1234728
элементами устройства позволяет повы- уменьшения диапазона нагрузок на тен- сить точность устройства за счет
зодатчики 6 и 7. 7 ил.
Изобретеиие относится к весоизмерительной технике и может быть использовано для взвешивания грузов, перевозимых железнодорожным транспортом. .
Цель изобретения - повышение точности за счет уменьшения диапазона нагрузок на весоизмерительные датчики.
На фиг. I изображена функциональ- над схема устройства для взвешивания железнодорожного подвижного состава , на Фиг. 2 - схема установки весовых модулей в железнодорожный путь, на (. 3 - схемы подвижного состава; на фиг. 4 - блок-схема идентификации на фиг, 5 - схема направления движения; а фиг. 6 и 7 -схемы, поясняющие работу предлагаемого устройства
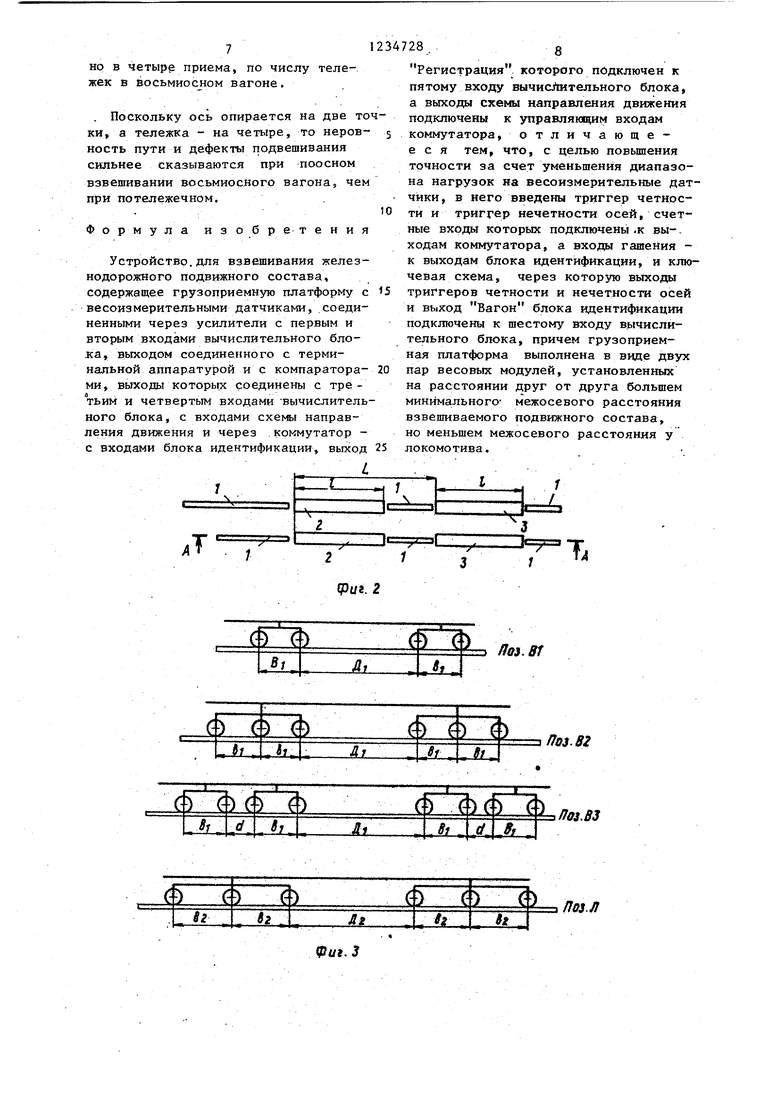
Устройство для взвешивания желез- нодорожного подвижного состава содержит встроенные в железнодорожный путь I весовые модули 2 и 3 (фиг.2), Модули 2 и 3 прикрепляются к фун- даментньм блокам 4 струнами 5 и опи- раются на тензодатчики, соответственно 6 и 7.На фиг. 1 условно изображены два тензодатчика 6 левой пары модулей 2 и. два тензодатчика 7 правой пары модулей 3.
