда
Поставленная цель достигается тем,, что согласно bnocQ6S потележечного взвешивания вагонов на ходу, заключающемуся в непрерывном измерении нагрузки на весовую платформу с одновременным подсчетом числа находящихся на весовой платформе осей . вагона по ступеням изменений нагрузки на весовую платформу
и регистрацию веса при нахождении на весовой платформе задан-.. ного числа осей, при наезде на весовую платформу осей первой тележки вагона запоминают измеренное значение веса, затем по нулевому сигналу измерителя веса в момент нахождения весовой платформы между тележками вагона формируют управляющий сигнал на регистрацию запомненного значения веса как веса первой тележки, а вес второй тележки регистрируют при наезде на весовую платформу такого же числа осей, то и до вьщачи управляющего сигнала при нулевом сигнале измерителя веса, причем длину весовой платформы выбирают меньше базы вагонов, но большей базы локомотива.
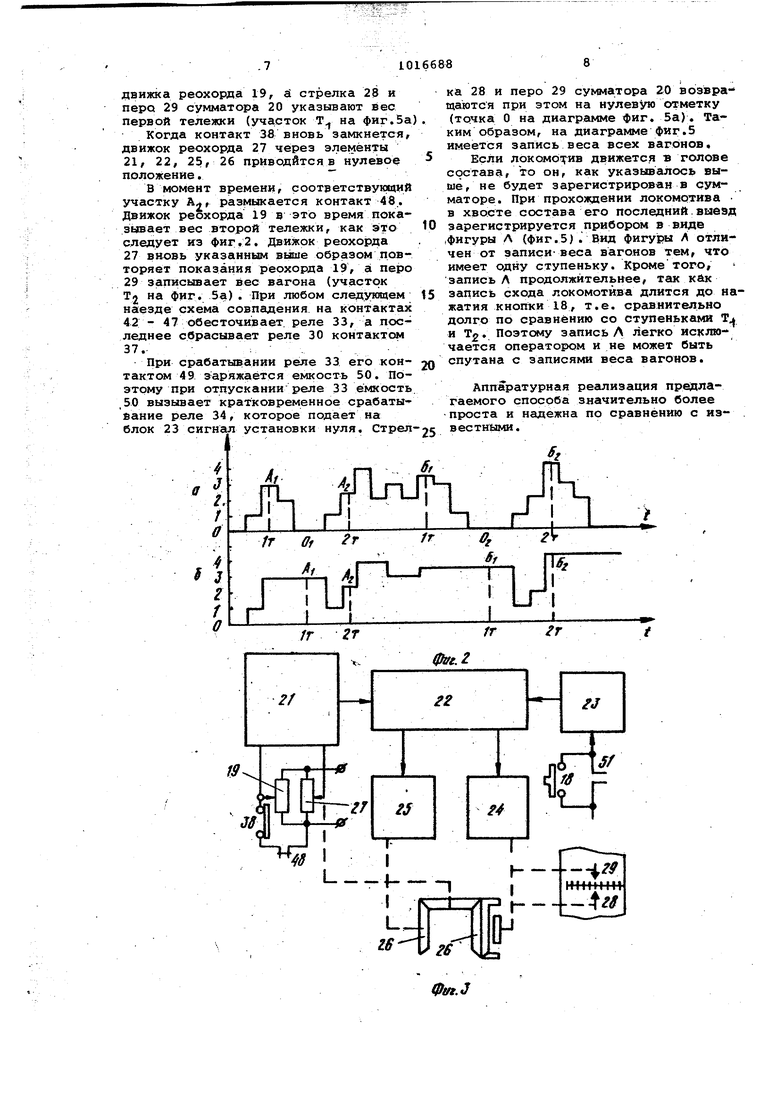
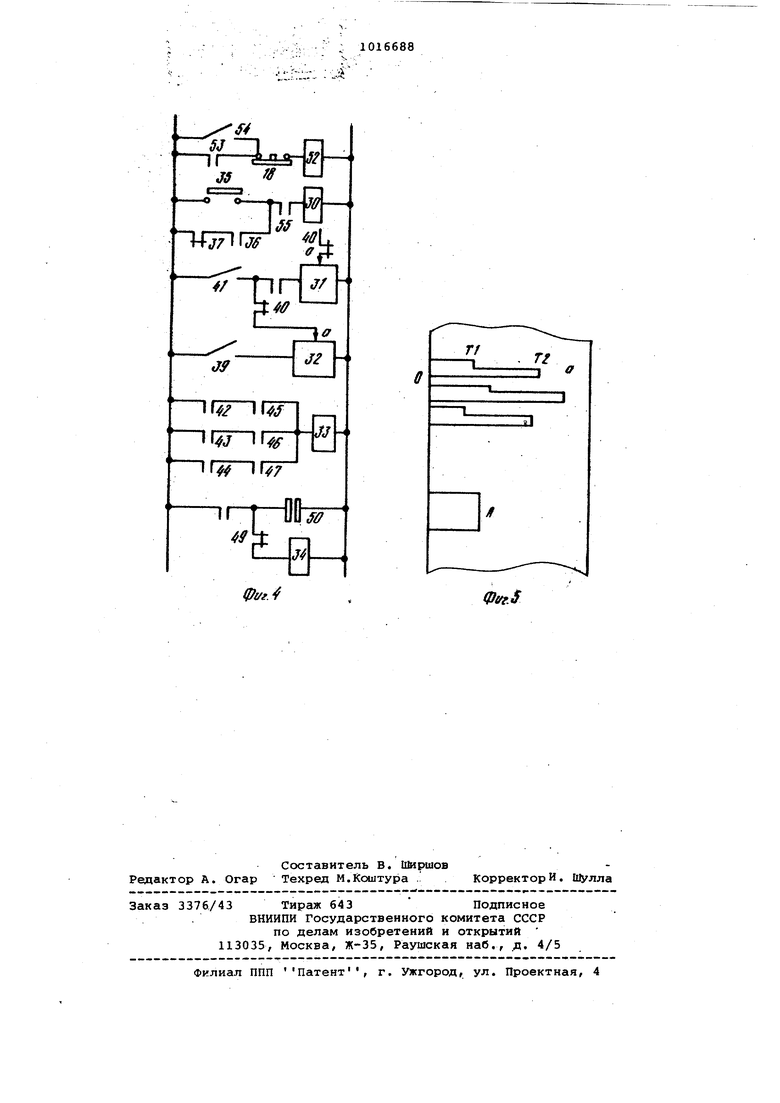
На фиг.1 изображена блок-схема устройства для осуществления предлагаемого способа; на фиг.2 - диаграммы, записи процесса взвешивания, поясняющие работу устройства; на фиг.З - схема сумматора; на фиг.4 схема блока управления; на фиг.-5 результирующая диаграмма сумматора. Рассмотрим порядок наездов и выездов осей вагонов различного типа в различной последовательности на платформу длиной 5,4 м. Длину 5,4 м выбирают потому, что у 95% вагонов база больше 5,4 м, а у локомотивов меньше 5,4 м.
Выбор весовой платформы такой длины, что платформа как бы провалив ется между первой и второй тележками вагона, позволяет потележечно взвешивать вагоны по весьма простому алгоритму. Для этого необходимо вес первой тележк.и регистрировать пр« последнем наезде перед состоянием нуль автокомпенсатора. Это всегда верно, поскольку тележка съезжает с весовой платформы последовательно всеми осями. Следовательно, после последнего наезда перед состоянием нуль и перед первым выездом (перед состоянием нуль) тележка находится на весовой платформе.
Вес второй тележки определяют, сосчитав количество подряд съехавших осей перед состоянием нуль автокомпенсатора, т.е. определив ос ность тележки, через такде е количество наехавших осей после состояния нуль.
