В основном авт. св. Л lOOOU. описана машина для укладки бутылок в 1Ш1,пки с применением подающего и отгрузочного конвейеров, нрпспособлении для захватывани.я бутылок, передвижного i5 «ертикальном направлении стола для подачи ящиков и подпружиненных приспособлений для смягчения удара бутылок при укладке их в Я1п;ики.
Ярисиособленне ддл na.jiaTi iBaiiJi)i группы бутылок вы1шлн.е11о в виде нери1)дич:ески перед шж1гой в горизонтальном направлении кареткп, снабженной пластинчатыми групповыми оажимамп, сб.чокироваипыми ц движением конвейеро.
Предлагаемая машина .является дальнейшим усовершенствованием машипг, по авт. св. М 100092.
Особенность машины заключается и том, что приспособление для захватывания групп бутылок монтировано на сиареиных звеньях цепи дополнительного конвейера, движение которого синхроникировано е дви.ж.еиием конвейеров, подающих бутылки в ящики. Для расстановки бутылок па иодающем конвейере применена система звездочек с расстоянием между их центрами, соответствуюнугм расстояниям ме;1г.ду пентрами гнезд ящика,i
С целью получения большей производительности, предлагаемая машина может быть видоизменена- тем,; что она выиолпяется с двумя каретками, с дву.мя захва-.