Тензодатчики 6 как и тензодатчики 7 включаются параллельно и соединяются попарно с усилителями 8, выходы S1 и S2 которых связаны с ана- входами вычислительного блока 9, соединенного с терминальной аппаратурой 10, например, дисплеем или устройством цифропечати. К усилителям 8 подключены также компараторы И, выходы которых HI (наездка правую по фиг. I пару модулей 3) и Н2 (наезд на левую по фиг. 1 пару модулей 2)подсоединены к схеме 12 направления движения и совместна с выходами последней - к входам Коммутатора 13.
Выходы коммутатора I3 ПМ (передние модули) и ЗМ (задние модули) подключены на входы блока 14 иден
уменьшения диапазона на
зодатчики 6 и 7. 7 ил.
5
5
0 5 0
0
5
тификации и на счетные входы триггеров 15 и 16 соответственно четности и нечетности осей. Выходы триггеров 15 и 16 связаны с входами клю- че1вой схемы 17, выход которой ИС (инициативный сигнал) подключен на вход вычислительного блока 9. К входу ключевой схемы f 7 подсоединен также выход блока 14 идентификации В (вагон).
Шина гашения триггера 15 четности осей подсоединена к выходу ВТ (выейд тележки), а шина гашения триггера 16 нечетностей осей - к вьпсоду ТВ (тележка выехала) блока 14 идентификации.
Команда ВТ (выезд тележки)соответствует началу выезда тележки, а команда ТВ формируется после окончания выезда.
Объекты, с которыми оперирует предлагаемая система, изображены на фиг. 3.
Позицией Bf обозначают межосевые размеры четырехосного вагона, позицией В2 и ВЗ - конфигурацию ше- стиосного и восьмиосного вагонов, а позицией Л - локомотив. У подавляющего большинства вагонов отечественного магистрального парка расстояние -между блтаайшими осями в тележке мм, а у подавляющего большинства локомотивов расстояние В2 2100 мм.
В соответствии с этим для идентификации вагонов и ЛОКОМОТИВ& расстояние между модулями 2 и 3 (фиг. 2) выбрано мм.