Мезкцу соседними вагонами состояния нуль не бывает, так что состояние нуль
эквивалентно определению середины вагона. Это означает, что при каких-либо сбоях при провешивании состава (например, пропущено взвешивание одной тележки) нормальйый алгоритм может быть восстайовлен 6:3тематически. В известных системах такой сбой приводит к тому. что суммируются тележки разных ,ваго .нов. Таким образом, 4-, 6- и 8-осные вагоны в любых сочетаниях могут быт взвешены быстродействующим автокомпенсатором (цифровым или аналоговым по предлагаемому способу. Рассмотрим различные комбинации вагонов и локомотива (например, у тепловоза типа ТГМ-3). Поскольку способ предусматривает взвешивание первой тележки при последнем наезде перед состоянием L нуль, а база локомотива меньше длины весовой платформы, так что состояние нуль при проезде локо мотива не возникает, то при нахожде нии локомотива в голове состава никаких дополнительных взвешиваний не производится, т.е. локомотив автоматически исключается при провеши вании состава . Если локомотив находится в хвост состава, то взвешивание последнего перед ним вагона производится правильно, но полный выезд с весовой платформы самого локомотива воспри нимается как выезд первой тележки вагона. Поскольку окончательным итогом взвешивания является сумма двух тележек j то вес съехавшег9 локомотива воспринятый как выезд первой тележк может быть автоматически исключён. Устройство для- осуществления пре лагаемого способа содержит (фиг.) автокомпенсатор 1 веса с дополнител ным реохордом 2, тензодатчик 3,- на который опирается весовая платформа (не показана), двухпороговую схему 4 и реле 5 и 6 наезда и выезда. Дву порогрвая схема 4 может, например, представлять собой фазочувствительный усилитель, на выходе которого включены реле .5 и 6. Мостовая схема 7., усилитель 8 и двига:тель 9 представляют собой авто крмпенсатор с памятью, при наездах осей повторяющий показания автокомпе.нсатора- 1 веса, а при выездах осе запоминающий предьадущее показание благодаря работе управляклдего :реле 10, контактами которого 11 и 12 коммутируются обмотка управления дв гателя 9 и балластный резистор 13. Реохорд 14 мостовой схемы 7 объе динен с дополнительным реохордом 2 автокомПенсатора 1. Реле 10 включае ся контактом 15, реле 5 наезда блокируется контактом 16, реле 6 выезда - через собственный блок-контакт 17.. Для начальной установки предусмотрена кнопка 18 .Пуск . На валу двигателя 9 соосно с рео хордом 14 находится реохорд 19 сумматора 20. « Сумматор 20 (фиг.З) содержит усилитель 21, фазовый селектор 22, блок 23 установки ,нуля, суммирующий двигатель 24 и дополнительный двигатель 25, через дифференциальный редуктор 26 связанные с реохордомкомпенсатором 27. С валом суммирующего двигателя 24 связаны стрелка 28 и перо 29.. Блок управления сумматором 20 (фиг.4) содержит реле 30 середины вагона, счетчик 31 наездов, счетчик 32выездов,. реле 33 конца вагона и реле 34 установки нуля. Реле 30 середины вагона включается контактом 35 датчика нуля (например, концевым выключателем нуля автокомпенсатора 1 веса), и через свой контакт 36 и контакт ,37 реле 33конца вагона встает на блокировку. Контакт 38 датчика нуля отсоединяет движок реохорда 19 от нуля при внесении в сумматор 20 веса: первой тележки вагона. Счетчик 32 выездов по счетному входу управляется контактом 39 реле 6 выезда, а по шине гашения са через переключающий контакт 40 реле 30 середины вагона контактом 41 реле 5 наезда. Счетчик 31 наездов по шине гашения d. управляется контактом 40 и реле 30. Контакты 42 - 44 счетчика 32 выездов и контакты 45- 47 счетчика 31 наездов образуют схему, совпадения. Контакты 42 и 45 