та«н и с двумя 11арал.11ельио расиоложен)ымп иода1оп;и.а1 бутылки конвейерами. Движения кареток п конвейеров синхронизированы между собой и с движением передвижного в вертикальном направлении стола л ля подачи ящика тюд укладку бутылок.
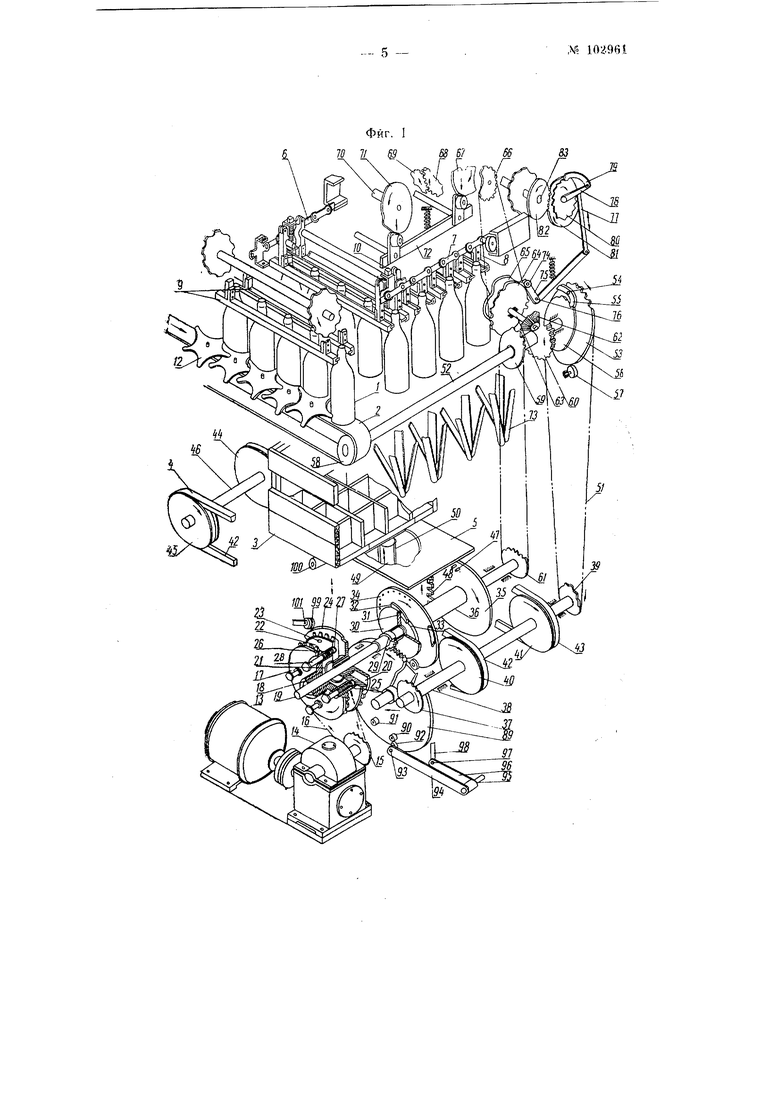
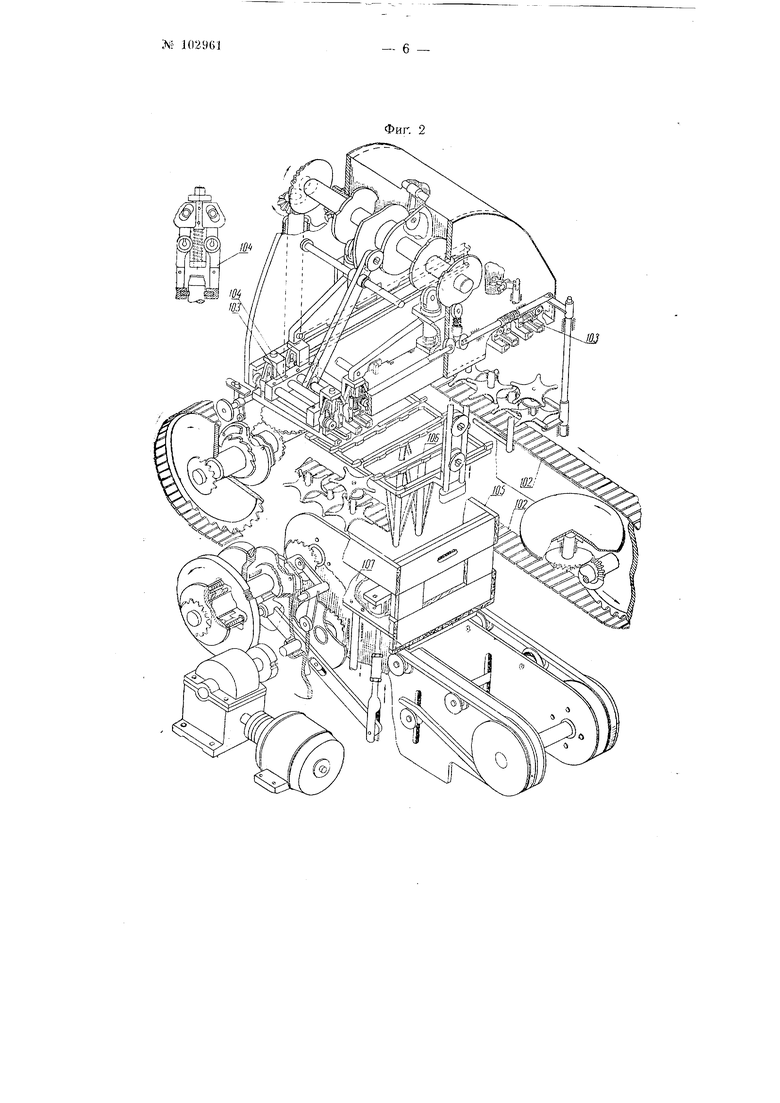
На фиг. 1 изображена кииематическа.я схема машппы, на фиг. 2 - кинематическая схема видоизмененной машины, на фиг. 3 - схема нриспособлениц для захватывания группы бутылок.
Машина имеет подающий бутылки (1) конвейер (2), подающий и oтгpyжaюи ий ящики (3) конвейер (4) п иередвпжной i; вертикальном паправлепп стол (о), поднимающий ян1пкп к дополпительному KOHBeitepy (6), соверщающему перподиче|кие движения с последу101цимп периодами покоя, сипхронизпровапиые с. движением копвейеров (2) и (4).
На спаренных звеньях (7) цени дополнительного конвейера (G) монтпровапо приспособление (8) для захватывания груни бутылок, вьпюлнеиное в виде снаренных рычагов (9), шарпиряо связанных со штокам (10), на котором насажена пружина (11), отклоняющая верхние плечи рычагов (9).
Для расстаповкп бутылок па подающем: конвейере (2) применена спстема располол;еппых пад лентой этого конвейера звездочек (12). Расстояние между цептрами звездочек соответствует расстоянию между ijeHTpaMn гнезд ящика.
