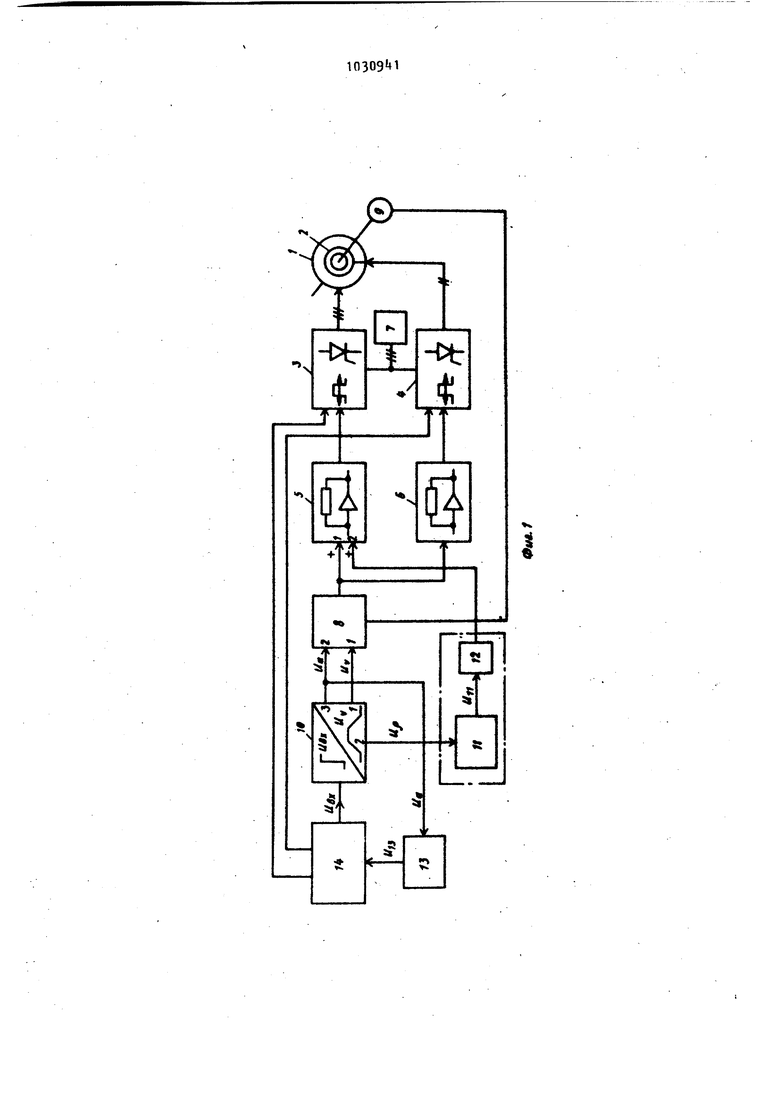
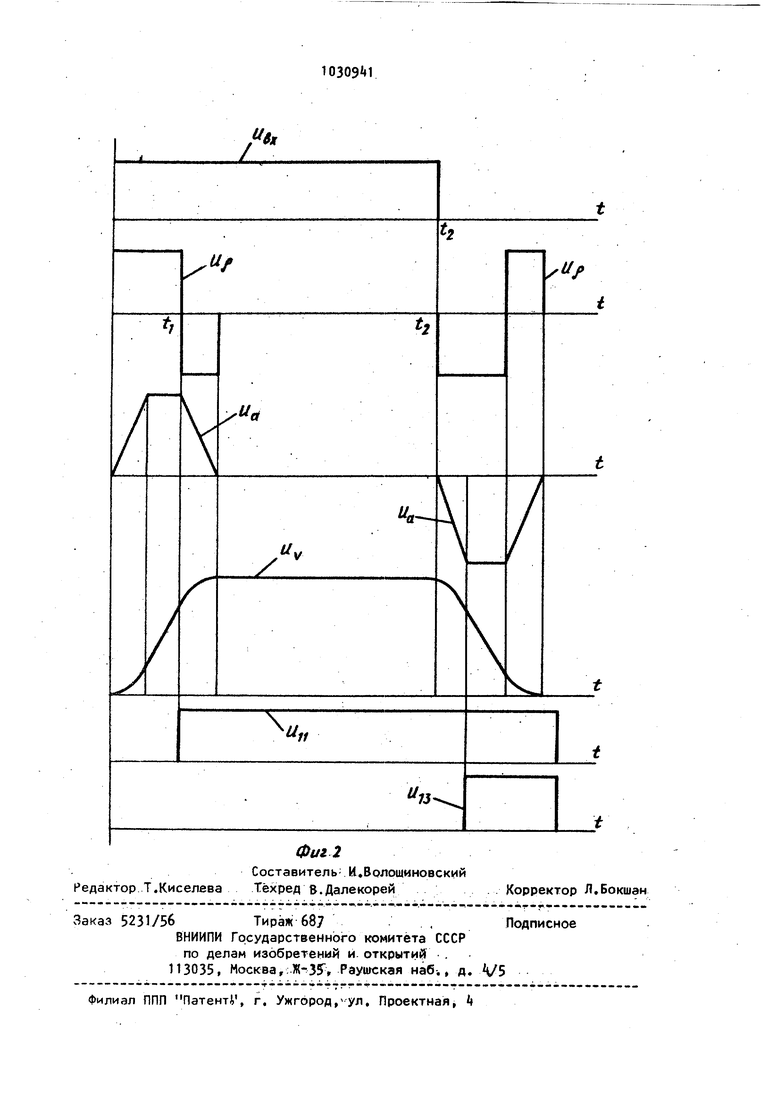
Изобретение относится к электроiтехнике и может быть использовано в электроприводах с асинхронными ((двухобмоточными электродвигателями с тиристорными регуляторами напряжения и управляемыми выпрямителями, например, для подъёмно-транспортных машин, преимущественно лифтов. Известно устройство для управления электродвигателем с реверсивным тиристориым преобразователем, управ емым от системы автоматического регулирования, выполненной по принципу последовательной коррекции 1 . Однако данный электропривод обладает повышенными массо-габаритными показателями и не экономичен. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления асинхронным эле тродвигателем с короткозамкнутым ро тором и двумя независимыми статорными обмотками с различным числом . полюсов , содержащее датчик скорости установленный на валу электродвигателя , управляемый преобразователь выход которого подключен к статорно обмотке с меньшим числом полюсов , управляемый выпрямитель, выход которого подключен к статорной обмот 1ке с большим числом полюсов, первый И ВТО0ОЙ блоки регулирования, выход которых соединеиы соответственно с управляющими входами управляемого преобразователя и управляемого выпрямителя, а входы - с выходом блок сравнения, информационный вход кото рого соединен с выходом датчика ско рости , первый задающий вход блока сравнения соединен с первым выходом блока формирования сигналов управления, вход которого соединен с выходом блока задания С 23. Указанный электропривод обладает повышенными энергозатратами при тор ; можении, так как управляемые выпрямитель и преобразователь работают совместно в течение всего тормозного режима.. Цель изобретения - снижение энер -гозатрат при эксплуатации лифтовой под-ьемно-транспортной установки. Указанная цель достигается тем, что в устройство для управления асинхронным электродвигателем с короткозамкнутый ротором и двумя независимыми статорными обмотками с различным числом полюсов, содержа;щее датчик скорости, установленный на валу электродвигателя, управляемый преобразователь,выход которого подключен к статорной обмотке с меньшим числом полюсов, управляемый выпрямитель, выходкоторого подключен к статорной обмотке с большим числом полюсов, первый и второй блоки регулирования, выходы которых соединены соответственно с управляющими входами управляемого преобразователя и управляемого выпрямителя, а входы - с выходом блока сравнения информационный вход которого . соединен с выходом датчика скорости, первый задающий вход блока сравнения соединён с первым выходом блока формирования сигналов управления, вход которого соединен.