Ллина модуля 2 (3) лимитирована расстоянием между внутренними осями восьмиосного вагона ВЗ и выбирается условия I d для того, чтобы исключить одновременное нагружение модуля 2 (3) более, чем одной осью.
Расстояние Д1 между первой и второй тележками вагонов В1, В2 и ВЗ для большинства объектов - более 5,4 мм, а для большинства локомотивов - от 3,8 до 5,4 м.
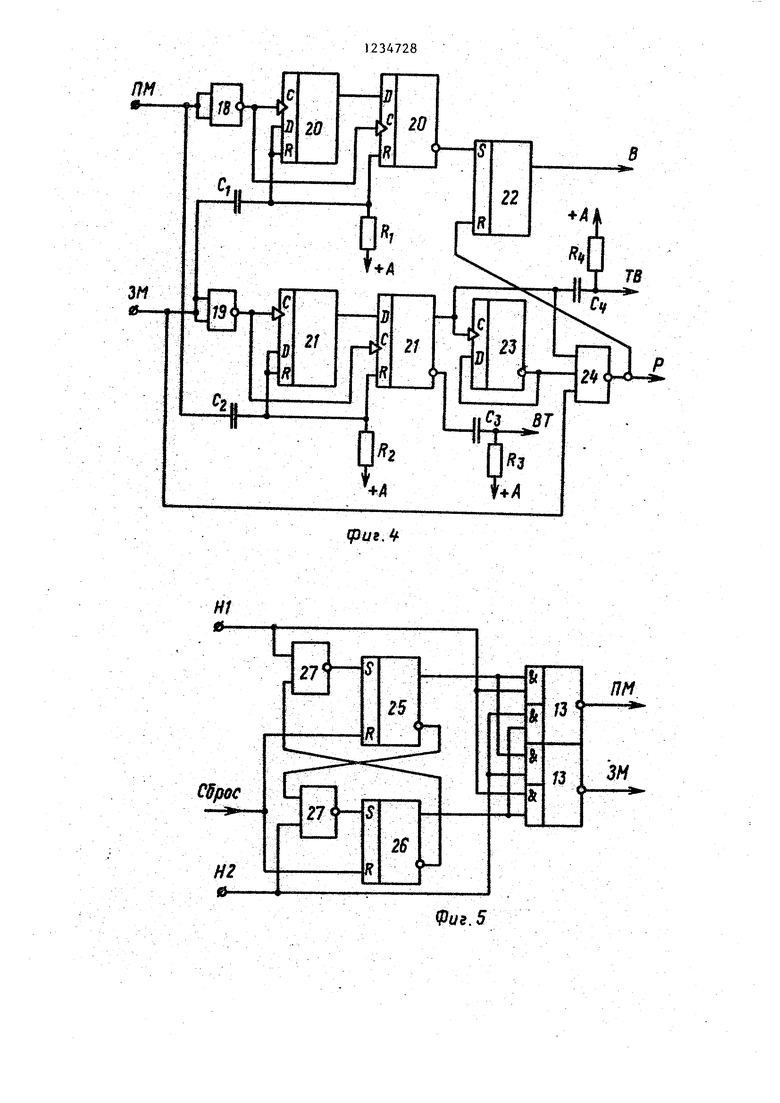
Блок 14 идентификации (фиг, 4), распознающий объекты (фиг. 3), содержит, например, инверторы 18 и 19, регистр подъезда тележки на триггерах 20, регистр выезда тележки на триггерах 21, триггер 22 (вагон), триггер 23 регистрации и ключ 24 гистрации..
Для гашения триггеров 20 и 21 предусмотрены дифференцирующие цепочки , R2G2, а, для формирования сигналов ВТ (выезд тележки) и ТВ (тележка выехала) - дифференцирующие цепочки R3C3, R4C4.
Схема 12 направления движения взаимодействует с коммутатором 13 (фиг. 5) и содержит триггеры 25 и 26 левого и правого направления соответственно, ключи 27.
Устройство для взвешивания железодорожного подвижного состава раотает следующим образом.
Пусть по железнодорожному пути 1 (фиг. 1) к весовым модулям 2 и 3 подъездает состав из вагонов В1, Н2, ВЗ и локомотива Л (фиг. 3), причем безразлично, в каком порядке расставлены вагоны и где находится лоомотив.
При наезде в момент t первого колеса вагона или локомотива на моули 3 нагружаются тенаодатчики 7, срабатывает правый (фиг. 1) компаратор П , формируя сигнал HI, кото25
30
35
рый через верхний ключ 27 (фиг. 5) возбуждает триггер 25 левого направения и коммутатор 13 формирует сигнал ПМ (передние модули). .
С этого момента до подачи вруч- ную или автоматически команды Сброс 0 модули 3 позывают передние, а модули 2 - задние.