Л1лизол маишыы осуществляется от электродвигателя (13) через редукто; U4), злеадочка (15) которого цепью (16) лередаст jipaiueHiic звездочке (17). В стуипцу звездочки (17) запрессована скользящая втулка (18) главного вала (19). H;i последнем yicpeiLUCH храповой диск (20). на стушще которого иосалана скользящая втулка (21). зат1рессо1 ;:нная в звездочку (22).
На звездочке (22) укреилеяа ось (23), 1;оторая илеет иодпружиненную собачку (24), входящую в зацепление с зубом храпового диска (20). Звездочки (17) и (22) яв.Я1отся шариковой фрикционной муфToii снсплеиия. Во втулках (25), жестко укреиленпых в взездочке (17), расположены пружины (2G) и шарики (27), третья часть корпуса которых расположена в лунках звездочки (22). Сила взаимного сценленин звездочек регулируется болтами (28).
На главном валу (19) иа шпонке заj;,peiLie ia иилиндрическая шестерня (29), жестко связанная с диском (30). на оси (31) которого укреилена собачка (32). Она периодически, один раз за четыре оборота диска (30), входит в зацепление с зубом храиового диска (33), связанного с цевочными дисками (34) и (35), объединенными скользящей ступицей (36) главного вала (19).
Звездочка (22) с помощью и,епной передачи вращает звездочку (37). укрепленную иа валу (38), иа котором имеются звездочка (39) и шкивы (40) и (41) клиноременной иередачп. соединенные ремнями (42) и (43) со шкивами (44) и (45), укренленными на оси (46).
Клиноременная передача является конвейером (4) подачи ящиков для укладки в иих бутылок и транспортировки их после укладки. Скорость движеиия конвейера 0,25 м/сев.
Цевки (47) цевочных дисков (34) и (35) входят в зацепление с рейкой (48), взаимодействующей со столом (5) подъема ящиков (3). Шток. (49) стола (5) со};ершает возвратно-поступательное двил;еиие в пенодвпжной направляющей (50).
Звездочка (39) с помощью ценной ие едачн (.51) передает вращение укрепленной на валу (52) звездочке (53), на которой закреплена на оси (54) подпружиненная собачка (55), периодически лходянигя в зацепление с храновым диском (56). Собачка (55) периодически выходит из зацепления с диском (56) в тот момент, когда ее хвостовичок находит ня РО.ТГНК (57).
Вывод собачки (55) из зацепления необходим для периодической остановки конвейера (2) в момент сдвига бутылок с ленты гсоивейера для того, чтобы расставленные с определенным иитерзалом с помощью системы звездочек (12) бутылки не заиосились двилсущейся ленто конвейера, что может нарушить интерва.ч между ними, необходимый для иравнльной Центровки бутылок по гнездам ящика. Для привода конвейера (2) на конце вала (52) жестко поса.лсен ведущнй шкив (58). На валу (52) посажена. скользяи|,ая з ездочка (59), жестко связанная с конической шестерней (60). Привод звездочки (59) осуществлен с помощью цепной передачи от звездочки (61) вала (19). Коническая шестерня (60) через коническую шестерню (62) передает вращение валу (63), на конце которого лсестко носа;кены звездочки (64) и кулачок (65). Звездочка (()4) через цепную передачу вращает звездочку (66), сидящую на валу, на котором жестко закреилен клмачо (67) и цилиндрическая шестерня (68), входящая в зацепление с шестерней (69), носажениой на вал (70), на конец которого посалген кулачок (71).
При работе машины кулачки (71) и (67) через ролики передают давлеиие подирулсиненной планке (72), которая в определенный цикл работы машины нажимает на штоки (10) рычагов (9) нриснособления (8) и открывает их. При этом бутыяки под действие силы тяжести опускаются в гнезда ящика. Центровка бутылок по гнездам ящика и смягчение удара бутылок при укладке их в ящики осуществляется подпружиненным ггриспособлением (73).
Кулачок (65) через ролик (74) периодически передает давление нодпружиненному рычагу (75) и поворачивает его вокруг ненодвижной оси (76). При этом 1иарнирно обязанная с концом рычага (75) тяга (77) поворачивает на, неквтм рый угол рычаг (78), а нодпружиненнан собачка (79), входя в зацепление с зубом храпового диска (80), поворачивает на некоторый угол связанную с диском (8(0 н(естерню (81). Последняя входит в зацеп ленне с шестерней (82), укрепленной ifi валу (83), который является ириводоч дополнительного конвейера (6).