с выходом блока задания, введены,два нульоргана, первый из Которых содержит на выходе регулируемый фильтр, блок формирования сигналов управления . снабжен вторым и третьим выходами, блок задания снабжен дополнительным входом, блок сравнения снабжен вторым задающим входом, первый блок регулирования снабжен вторым входом, который через первый-нулъ-орган соединен с вторым выходом блока формирования сигналов управления, третий выход которого соединен с вторым задающим входом блока сравнения и через второй нуль-орган - с дополнительным входом блока задания. На фиг. 1 изображена функциональная Схема устройства; на фиг. 2 диаграммы его работы. Устройство содержит двухскоростной асинхронный электродвигатель с короткозамкнутым ротором с двумя незввиси1 ми обмотками 1 и 2 на статоре, соответственно, с меньшим и большим числом полюсов. Обмотка 1 с мены1мм числом полюсов включена на.выход управляемого преобразователя 3, а обмотка с большим числом полюсов 2 - на выход управляемого выпрямителя It. Управляющие входы управляемых преобразовател я 3 и выпрямителя t. подключены к выходам соответственно первого бхюка 5 регулирования и второго блока 6 регулирования, а силовые входы снабжены зажимами для подключения их ,к источнику 7 питания. Управляющие входы блоков регулирования соединены с.выходом блока 8 сравне- I ния информационный вход которого соединен с выходом датчика 9 скорости, блок 10 формирования сигналов управления состоит из трех последовательно, соединенных .блоков форми рования заданий на скорость, ускорение и рывок, выходы которых.образуют три выхода этого блока, первый из которых по заданию скорости соединен с первым задающий входом б ка 8 сравнения, второй выход по заданию на рывок через нуль-ор ган 11.с регулируемым фильтром 12 н выходе, соединен с вторым входом пе вого блока 5 регулирования, третий выход по заданию на ускорение блока формирования сигналов управления Qo динен с вторым задающим входом блок 8 сравнения, а также церез второй нуль-орган 13 соединен с дополнител ным входом блока k задания, задакг щий аналоговый выход которого соединен с входом блока 10 формирования сигналов управления, а логические выходы блока Н соединены соответственно с блокирующими входа ми управляемых преобразователя и выпрямителя. Устройство работает следующим об разом. Команда на начало движения ступает из блока k задания. При этом подается команда на разрешение включения силовых управляемых элементов, например, тиристоров управляемого преобразователя 3 и запрет на работу тиристоров управляемого выпрямителя k. Кроме того, на вход блока 10 формирования сигналов управления, через контакты блока И задания подается постоянный сигнал определенной.величины, из которого в блоке 10 формируются управляющие воздействия по скорости U, рывку Ujj и ускорению , На задающие входы блока сравнения подаются управляющие воздействия по скорости и ускорению непосредственно, а на дополнительный вход блока задания только по ускорению, но через нульорган. 