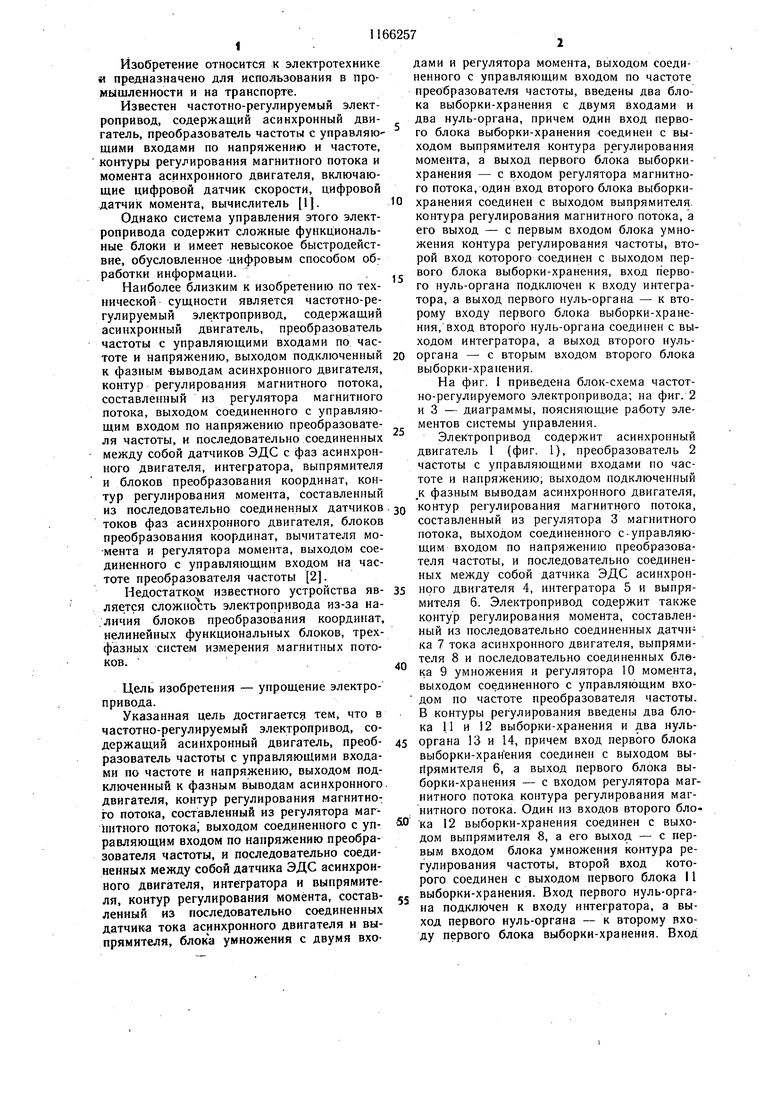
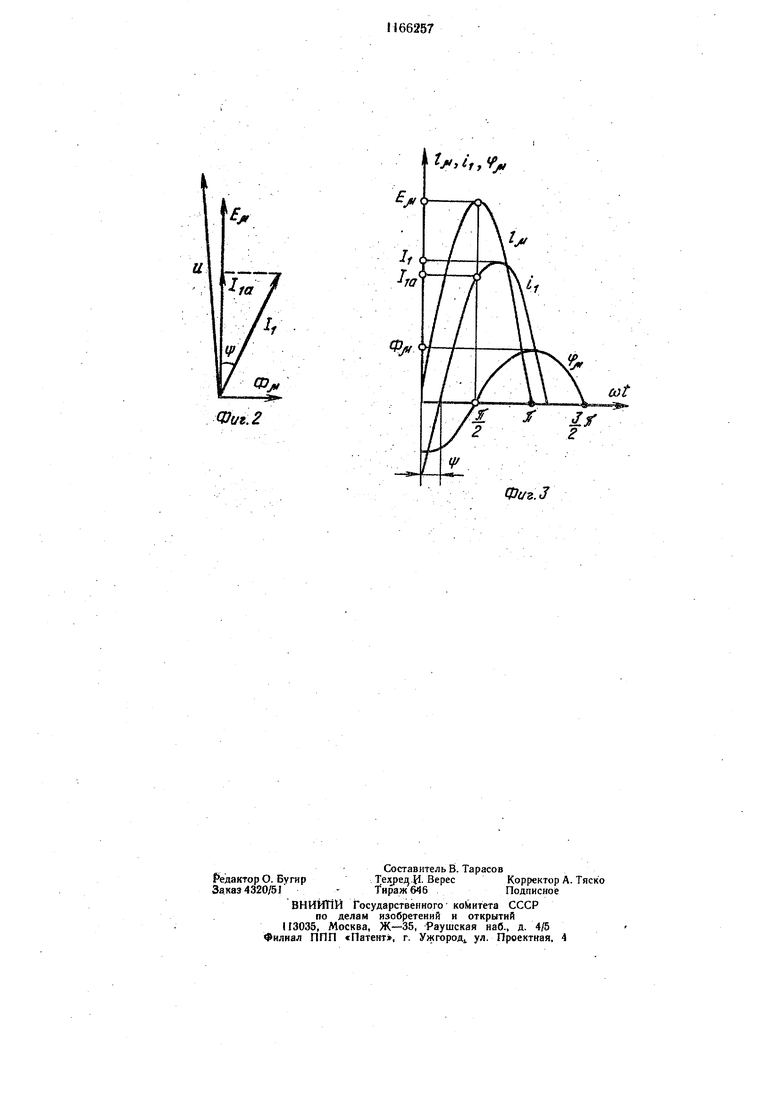
Изобретение относится к электротехнике « предназначено для использования в промышленности и на транспорте. Известен частотно-регулируемый электропривод, содержащий асинхронный двигатель, преобразователь частоты с управляющими входами по напряжению и частоте, контуры peгy иpoвaния магнитного потока и момента асинхронного двигателя, включающие цифровой датчик скорости, цифровой датчик момента, вычислитель 1. Однако система управления этого электропривода содержит сложные функциональные блоки и имеет невысокое быстродействие, обусловленное Цифровым способом об: работки информации. Наиболее близким к изобретению по технической сущности является частотно-регулируемый электропривод, содержащий асинхронный двигатель, преобразователь частоты с управляющими входами по частоте и напряжению, выходом подключенный к фазным -выводам асинхронного двигателя, контур регулирования магнитного потока, составленный из регулятора магнитного потока, выходом соединенного с управляющим входом по напряжению преобразователя частоты, н последовательно соединенных между собой датчиков ЭДС с фаз асинхронного двигателя, интегратора, выпрямителя и блоков преобразования координат, контур регулирования момента, составленный из последовательно соединенных датчиков токов фаз асинхронного двигателя, блоков преобразования координат, вычитателя момента и регулятора момента, выходом соединенного с управляющим входом на частоте преобразователя частоты 2. Недостатком известного устройства является сложность электропривода из-за на.личия блоков преобразования координат, нелинейных функциональных блоков, трехфазных систем измерения магнитных потоков. Цель изобретения - упрощение электропривода. Указанная цель достигается тем, что в частотно-регулируемый электропривод, содержащий асинхронный двигатель, преобразователь частоты с управляющими входами по частоте и напряжению, выходом подключенный к фазным выводам асинхронного, двигателя, контур регулирования магнитно: го потока, составленный из регулятора магпитного потока; выходом соединенного с управляющим входом по напряжению преобразователя частоты, и последовательно соединенных между собой датчика ЭДС асинхронного двигателя, интегратора и выпрямителя, контур регулирования момента, составленный из последовательно соединенных датчика тока асинхронного двигателя и выпрямителя, блока умножения с двумя входами и регулятора момента, выходом соединенного с управляющим входом по частоте преобразователя частоты, введены два блока выборки-хранения с двумя входами и два нуль-органа, причем один вход первого блока выборки-хранения соединен с выходом выпрямителя контура