замыкаются при кодах счетчиков 32 и 31, равных двум, контакты 43 и 46 - при кодах, равных трем, и контакты 44 и 47 при кодах, равных четырем (по числу осей в тележках вагонов). Контакт 48 реле 33 конца вагона отсоединяет движок реохорда 19 от нуля при вне- сении в сумматор 20 веса второй тележки нагона.. Переключающий контакт 49 реле 33 служит для заряда емкости 50 и разряда ее на рел0 34 установки нуля при отпускании реле 33. Контакт 51 реле 34 подключен к блрку 23 уатановки нуля, как и за1« 1какхций контакт кнопки 18 Пуск- Раз1 влкающий контакт кнопки 18 Пуск соединен последовательно с катушкой пускового 52,связанной с источником питания через свой контакт 53 и контакт 54 реле 5 наезда. Контакт 55 реле 52 обеспечивает реле 30 середины ваго7 на при пустой пла тформе. Устройство для осуществления способа работает слелуивдим образом. После окончания или перед началом взвешивания вагонов очередного состава оператор кнопкой 18 (фнг.1) включает реле 10,, которое через сйой контакт 17 и контакт 16 реле 6 встает на блокировку. Контакт 11 реле 10 размыкается, и двигатель 9, расто 4ажиБаясь, перемещает движок реохорда 14 на нулевую отметку, так как движок реохорда 2 находится на нулевой отметк (груза на платформе нет), а движок реохорда 14 повторяет положение дви ка .реохорда 2. Движок реохорда 19 сумматора 20, находящийся на одном валу G реохордом 14, также устанавJlивaercя на нулевой отметке, сумматор .20 обнуляется, так как кнопкой 18 Пуск (фиг.З) запускается блок 23 установки нуля. К1эоме того, обесточивается реле 52 благодаря размыканию контакта кнопки 18 Пус {фиг.4). Реле 30 середины вагона также обесточивается, хотя контакт 35 датчика нуля и замкнут при пустой платформе. Таким образом, в исхсэдном состоя нии движки реохордов 2, 14, 19 и27 находятся на нулевых отмет.ках, как и стрелка 28 сумматора 20. При наезде первой оси состава от контакта 54 реле 5 наезда срабатьшает и становится на самоблокиров ку пусковое реле 52, подготавливая своим контактом 55 реле 30 середины вагона к срабатыванию. На фиг.2а изображена диаграмма записи усилий тензодатчика 3, автокомпенсатором 1 при проходе по весовой платформе сцепленных 4-осного и 6-осного вагонов. Из диаграммы видно, что взвешивание первой 4-осного вагона нужно производить на участке А-,, а второй тележки - на участке А„ после наступлени нулевого состояния. Взвешивание первой тележки 6-осного вагона нужно проводить на участке Б, а второй тележки - на участке Б„, О том, что показания автокомпенсатора 1 на участках А и Б соответствуют весам первых тележек, узнают в моменты наступления нулевых состояний 0 и т.е. после того, как показания автоксмлпенсатора 1 уже изменились и равны нулю. Это всегда так, потому что при выбранной длине весовой платформы перед состоянием нуль с платформы съезжает столько осей, сколько их имеется у тележки, так как тележка вся помещается на весовой платфор ме, а расстояния между осями в тележке меньше, чем между ближайшими осями соседних вагонов. Поэтому используют автокомпенсато памяти, работающий сл.едующим образом (фиг.1-и 2) . При каждом срабатывании реле 5 наезда (т.-е. при каждом наезде любой оси тележки) контакт 15 включает реле 10, которое . контактом 11 растормаживает двигател 9, вследствие чего последний отележивает через реохорд 14 и усилитель 8 положение движка реохорда 2 автокомпенсатора 1. Реле 10 с помоцью своегоконтакта 17 встает на самоблокировку через размыкающий контакт 16 реле 6 выезда. При размыкании контакта 16 (т.е. при выезде любой оси) реле 10 обесточивается, а двигатель . 9 затормаживается. Вследствие этого диаграмма записи положения реохорда 14, соответствующая диаграмме на фиг. 2 а, т.