Храповый механизм и кинематика ма1НИНЫ рассчитаны таким образом, что двилсеиие дополнительного конвейера (6) осуществляется три раза, с подачей на 86 мм. и четвертый раз на 129 мм., HII Iчем двилсение происходит в течение 1 cei;., а состояние покоя продолжается 2,75 сек. В момент начала выстоя дополнительного конвейера (6) кулачок, (84) через ролик передает давление рычагу (85), который поворачивается вокруг неподвил:иой оси (86), а ролик (87), расположенный на другом конце рычага, нажимает гаток (10) рычагов .(9) ирисиособления
(8). iiiLviiAiuneioca 11ад конвейером (2). При этом лруяшна (11), связанная (с штоком (10), раскрывает спаренные рычаги (9).
При входе пяти бутылок в eiiapeuin, рычага (9) (что контролируется т ходно; звездочкой 12) в конце периода поко; до110.и1Г|Телм иго конвейера (() ролик (87) рычага (Sii) отклоняется вверх, и под действием иру/ки;;ы (11) рычаг;1 (9) зазшмают горлышки нятк бут,1лок 1од венчик. Одновременно нанравляющая нланка-ограиичителг, (88) утаилизается, и бутылки нри двии;ении донолнителького KOHueiiepa (6) сдвигаютс на одни шаг. Прнвод кулачка (84) осуществ.тяется цепной передачей с вала (70).
Ман1ина работает так.
В момент начала иокоя нервен иар.ы рычагов (0) нрисиссобления (8) для аахвата груни буты.лот;,. разилокпровывается входная звездочка (12). Закоиомсрпоств )азблокировки этой звездочкн синхронно с работой машииы обесиечивается тем, что иа шестерне (89), нриводимой в двн/кенне от шестернн (29) с. иередаточным отношением 1 : 4, на осях (90) в опреде.ченной закономерности укренлены четыре ролика (91) таким образом, что в момент иачала покоя ириспособления (8) ролик (91) через ролик (92) передает давление сидянгдшу иа оси (9:-i) рычагу (9-1) и отклоняет этот рыча:- isoicpyr оси (95). При этом жестко связанный с внм. рычаг (96), соединенный шарниром (97) с тягой (98). также отклоняется вниз н тяга (98) от ;лоняет рычаг, фиксирующи лолокенш входной звездочкн (12).
Если в спаренные рычаги присиособ.юния (8) не В01НЛО пять буты.:1ок, то системой рычагов блокировки ролик (99) отклоняется вниз j выводит из заценления собачку (24); при этом выключается главный вал (19) машины. Последний выключается также в случае отсутствия ящика над столом укладки; при этом ролнк (100) иод действием пружины через систему рычагов отклоняет ролик (101), которвтй нажимает на- хвостовичов собачки (24) н пыводит ее из зацеилепия с диском (20).
При входе в рычаги (9) няти бутылок они раснределяются на интервалв с помошыо пяти раснределительных звездочек; горлышки этнх бутылок слспмаются приспособлением (8) под действием пружины (11). В этот момент конвейер (2) подачи бутылок выключается и бутылки сдвигаются с иего на один шаг к месту укладки.
При сдвиге четвертой группы бутылок, т. е. при наличии над местом укладки комплекта из 20 бутылок, и наличии ящика над столом (5) ящик поднимается
1:а 340 м.м. и ири иодъеме центрируете; иеподвн, наиравля ОН1;е)1 (.50). lIepiiT,ic 240 мм. поднимается только ящик; ио его гнездам центрируется приспособление (73) с наи1)ав.1Я10Н1И.1Н тпЛ.ииамц. ищик иодиимаетея (на 100 мм.) вместе с щтснособлением 173) Т при достшкеиии BppxHeii точки его иодъе5 а плаика (72) иод де и:тв 1ем кулачков (71) и (7) наламае jra иггокн (10) рычагиг, (9) нри(лтособлепня (8) для 3;i: iiiiTa бутылок. Ири этом нружкна (II) с;кнм;;ется и нрпг.нособ.тен1г; (8) раскрывается. Код действием си.м,1. тя;кест Г бутылки но иаиравляюнцтм иру:1;инкам онус|;а1отся и гнез.ьч ян№к-а.