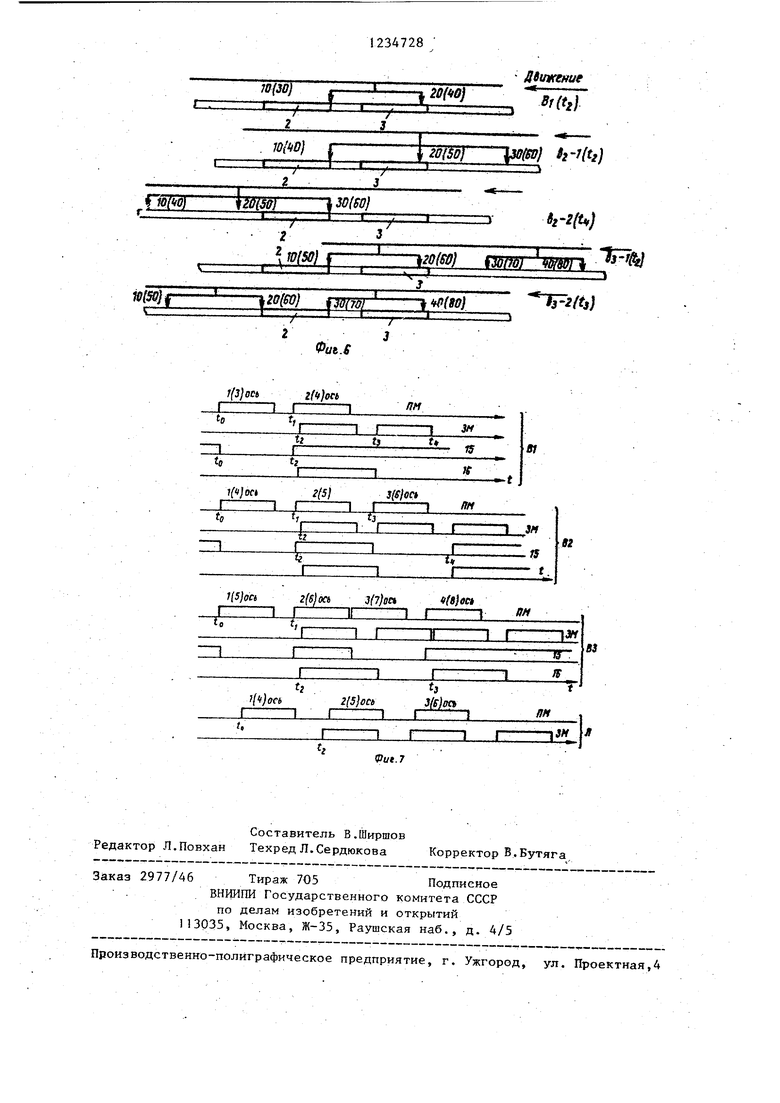
В момент tg (фиг. 7) первым сигналом ПМ коммутатора 13 через инвертор 18 (фиг, 4) возбуждается первый 45 триггер 20 регистра подъезда тележки и погашаются по цепочке R2C2 триггеры 21 регистра выезда тележки. На фиг, 7 изображены моменты наезда осей тележек четырехосного вагона (В1), 50 а также тележек шестиосного и вось- миосного вагонов (В2 и ВЗ) на передние модули 3 (позиция ПМ) и на задние модули 2 (позиция ЗМ), а также моменты срабатывания триггеров 15 и 55 16 соответственно четности и нечетности. Л - наезды на модули 3 и 2 локомотива.
5
О 5
2Q
25
30
35
0
45 50 55
4
В момент t (фиг. 7) возбуждается триггер 15 четности (позиция BI- 15), работающий как счетный от сигнала ПМ.
ЕСЛИ первым в составе движется вагон (В1, В2 или ВЗ), то в момент t;, последует новый наезд на перед- ние модули 3 ранее, чем на задние модули 2 в момент t (фиг. 7).
Вторым сигналом ПМ в момент t возбуждается второй триггер 20 и сигналом с выхода регистра подъезда тележки возбуждается триггер 22, выдающий признак В (вагон),
Кроме того, в момент t, устанавливается в исходное положение триггер 15 четности, выдавая разрешающий сигнал на ключевую схему 17.
В момент t триггеры 20 погашаются, но триггер 22 остается денньгм на все время взвешивания данного вагона, выдавая признак В на ключевую схему 17,
В момент t, происходит наезд первой оси на задние модули 2, возбуждается сигналом ЗМ триггер 16 нечетности (поз. В1-1 6, фиг. 7),а с выхода кгаочевой схемьг 17 поступает инициативный сигнал (ИС) иа вход вычислительного блока 9, по которому последний производит обработку сиг налов S1 и S2 по одному из известных алгоритмов..