13 и, благодаря чему повышается также чувствительность системы, на второй вход блока 5 управления через нуль-орган П U..c регулируемым фильтром 12 на выходе поступает управляющее воздействие по рывку, благодаря которому рег.паментируется усилие на канате иобес печивается выход двигателя на естественную механическую характеристику. Управляемый преобразователь 3 предназначен для регулирования напряжения переменного тока на обмотке 1 двигателя с меньшим числом полюсов, т.е. для создания регулируемого движущего момента, а управляемый выпрямитель k для регулирования постоянного тока на обмотке 2 С большим числом полюсов т.е. для создания тормозного момента. Двигатель плавно пускается в соответствии, с заданной диаграммой движения. В связи с тем, что с выхода блока k задания подается сигнал запрета . работы управляемого выпрямителя t, разгон осуществляется только регулированием напряжения на обмотке с меньшим числом полюсов 1. Повышение точности формирования заданной кривой движения достигается в указанной системе; применением регулирования по ускорению. В конце переходного процесса пуска, в момент времени t (фиг. 2), на вход блока 3 регулирования пода ется дополнительный сигнал с выхода нуль-органа 11 через фильтр 12, что приводит к увеличению напряжения на выходе управляемого преобразователя 3 напряжения, т.е. на с мотке 1 двигателя с меньшим числом полюсов, и двигатель плавно достигает установившейся частоты вращения, соответствующей работе на естественной механической характеристике. Двигатель работает с установившейся частотой вращения до «)мента 2 (фиг. 2) поступления команды на начало замедления из блока k задания. Это приводит к тому, что на выходах блока 10 формирования сигналов управления появляются напряжения тормозного режима работы. Одновременно с этим снимается запрет на работу силовых управляемых элементов управляемого выпрямителя 4 и во второй независимойобмотке 2 с большим числом полюсов появляется выпрямленный ток. В двигателе наряду с вращающимся полем возникает неподвижное поле, созда-; ющее на валу тормозной момент. Такое совместное питание двигателя переменным и постоянным токами необходимо для обеспечений плавного изменения скорости в начале замедления. Одновременная работа упраляемых преобразователя 3 и управляемого выпрямителя продолжается
до момента t (фиг, 2), когда с выхода нуль-органа 13 поступает сигнал на дополнительный вход блока И задания. Последний снимает управляющие импульсы с силовых элементов управляемого преобразователя 3 и запрещает его работу,
В момент времени t, когда сигнал задания ускорения достигает постоянной величины, на выходе нульоргана 13 скачком появляется сигнал. С момента времени t работает управляемый выпрямитель 5, обеспечивая регулирование постоянного тока, а соответственно, и тормозное го момента двигателя. Двигатель замедляется по заданной диаграмме.
