(5) СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЗРАЧНОСТИ АТМОСФЕРЫ
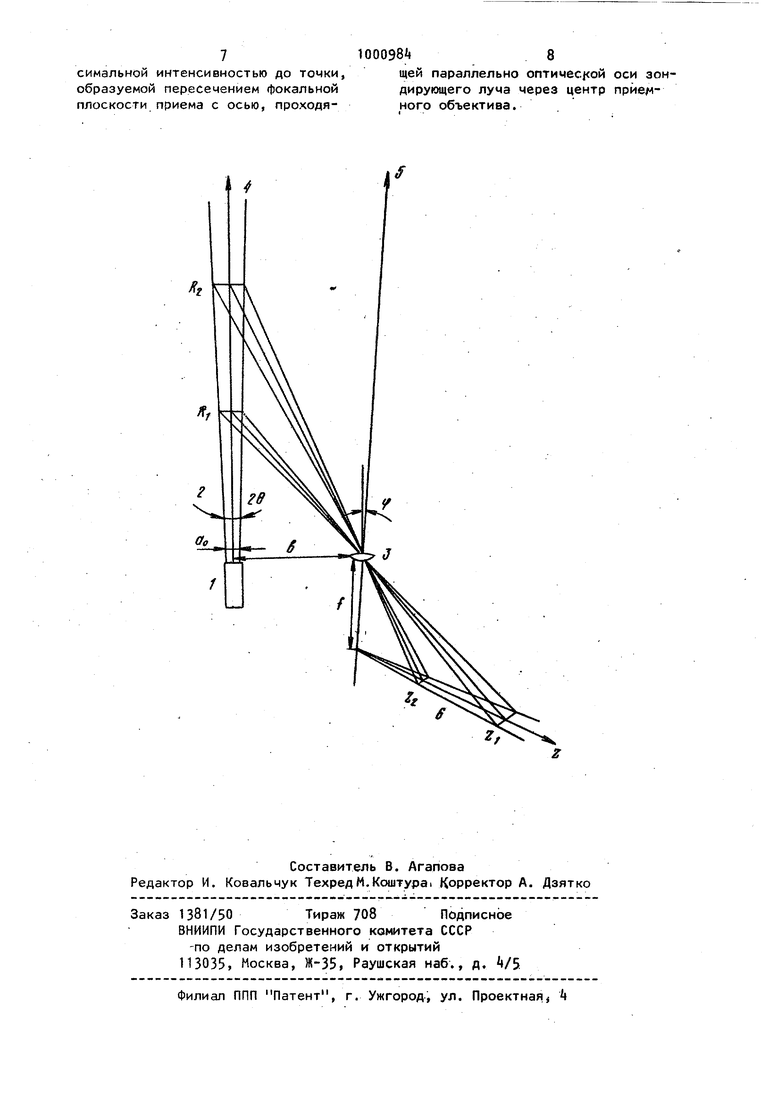
Изобретение относится к анализу состояния атмосферы оптическими мет дами и может быть использовано для дистанционного определения прозрачности атмосферы, информация о которой нужна аэропортовым службам, в м теорологии, для контроля загрязненности атмосферы и для прогноза рабо локационных оптических систем и систем оптической связи. Известен способ определения проз рачности атмосферы путем посылки в атмосферу в нужном направлении опти ческого излучения и приема рассеянного воздухом или объектом в сторону приемника излучения с последующей регистрацией полностью .поступившего на приемник излуМения. Прозрачность атмосферы из формул . , Р(«)А -|f5180°(R)T(R) (1) R для случая рассеяния излучения слоя-, ми воздуха и PiR A T eoVCR) (2) R для случая отражения излучения от объекта , где P(R) мощность принимаемого сигнала; мощность начального излучения;расстояние; А,Ап,- аппаратурные константы; (нГ- коэффициент рассеяния излучения воздухом в направ лении приемника; у 180 - коэффициент отражения излучения объектом в направлении приемника. Однако для однозначного определения прозрачности атмосферы по формулам (1 ) и (2) требуется знание параметров А, р. 180° или Ag, :j- 180°. определения аппаратурных констант А и А2 необходимо проведение спациальных калибровочных измерений , а для , нахождения величин (ж и р ддоявляется вынужденным исполь зование приблизительных предположеНИИ о рассеивающих свойствах или проведение их измерений другим) независимыми способами. Указанные недостатки ведут к увеличению погрешности определения прозрачности атмосферы. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является способ определения прозрачности атмосферы путем посылки в атмосферу оптического излучения, приема отраженного обратно излучения и суждения о прозрачности атмосферы по положению максимума принятого сигнала, причем посылают линейно поляр изованный световой пучок, из рассеянного в обратном направлении выделяют деполяризованную компоненту, деполяризованную ком поненту усиливают пропорционально квадрату текущего времени. Операция выделения деполяризованной компоненты вносит в измерения по грешность, кроме того, используется только часть сигнала, операция усиления принимаемого сигнала пропорционально квадрату текущего времени также вносит дополнительные погрешности. Цель изобретения - повышение точности определения прозрачности атмосферы. Поставленная цель достигается тем что согласно способу определения про зрачности атмосферы путем посыпки в атмосферу оптическогоизлучения, при ема отраженного обратно излучения и суждения о прозрачности атмосферы по положению максимума принятого сигнала, посылают непрерывное излу,j, чение, измеряют распределение интенсивности принимаемого излучения в плоскости изображения освещенного рассейвателя и определяют расстояние от точки с максимальной интенсивностью до точки, образуемой пересечением фокальной плоскости приема с осью, проходящей параллельно оптической оси зондирующего луча через центр приемного объектива. На чертеже приведена схема, пояс няющая суть способа. Передатчиком 1 в атмосферу посылается коллимиованный луч 2 с.начальным диаметром и расходимостью 28. Рассеянное атосферой излучение падает на приемый объектив 3 и фокусируется им в лоскости изображения, проходящей перпендикулярно плоскости чертежа по си Z. Оптические оси передатчика и приемника 5 на чертеже расходятся под углом Ч, они также могут быть параллельными или сходиться. Участок трассы R R2,освещенный зондирующим лучом 2, отобразится в плоскости изображения участком Z , а в целом зондируемая лучом 2 трасса отобразится сегментом 6 в плоскости изображения, причем оптической оси Ц будет соответствовать ось Z, которая будет являться осью сим1 етрии сегмента 6. Освещенность площадки Е в зоне сегмента 6 будет определяться формулой( ЛЪ ((e) мощность начальногоизлучегде РО ния;f5,,(R)коэффициент рассеяния излуче ния воздухом в направлеьЫи приемника; T(R)- прозрачность атмосферы; площадь и фокусное расстояние приемного объектива;. коэффициент пропускания приемно-передающей систем; - расстояние между оптическими осями приемника и передатчика (т.