Положение первой (третьей) и второй (четвертой)осей тележек четырехосного вагона В1 относительно передних 3 и задних 2 модулей в момент начала инициативного сигнала ИС показано на позиции В1 (фиг. 6).
Таким образом, тележка четырехосного вагона ВI во время взвешивания находится на грузоприемной платформе обеими осями, т,е, система осуществляет потележечное взвешивание и перераспределения нагрузки между осями тележки, дефекты пути и подвешивания -не сказываются на точности измерения;
В момент tj (поз, В1, 4«г, 7) возбуждается по сигналу ЗМ (задние мо- дули) второй из триггеров 21 (первый был возбужден в момент t) регистра выезда тележки и следом возбуждается счетный триггер 23 регистрации. Формируется (фиг. 4) команда ВТ (выезд тележки), подтверждающая состояние сброса триггера 15.
Кроме того, в момент tj устанавивается в исходное состояние триггер 16 нечетности (поз. BI-16, фиг. 7) ак, что инициативный сигнал ИС з рекращается. Однако обработка сигналов S1 и S2 вычислительным блоком 9 прекращается несколько ранее, по окончанию сигналов HI и Н2.
Взвешивание второй тележки (осей 10 3 и 4) четырехосного вагона В1 происходит аналогично взвешиванию первой тележки, но в момент t (поз. . 7) регистр выезда на триггерах 21 срабатывает повторно и на 5 входе ключа 24 регистрации появляется разрешающий сигнал с триггера 23, устанавливаемого в исходное положение, так что после освобождения задних модулей 2 в момент tц 20 устанавливается в исходное состояние триггер 22 (вагон) и на выч ислитель- жтй блок 9 проходит команда Р (региг- страция), по которой результат взвешивания передается, терминальной 25 аппаратуре Ш.
Схема прставленная на фиг. 4,обеспечивав т однократную регистрацию массы каждого вагона, хотя при дви-. женин, например, локомотива импульсы 30 на входе ключа 24 появляются после съезда каждой его оси с задних модулей 2.
Взвеншвание .шестиосного вагона В2 (поз. В2-, В2-2, фиг. 6 и поз. 35 В2, г. 7) происходит иначе.
Взвешивание двух первьк осей каждой тележки шестиосного вагона В2 происходит точно так же, как и взвешивание тележки четырехосного вагона 40 В1 в соответствии с поз. В2-} на фиг. 6, .показывающей начало взвешивания.
Инициативный сигнал на обработку сигналов SI и S2, соответствующих 45 взвешиванию первых двух осей, продолжается с момента t, до момента tj (поз. В2, фиг. 7).
В момент -t третья ось тележки въезжает на задние модули 2 (момент tf за(ксиррван поз. В2-2, фиг. 6).
Фop Iиpyeтcя сигнал ВТ (выезд тележки), устанавливающий в исходное Состояние триггер 15 четности (поз. B2-I5:, фиг. 7.). От Сигнала ЗМ (зад- 55 нйе модули) возбуждается триггер 16 нечетности. Поскольку признак В (ва- Гон) также формируется в момент t ,
то на всех трек входах ключевой схе|Мы 17 имеются разревтающие (единич- 1ные) сигналы, так что на вычислительный блок 9 поступает инициативный сигнал (ИС), который прекращается только при наезде первого колеса следующей тележки на передние модули 3
По инициативному сигналу вычислительный блок 9 производит обработку только сигнала S2 (поскольку заняты только задние модули 2) до окончания сигнала Н2.
Таким образом, взвешивание шестиосного вагона В2 производится в два приема: сначала (поз. В2-1, фиг. 6) две первые оси взвешиваются совместно (потележечный принцип), а затем третья ОСЬ; каждой тележки взвешивается отдельно (поз. В2-2).
Каждая тележка восьмиосного вагона ВЗ взвешивается в два приема: вначале две первые оси, начиная с момента t (поз. ВЗ-1, фиг. 6 и ВЗ-16, фиг. 7), а затем две последующие с момента t, (поз. ВЗ-2, фиг. 6 и ВЗ-16, фиг. 7).