При скорости равной нулю на вал дви. гателя накладывается механический тормоз.
в электроприводе достигаются луч5 («ие энергетические показатели за счет устранения дополнительных потерь энергии вдвигателе, возникаюи|их при работе на искусственных регулировочных механических характеОристиках. Кроме того, улучшается коэффициент мощности при работе двигателя с установившейся частотой вра1цения, поскольку регулируемый преоб.разователь k в этом случае полностью
5 открыт. При работе в тормозном режиме наоборот - большую часть времени он полностью закрыт.
л
/


| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| Способ управления вентильным электродвигателем со звеном постоянного тока при изменении знака его момента и устройство для его осуществления | 1983 |
|
SU1124408A1 |
| Регулируемый электропривод | 1988 |
|
SU1629956A1 |
| Электропривод переменного тока | 1985 |
|
SU1275732A1 |
| Устройство для управления вентиль-НыМ элЕКТРОдВигАТЕлЕМ | 1979 |
|
SU813609A1 |
| Вентильный электродвигатель | 1980 |
|
SU964882A1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВУХСКОРОСТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ДУТЬЕВОГО ВЕНТИЛЯТОРА | 2015 |
|
RU2577515C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1166257A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТШ РОТОРОМ И ДВУМЯ НЕЗАВИСИМЫМИ СТАТОРНЫМИ ОБМОТКАМИ С РАЗЛИЧНЫМ ЧИСЛОМ ПОЛЮСОВ, содержащее датчик скорости, установленный на валу электродвигателя, управляемый преобразователь, выход которого подключен к стйторной.обмотке с меньший числом полюсов, управляемый выпрямитель, выход которого подключен .к статорной.обмотке с большим числом полюсов, первый и второй блоки регулирования, выходы которых соединены соответственно с управляющими входами управляемого преобразователя и управляемого выпрямителя, а входы - с выходом бхюка сравнения, информационный вход которого соединен с выходом датчика скорости, первый задающий вход блока сравнения соединен с первым выходом блока формирования сигналов управления, вход которого соединен с выходом блока задания, о,т л и чающееся тем, что, с целью снижения энергозатрат, в него введены два нуль-органа, первый из которых содержит на выходе регулируемый фильтр, блок формирования сигналов управления снабжен вторым и третьим выходами, блок задания снабжен дополнительным входом, блок сравнения снабжен вторым задающим входом, первый блок регулирования снабжен вторым входом, который через первый нуль-орган соединен с вторым СО О выходом блока формирования сигналов управления, третий выход которого х соединен с вторым задаю1чим входом 4 бхюка сравнения и через второй нульорган - с дополнительным входом блока задания.
г/.
у
Uj
X
л
и
11
