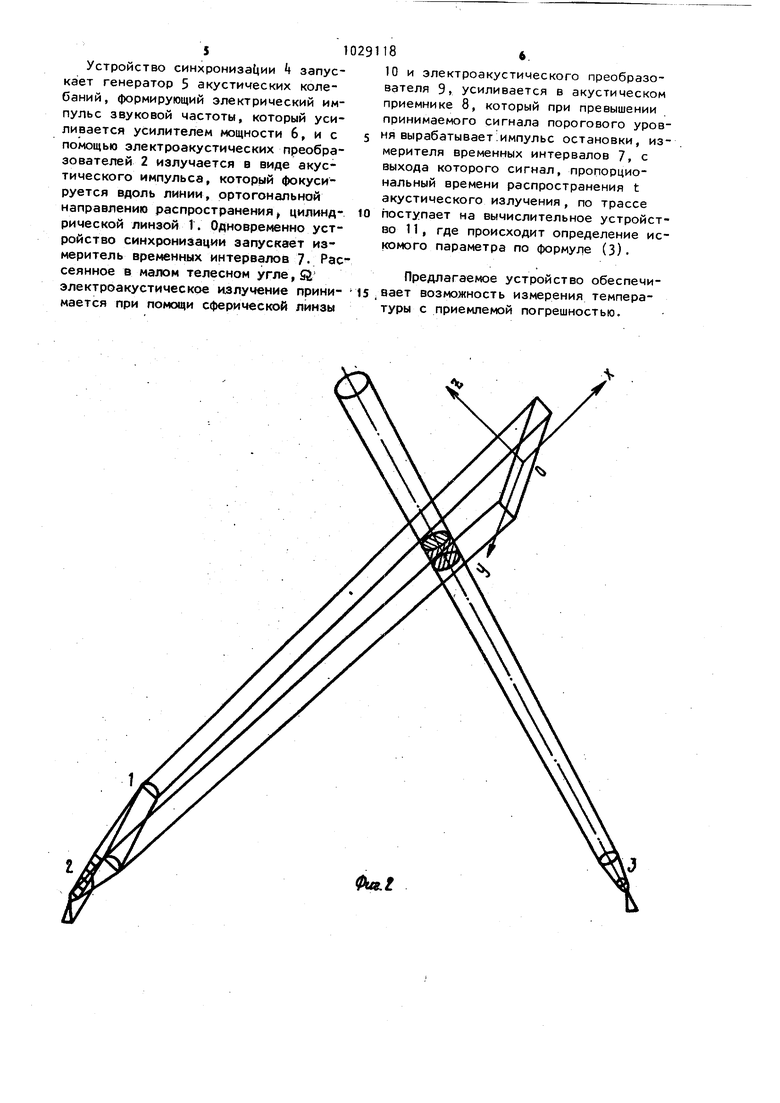
« Изобретение относится к измерительной технике в метеорологии. Известен способ определения температуры атмосферы путем посылки на заданную высоту лазерного импульса, создающего пробой в воздухе, приема возникшего акустического импульса и определения искомой температуры по интервалу времени между посылкой ла зерного и приемом акустического импульса 0. В известном способе предполагают, что акустическая энергия возникает в месте пробоя одновременно с посылкой лазерного импульс. Это влияет на точность определения искомого параметра . Наиболее близким к предлагаемому по технической сущности и достигаекому результату является способ определения температуры атмосферы путем посылки в исследуемую область атмосферы акустического импульса, приема рассеянного акустического излучения и определения искомой температуры по времени распространения акустического излучения по трассеf2j Однако данным способом невозможно измерить температуру атмосферы с приемлемой точностью из.-за малого пространственного разрешения. Целью изобретения является Повышение точности определения температуры за счет уменьшения угловой расходимости передающей и приемной анПоставленная цель достигается тем что согласно способу определения тем пературы атмосферы путем посылки в исследуемую область атмосферы акусти ческого импульса, приема рассеянного акустического излучения и определени искомой температуры по времени распространения акустического излучения по трассе, посылаемый акустический импульс фокусируют вдоль прямой ли НИИ, ортогональной направлению посыл ки , а принимают излучение в телесном угле .5lc где Ти - заданная угловая расходимость сфокусированного посланного акустического излуче ния в плоскости, ортогональной линии фокусировки. На фиг. 1 приведена геометрия бис татической зондирующей системы с углами наклона фц и фр передающей и приемной антенн, угловой полушириной диаграмм направленности и УрИ высотой расположения рассеивающего 18 . .2 объема (пространственное разрешение ее ограничено размером объема рассеяния , заштрихован); на фиг. 2 - схема зондирования атмосферы; на фиг. 3 блок-схема устройства, реализующего предложенный способ. Из геометрии фиг. 1 следует R R 4- Rpf дR дЯу, (R2H-RW/2-()/2 (1) Скорость С распрюстранения звука в атмосфере связана с температурой извесТной зависимостью С 20.05VT,(2) где Т - абсолютная температура, К. Поэтому, зная время прохождения t звуком известного расстояния R, можно определить абсолютную температуру Т из соотношения т С R ° 20,05 ,0025t Как следует из (З), относительная среднеквадратичная погрешность измерения температуры; обусловленная погрешностью определения длины трассы распространения, имеет вид Mf Для определения температуры с приемлемой погрешностью требуется с высокой точностью определять длину трассы распространения. С- учетом малости углов IM и Ур можно записать (&R) (RHrJ%(Rprpr Тогда, используя (), „а пГпАСРрГр) т- ,) или учитывая, что R « ( Rp H/sin } jj(7) проводят упрощение g .Чр -г-рв111фц в1ИЯф +51ИЧр В предлагаемом способе угловая расходимость передающей и приемной ан- тенн уменьшается путем фокусировки посылаемэго излучения вдоль прямой, ортогональной направлению излучения и приеме рассеянного излучения в малом телесном угле 14 Ввиду того, что погрешность (fj измерения тe в1epaтypы аддитивно зависит от углов пол зренияЗ) и передатчика и приемника предположим, что (9) 31 Тогда (8) имеет вид сГ: (10) Телесный угол приемника fl. (11) . (Гт ItSVTT (12) откуда следует, что для обеспечения допустимой погрешности измерения тем пературы должно выполняться соотношение V . (13) Телесный угол приема излученияfij должен быть выбран в диапазоне сха тс-аг, , (1) где у,- угловая расходимость сфокус рованного посланного излучения в плоскости, ортогональной плоскости фокусировки. в результате фбкусировки посылаемого излучения вдоль прямой, ортогональной направлению излучения, сов падающего с осью X, например ОУ, фор мируется веерообразная диаграмма направленности с различной угловой шириной в плоскостях XOZ и ХОУ, причем , теперь антенну приемника выбрать такой, что для нее , т.