е. случаю наезда последовательно соединенных 4-осного и 6-осного вагонов , имеет вид, представленный фиг. 2 б. Автркомпенсатор памяти как бы не чувствует выездов осей, сохраняя показания автокомпенсатора 1 на участках А и В до их регистрации в моменты времени 0 и 02. Рассмотрим работу счетчиков 31 и 32 наездов и выездов. До срабатывания реле 30 середины вагона его контакты 40 замкнуты так, как это показано на фиг.4. При этом счетчик 31отсоединен, обнулен и не считает наезды, а счетчик 32 считает выезды, но сбрасывается в нуль по шине ot при каждом наезде. Как следует из фиг. 2 а, в момент 0 в счетчике 32 имеется код, равный двум, т.е. замкнут контакт 42 в цепи реле 33 конца вагона. I В момент времени 0 срабатывает вследствие замыкания контакта 35 датчика нуля реле 30 середины вагона, его переключающий контакт 40 -изменяет свое состояние, подключив счетчик 31 наездов и отключив счетчик 32выездов, Теперь счетчик 31 считает наезды, В момент .времени А2 код его становится также равным двум, замыкается контакт 45 и срабатывает реле 33 конца вагона. Размыкается его контакт 48, и значение веса второй тележки передается в сумматор 20. Размыкается также контакт 37 реле 33 и реле 30 обесточивается. Следующее срабатывание реле 30 происходит (фиг. 2а) в момент времени 0. Рассмотрим работу сумматора 20. . Реохорд 19 (фиг. 1 и 3) играет роли.; датчика параметра, а реохорд 27 роль компенсатора. Замкнутыми контактами 38 и 48 соответственно датчика нуля и,реле 33конца вагона устанавливается искусственный нуль, и при этом движок реохорда. 19 как бы не передвигается. Реохорд 27 остается на нулевой отметке, и в сумматор 20 ничего не заносится, f Контакт 38 размыкается в момент времени 0. Движок реохорда 19 в ; это время показывает, как это видно из фиг. 26, значение веса первой тележки. Через элементы 21, 22, 24 и 26 движок реохорда 27 приводится в положение, соответствующее положению движка реохорда 19, и стрелка 28 и перо 29 сумматора 20 указывают вес первой тележки (участок Т на фиг.Ба Когда контакт 38 вновь замкнется, движок реохорда 27 через элементы 21, 22, 25 f 26 приводится а нулевое положение. В момент времени, соответствующий участку размыкается контакт 48. Движок реохорда 19 в это время показывает вес второй тележки, как это следует из фиг.2. Движок реохорда 27 вновь указанным выше образом повторяет показания реохорда 19, а перо 29 записывает вес вагона (участок Tj на фиг. 5а). При любом следующем наезде схема совпадения на контактах 42 - 47 обесточивает, реле 33, а последнее сбрасывает реле 30 контактом 37..:. При срабатнв ании реле 33 его контактом 49 заряжается емкость 50. Поэтому при отпускании реле 33 ёмкость ,50 вызывает кратковременное срабатывание реле 34, которое подает на блок 23 сигнёш установки нуля. Стрел ка 28 и перо 29 сумматора 20 возвращаются при этом на нулевую отметку (точка О на диаграмме фиг. 5а). Таким образом, на диаграмме фиг.5 имеется запись веса всех вагонов. Если локомотив движетс.я в голове состава, то он, как указывалось выше, не будет зарегистрирован в сумматоре. При прохождении локомотива в хвосте состава его последний.выезд зарегистрируется прибором в вяде (фигуры Л (фиг.5) . Вид фигу1ры Л отличен от записи-веса вагонов тем, что имеет одну ступеньку. Кроме того, запись Л продолжительнее, так кик запись схода локомотива длится до нажатия кнопки 18, т.е. сравнительно долго по сравнению со ступеньками Т и т. Поэтому запись Л легко исключается оператором и не может быть спутана с записями веса вагонов. Аппа ратурная регшизация предлагаемого способа значительно более проста и надежна по сравнению с известными.