Локомотив или другой объект с межосевыми расстояниями более 1950 мм проходит через передние и задние модули 3 и 2, не вызьшая инициативного сигнала, так как влслед за срабатыванием в момент to (фиг. 7) первого триггера 20 регистра подъезда (фиг. 4) в момент t,j приходит гасящий импульс ЗМ и признак В (вагон) не образуется ни в момент t, ни в дальнейшем, вследствие чего ключевая схема 17 не формирует инициативного сигнала ИС (фиг. 7). Никакие технические средства для исключения локомотива в системе не используются .
Таким образом, предлагаемая система осуществляет потележечное взвешивание любых четырехосных вагонов.
При взвешивании шестиосных вагонов система осуществляет смешанное потележечНо-поосноё взвешивание, однако потележечно взвешиваются четыре оси, а поосно - две, что уменьшает вероятность ошибок, свойственных поосному взвешиванию.
Каждая тележка восьмиосного вагона состоит из двух двуосных тележек, связанных соединительной балкой. Таким образом, восьмиоскый вагон взвешивается системой потележечно.
но в четыре приема, по числу тележек в восьмиосном вагоне.
Поскольку ось опирается на две токи, а тележка - на четыре, то неров- ность пути и дефекты подвешивания сильнее сказываются при поосном взвешивании восьмиосного вагона, чем при потележечном.
Формула изобретения
Устройство, для взвешивания железнодорожного подвижного состава, содержащее грузоприемную платформу с весоизмерительными датчиками, .соединенными через усилители с первым и вторым входами вычислительного блока, выходом соединенного с терминальной аппаратурой и с компараторами, выходы которых соединены с третьим и четвертым входами -вычислительного блока, с входами cxet-bi направления движения и через .коммутатор - с входами блока идентификации, выход
L
фиг. 2
0ui. 3
5
to
5 25
234728,8
Регистрация которого подключен к пятому входу вычислительного блока, а выходы схемы направления движения подключены к управляющим входам коммутатора, отличающееся тем, что, с целью повьшения точности за счет уменьшения диапазона нагрузок на весоизмерительные датчики, в него введены триггер четности и триггер нечетности осей, счетные входы которых подключены .к вы-, ходам коммутатора, а входы гашения - к выходам блока идентификации, и ключевая схема, через которую выхода триггеров четности и не четноС га осей и выход Вагон блока идентификации подключены к шестому входу вычислительного блока, причем грузоприем- ная платформа выполнена в виде двух пар весовых модулей, установленных на расстоянии друг от друга большем минимального- межосевого расстояния взвешиваемого подвижного состава, но меньшем межосевого расстояния у локомотива.
20
Доз. ВТ
Лоз.вг
А f
ТВ
Сч
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2390735C1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Способ поколесного взвешивания подвижных объектов | 1986 |
|
SU1372194A1 |
| Устройство для поколесного взвешивания объектов | 1986 |
|
SU1408234A1 |
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2002 |
|
RU2239799C2 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2507486C1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |

tf3ue,
ПП
Ws.S
7 7/Jfly
.4
- Т - /
. ю1чо}
t zofSDl l gjiKy/
т
гздг
гвт
30(fO)
гf.
JD{SOnk2Q(S0J Шт Ш№П
I , , ; I , г , 7 Ч -J. . . ;. . 3
4
ioiSO) w /gg/ h 2ft3)
23
ffut.f
1(3) осьl{t)oet
JL
to
1
tt
ta
1(1 j act
г(5)
t.
Составитель В.Ширшов Редактор Л.Повхан Техред Л.Сердюкова Корректор Б.Бутяга,
Заказ 2977/46 Тираж 705Подписное
. ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
гфо)
Дбилеение Br(t,l
9i-2(t)
I
/7W
Г
3
f
15
81
«
3{ф
L
ЛС
зн й
и 1м I
да«. 7
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