е. сформировать остронаправленную диаграмму, можно уменьшить Тэбъем рассеяния, заштрихованный на этой фигуре, и таким образом существенно увеличить пространственное разрешение бистатимеской зондирующей системы.V Посылаемое излучение фокусируется вдоль прямой линии, ортогональной направлению распространения с помощью цилиндрической акустической лин зы, в фокальной плоскости которой помещены линейно расположенные элект роакустические преобразователи. Цилиндрическая линза, помещаемая перед антенной передатчика, может быть выполнена в виде объема, заполненно; го угле кислым газом, ограниченного .тонкой коллодиерой пленкой, натянутой на металлический каркас. Вместес тем, если сферическую линзу установить и на .передатчик, го такую бис татичёскую систему трудно сориентировать. Крокю того, ветровой снос звукового луча и атмосферная рефракция , приводящая к смещению сфокусированного излучения из поля зрения антенны приемника, сильно влияет на работу такой системы. Фокусировка же посылаемого излучения вдоль прямой позволяет устранить указанный недостаток, облегячает ориентировку, не 84 уменьшая пространственного разрешения. Выбор остронаправленной антенны приемника обусловлен тем, что уровень окружающих шумов для приемной, сисTeNttJ акустического локатора минимален вблизи зенита и максимален при малых углах места, так как он в ос- / новном обусловлен деятельностью человека. При выборе остронаправленной диаграммы приемника .увеличивается отношение сигнал/шум на входе приемной системы, что позволяет более надежно регистрирювать время прихода сигнала по превышению на приемнике порогового уровня. Максимальный положительный эффект достигается в том случае, когда линия фокусирювки ортбгональна плоскости расположения приемника и передатчика. Работа способа осуществляется с помощью устройства, которое включает цилиндрическую акустическую линзу 1, формирующую веерную диаграмму направленности излучателя, систему 2 линейно расположенных электроакустических преобразователей, помещенных, в фокальной плоскости линзы (в качестве которых могут быть использованы серийно выпускаемые громкоговорители 10 ГД-35), устройство t синхронизации, сигнал которого управляет работой задающего генератора 5 акустических колебаний, подключенного через усилитель мощности 6 к системе электроакустических преобразователей 2, .и измерителя временных интервалов 7 (в качестве которого может быть использован частотомер ФбО) на второй вход которого поступает сигнал с акустического приемника В, содержащего усилитель низкой частоты с пороговым устройством (в качестве которого может быть использован компаратор напряжений на базе микросхеьш 521 САЗ), подключениогрпк электроакустическому преобразователю 9 приемной акустической антенны (в качестве которого может быть использован серийно выпускаемый микрофон МД-66), помещенному в фоку-. се сферической линзы 10. Сигнал с выхода измерителя временных интервалов 7, пропорциональный разности времени посылки и приема сигнала, поступает на вычислительное устройство 11(которое может быть выполнено на базе ЭВМ Электроника НЦ-ОЗ), где по формуле (3) определяется искомый паpai eTp.