е. база лидара). выполнении условий d,7 2Rtg0 PgS|bt(R)T(R)R 4Jri), т.е. освещенностьпрямо пропорциональна произведению fbtf(R)T2(R)R. Данное обстоятельство позволяет находить коэффициент экстинкции на сравнительно однородных трассах pi|(R) сг const, поскольку из условия (dE/dR)0 умеем пространственная координата соответствует координате точки макс мальной освещенности Ifnoj Связь между координатами R и Z определяется поперечным и угловым , увеличением приемной системы и записываетср как 2:.-|-У(Ъ4-Й51П) (1) R Отсюда . 1))-f4sJn 4 zL«-f f . Rmax Таким образом, измеряя распределение интенсивности принимаемого сфокусированного излучения в плоскости изображения освещенного рассеивателя по максимальному сигналу находят координату . по которой оп ределяют коэффициент зкстинкции d, т.е, поозрачность атмосферы Т(Р) :t6 Ci-, Рассмотрим возможности реализации способа. Условия {k выполнимы, когда используются лидары с большим диаметром выходящего луча и его малой расходимостью или для малых расстояний R. Реальными для лидаров могут быть взяты 1м, 2в . Задаваясь, например порогом 2Rtge 1 имеем R i 1 км. Отсюда следует, что рабочая, просматриваемая лидаром зона составляет радиус примерно 1 км, а.самлидар, согласно (6), позво ляет определять коэффициенты экстинк -ции ,5 , т.е. работать в заму ненной атмосфере. Оценим отношение сигнала к шуму для рассматриваемого лидара. Зададим следующие типичные для лидара и атмосферы параметры: ot 0,5 ,|5х, стер.- , м, ,7, ди метр приемного телескопа , м. |Пусть в лидаре используется лазер с длиной волны Л 9,5 мкм и мощностью ,0 5 Т работающий в непрерывном режиме. Для Л 0,5 мкм является вполне достижимой пороговая мощность фотоприемников Ю ЗвтГц/, Олределим полосу пропускания регистратора йУ 100 Гц. Тогда, если сиг нал регистрируется с площадки 5д{зададим диаметр регистрирующей диафрагмы А мм), мощность светового сигнала запишется, как (R) E(R) $д MtJO (6) А приведенная к входу приемной системы пороговая мсицность фпор ° ределяется, как ) Тогда отношение сигнала к шуму редставится в виде KR) пор Р„ор Подставляя значения приведенных выше параметров в формулу (И ), получим P(R)lnop ,310 r-R«T2. Для значений , 100, 200, 500 и 1000 м отношение сигнала К шуму составит 13, 117, 213, 39 и iiye соответственно. Из приведенных расчетов видно что мощность полезного сигнала значительно превышает мощность шума. Операция измерения интенсивности принимаемого излучения в плоскости изображения освещенного рассеивателя может выполняться несколькими способами, например, сканированием фотоприемника с малой приемной апертурбй сканированием малой диафраг.мы, через которую излучение проходит на неподвижный фотоприемник, размещением в плоскости изображения матрицы диафрагм и регистрацией с них сигналов соответствующими фотоприемниками. Таким образом, показана методическая и аппаратурная реализуемость способа . Предлагаемый способ позволяет упростить методику измерений коэффициента экстинции (т.е. прозрачности атмосфере)) и повысить точность его определения. Формула изобретения Способ определения прозрачности атмосферы путем посылки в атмосферу оптического излучения, приема . отраженного обратно излучения и суж дения о прозрачности атмосферы по положению максимума принятого сигнала,отличающийся тем, что, с целью повышения точности, посылают непрерывное излучение, измеряют распределение интенсивности принимаемого излучения в плоскости изображения освещенного рассеивателя и определяют расстояние от точки с мак7
симальной интенсивностью до точки, образуемой пересечением фокальной плоскости приема с осью, проходя100098 8
щей параллельно оптичес1 ой оси зондирующего луча через центр прйе ного объектива.