В дальнейшем ин.ик онускаепм и мтлоднтся конвсиерод.
Видоизмененная маипша (((.Иг. 2) нмеет два 1арал.гельно расположенных подаюHUIX бутылки конвейера (102). Над ни.ми coBcpiuaioT движенне две каретки (103), каждая из которых сиабжена двумя захватами (104) для груиц бутылок (ио 5 iHTyi;). Во ремя работы манптв бутылкн ooTO ;;iMH иодаготся в нервые захватв обеих кареток; при этом захваты раскрыты и находятся над нодатотцкми KOHiieiicpaMU.
При ))ХОде пяти оут,1лок в ка;кд дй захват захватв закрываются. горлышки бутылок, и каретки сдвигаются к центру машииы на один шаг, равный 86 мм. Ири этом вторые захваты обеих кареток ра.сиолагаются над нодающими KOHBeiiepaMH, захваты раскрываются, и блокировочное устрой:ство пропускает по пятв бутылок, после чего захватв закрываются, и каретки перемещаются на второй шаг к центру згашины. Б центре мпшниы расиололсеннвте в захватах бутылки образуют накет из двадцати бутылок с, центрами, соответствуюншми центрам гнезд ящика (105).
В этом пололсении бутылки располагаются 1гад рамкой (10G), цeитpпpyюи eй и обеспечивающей поиаданпе бутылок и гнезда ящика, а рам1;а находится кад ето.дом (107) ио.дъсма ящика (ири отсутствин яи(ика над местом укладки буТВ1ЛОК машииа выключается). Б момент, когда ящик находится в верхнем положении, захваты обеих; кареток раскрываются и бутылки под действием силы тяжести опускаются в гнезда ящика. Падение бутылок амортпзируется прулшнами центрирующей рамки. Для уменьшения высоты падения бутылок центрирующая рамка имеет вертикальное пepeмeн eииe, осуществляемое самим ящиком в момеит его нодъема.
После укладки бутылок каретки с захватами наиравляются в нротивоиоложны
стороны - принилают псходнис пиложгяпр, я рнпота машппы ггпвтпряетс.я.
II ) с д м е т л , о о р с т с н и я
1. .Маигииа дли укладки i; ящики UO авт. ел. Л1 100092, отлпч а JOIII, а я с я тем, что арисиособлени для захватывания групп бутылок, монтировано на спаренных звеньях ценгг д; лоляител.ного конионора, движение, которого синхронизировано с движением конвейеров, нодающих бутылки н ящики, а, Д.1Я расстановки бутылок на подающем конвейере применена система звездочек г. расстоянием мезкду их iienTpa.MH, соответствующим расстоянию ие.ясду центрамк гнезд ящийа.
2. Видоизменение- машины но и. 1, о т л к ч а 10 1ц е е с я тем, что, с целью иилучения большей производительности, мантина имеет две каретки с захватами .(л.н груш бутылок и два иараллельно растюлогктлшых подающих бутылки к-оивейера. с синхронизированным движением кареток и конвейеров между собою и с иередви;к 1ьгм л вертикальном направлении столом д.:1я подачи ящика под укладку бутылок.
Приоритет по п. 1 предмета изобретения - 4 фсвряпя 19.55 г., по п. 2 - 2.5 мяя 1955 г.
83


| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для укладки бутылок в ящики | 1954 |
|
SU100092A1 |
| Машина для укладки бутылок в ящики | 1951 |
|
SU96302A1 |
| Устройство для контроля бутылок с жидкостью | 1952 |
|
SU100675A1 |
| Автомат для бракеража бутылок с вином | 1953 |
|
SU101393A1 |
| Машина для очистки ящиков от мусора | 1954 |
|
SU100625A1 |
| Автомат для группирования и установки бутылок в стандартные ящики с перегородками | 1957 |
|
SU112199A1 |
| Устройство для укладки бутылок в ящики | 1982 |
|
SU1098869A1 |
| Прибор для бракеража бутылок с вином | 1951 |
|
SU98247A1 |
| Устройство для распределения подаваемых одним транспортером штучных грузов | 1955 |
|
SU102573A1 |
| Машина для укупорки бутылок | 1950 |
|
SU91657A1 |