5
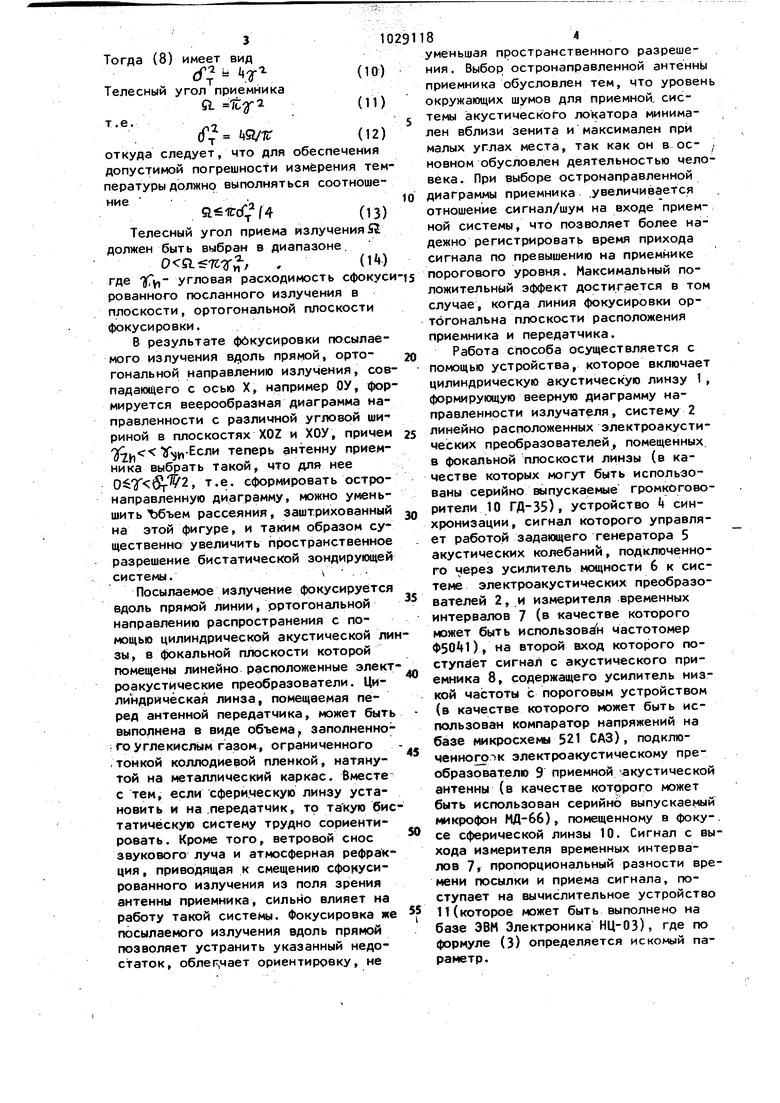
Устройство синхронизации k запускает генератор 5 акустических колебаний, формирующий электрический импульс звуковой частоты, который усиливается усилителем мощности 6, и с помощью электроакустических преобразователей 2 излучается в виде акустического импульса, который фокусируется вдоль линии, ортогональной направлению распространения р цилиндрической линзой 1. Одновременно устройство синхронизации запускает измеритель временных интервалов 7- Рассеянное в малом телесном угле,ffi электроакустическое кзлучение принимается при помощи сферической линзы
186.