регулирования момента, а выход первого блока выборкихранения - с входом регулятора магнитного потока, один вход второго блока выборкихранения соединен с выходом выпрямителя, контура регулирования магнитного потока, а его выход - с первым входом блока умножения контура регулирования частоты, второй вход которого соединен с выходом первогО блока выборки-хранения, вход первого нуль-органа подключен к входу интегратора, а выход первого нуль-органа - к второму входу первого блока выборки-хранения, вход второго нуль-органа соединен с выходом интегратора, а выход второго нульоргана - с вторым входом второго блока выборки-хранения. На фиг. I приведена блок-схема частотно-регулируемого электропривода; на фиг. 2 и 3 - диаграммы, поясняющие работу элементов системы управления. Электропривод содержит асинхронный двигатель 1 (фиг. 1), преобразователь 2 частоты с управляющими входами по частоте и напряжению, выходом подключенный к фазным выводам асинхронного двигателя. контур регулирования магнитного потока. составленный из регулятора 3 магнитного потока, выходом соединенного с-управляющим входом по напряжению преобразователя частоты, и последовательно соединенных между собой датчика ЭДС асинхропного двигателя 4, интегратора 5 и выпрямителя 6. Электропривод содержит также контур регулирования момента, составленный из последовательно соединенных датчика 7 тока асинхронного двигателя, выпрямителя 8 и последовательно соединенных блека 9 умножения и регулятора 10 момента, выходом соединенного с управляющим входом по частоте преобразователя частоты. В контуры регулирования введены два блока 11 и 12 выборки-хранения и два нульоргана 13 и 14, причем вход первого блока выборки-хранения соединен с выходом выЛрямителя 6, а выход первого блока выборки-хранения - с входом регулятора магнитного потока контура регулирования магнитного потока. Один из входов второго блока 12 выборки-хранения соединен с выходом выпрямителя 8, а его выход - с первым входом блока умножения контура регулирования частоты, второй вход которого соединен с выходом первого блока 11 выборки-хранения. Вход первого нуль-органа подключен к входу интегратора, а выход первого нуль-органа - к второму входу первого блока выборки-хранения. Вход второго нуль-органа соединен с выходом инterparopa, а выход второго нуль-органа - с вторым входом второго блока выборки-хранення. Устройство работает следующим обра3QM. Управляющими воздействиями частотнорегулируемого электропривода являются заданные значения момента М и- магнитного потока Фз асинхронного двигателя. .