. ;, : 1016688
.- % -:/
. ;-..if 
СПОСОБ ПОТЕЛЕЖЕЧНОТО ВЗВЕШИВАНИЯ ВАГОНОВ НА ХОДУ, заключакяцийся в: непрерывном измере11ии нагрузки-на : весовую платформу с одновременным Подсчетом числа находящихся на в;есовой платформе осей вагона по ступеням изменений нагрузки на весовую платформу и регистрации веса при нахождении на весовой платформе заданного числа осей, отличающийс я тем, что, с целью расширения области его применения путем создания возможности взвешивания вагонов с различным числом осей и при любой их комбинации в составе поезда, при наезде на весовую платформу ;одей первой тележки вагона запоминают измеренное значение веса, затем по нулевому сигналу измерителя в момент нахождения весовой платформы между тележками вагона фо1 мируют управляющий сигнал на регистрацию запомненного значения веса как веса первой тележки, а вес второй тележки регистрируют при наезде на весовую платформу такого же числа осей, .что и до выдачи управлягадего сигнала при нулевом сигнале измерителя веса, причем длину весовой платформы выби,рают меньшей базы вагонов, но боль.шей базы локомотива.. О) -oSx ОЬ 00 00 47м/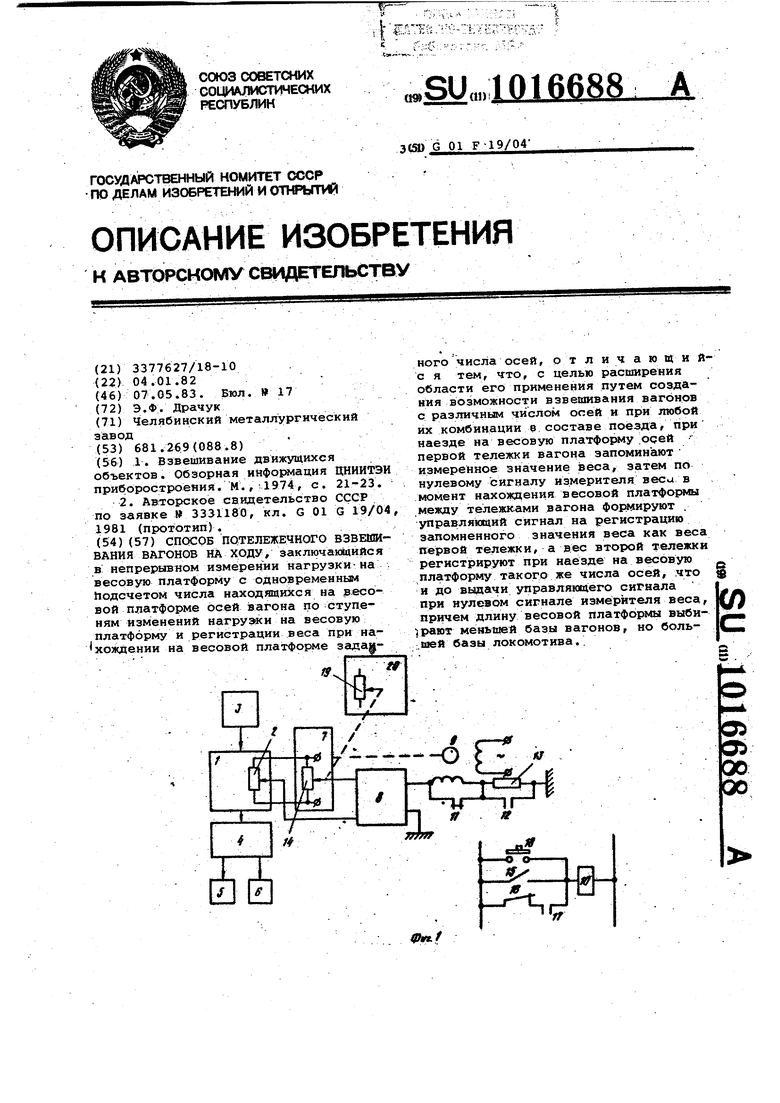
Vl.f
r/
. Tl
(pfffS
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Взвешивание движущихся объектов | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М., l974 , с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке №3331180, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