10 и электроакустического преобразователя 9, усиливается в акустическом приемнике 8, который при превышении принимаемого сигнала порогового уровня вырабатывает.импульс остановки, измерителя временных интервалов 7, с выхода которого сигнал, пропорциональный времени распространения t акустического излучения, по трассе поступает на вычислительное устройство 11, где происходит определение искомого параметра по формуле (3).
Предлагаемое устройство обеспечи вает возможность измерения температуры с приемлемой погрешностью.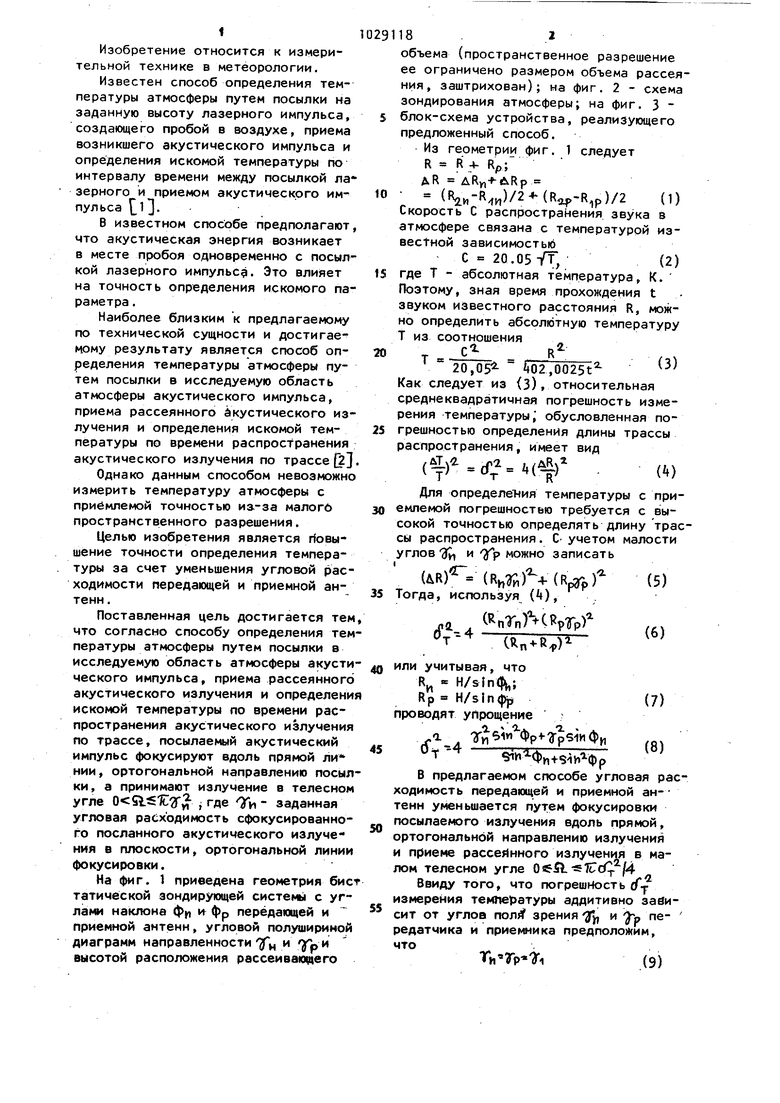
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения внешнего масштаба турбулентности в атмосфере | 1981 |
|
SU1135318A1 |
| Способ бистатического акустического зондирования атмосферы | 1982 |
|
SU1088513A1 |
| Способ измерения скорости ветра | 1982 |
|
SU1101017A1 |
| Способ оптико-акустического зондирования атмосферы | 1980 |
|
SU1088512A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОБЪЕМНОГО РАССЕЯНИЯ ЗВУКА В ОКЕАНИЧЕСКОЙ СРЕДЕ | 1992 |
|
RU2012070C1 |
| Способ определения параметров атмосферы | 1982 |
|
SU1289236A1 |
| Акустический локатор | 1981 |
|
SU991345A1 |
| Способ определения прозрачности атмосферы | 1980 |
|
SU1000984A1 |
| Способ радиоакустического зондирования атмосферы | 1980 |
|
SU883837A1 |
| Оптическое приемно-передающее устройство | 1982 |
|
SU1112907A1 |

.З