Сигналы, пропорциональные заданным значениям момента и магнитного потока,поступают на задающие входы соответственно регулятора 10 момента и регулятора 3 магнитного потока. На измерительные входы регуляторов .10 и 3 поступают сигналы, пропорциональные текущим значениям момента М магнитного потока Ф. На выходе регулятора 10 момента и регулятора 3 магнитного потока формируются сигналы, задающие соответственно частоту |и напряжение и на выходе преобразователя 2 частоты. Измерение текущего значения магнитного потока и преобразование его в сигнал аналоговой формы осуществляются схемой, включающей датчик ЭДС 4, интегратор 5, выпрямитель 6, нуль-орган 13, блок 11 выборки-хранения. Чувствительным элементом датчика ЭДС является измерительная обмотка, расположенная в пазах статора асинхронного двигателя. Сигнал с выхода датчика ЭДС, пропорциональный первой гармонике Тйгновенного значения ЭДС li E/4sm( (фиг. 2 и 3), поступает на вход интегратора 5, на выходе которого формируется сигнал, пропорциональный мгновенному значению магнитного потока ju фJas,n(wi-). Выходной сигнал интегратора выпрямляется выпрямителем 6 и подается на информационный вход блока 11 выборки-хранения, который осуществляет выборку амплитудного значения магнитного потока Ф и хранение этого значения в течение полупериода частоты работы преобразователя. Между датчиком ЭДС и блоком И выборки-храиения включения нуль-орган 13, который фиксирует моменты перехода ЭДС через ноль и.генерируетв эти моменты короткие .импульсы, переводящие блек 11 выборки-хранения , в режим выборки. Сигнал на выходе блока выборки-хранения не изменяется в течение полупериода частоты и не содержит гармонических составляющих, т.е. блок выборкихранения выполняет функции фильтра с постоянной времени, равной полупериоду частоты. тогда как обычный фильтр имеет постоянную времени не менее десяти периодов частоты работы преобразователя. Измерение мгновенного значения момента асинхронного двигателя и преобразование его в сигнал аналоговой формы осуществляется схемой, включающей датчик тока асинхронного двигателя, двухполупериодный выпрямитель 8, нуль-орган 14, блок 12 выборки-хранения и блок 9 умножения сигналов. Сигнал с выхода датчика 7, пропорциональный первой гармонике тока асинхронного двигателя ii J/msin(u/t -), поступает на выпрямитель 8, выход которого подключен к информационному входу блока 12 выборки-хранения. Этот блок осуществляет выборку сигнала, пропорционального проекции амплитудного значения вектора тока асинхронного двигателя на ось, совмещенную с вектором ЭДС Jia JimCOsJ(фиг. 2, 3). Между интегратором 5 и управляющим входом блока 12 выборки-хранения включен нуль-орган 14, который фиксирует момент перехода через ноль мгновенного значения магнитного потока 5j« и генерирует в эти моменты короткие импульсы, переводящие блок 12 выборки-хранения в режим выборки. Так же, как и в схеме измерения магнитного потока, в этом случае достигается максимальное быстродействие преобразования значения проекции вектора тока в сигнал аналоговой формы. Выходные сигналы блоков Пи 12 выборки-хранения поступают на входы блока умножения, на выходе которого формируется сигнал, пропорциональный моменту асинхронного двигателя. Этот сигнал подается на измерительный вход регулятора 10 момента, и на измерительный вход регулятора магнитного потока поступает с выхода блока 11 выборки-хранения сигнал, пропорциональный амплитудному значению магнитного потока Ф. Введение в контуры обратных связей частотно-регулируемого электропривода блоков выборки-хранения, управляемых нульорганами, позволяет существенно упростить систему автоматического управления электроприводом при сохранении быстродействия и точности. Предлагаемый частотно-регулируемый привод проще, так как не содержит преобразований координат и нелинейные функциональные блоки, которые сложны в реализации и настройке.
Фиг, 2
,/,,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Способ автоматического управления частотно-регулируемого электропривода и устройство для осуществления этого способа | 1975 |
|
SU558366A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| Электропривод постоянного тока с упругой связью между электродвигателем и механизмом | 1988 |
|
SU1552324A1 |
| Устройство для измерения магнитного потока асинхронной машины | 1977 |
|
SU746334A1 |
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный двигатель, преобразователь частоты с управляющими входами по частоте и напряжению, выходом подключенный к ф.аз ным выводам асинхронного двигателя, контур регулирования магнитного потока, составленный из регулятора магнитного потока, выходом соединенного с управляющим входом по напряжению преобразователя частоты, и последовательно соединенных между собой датчика ЭДС асинхронного двигателя, интегратора и выпрямителя, контур регулирования момента, составленный из последовательно соединенных датчика тока асинхронного двигателя и выпрямителя, блока умножения j: двумя входами и регулятора момента, выходом соединенного с управляющим входом по частоте преобразователя час7оты, отличающийся тем, что, с .целью упрощения, в него введены два блока выборки-хранения.с двумя входами и два нуль-органа, причем один вход первого блока выборки-хранения соединен с выходом вь(: прямителя контура регулирования момента, а выход первого блока выборки хранения- С входом регулятора магнитного, потока один вход второго блока выборки-хранения соединен с ВЫХОДО1И выпрямителя контура i регулирования магнитного потока, а его выход - с первым входом блока умножения (Л контура регулирования частоты, второй вход которого соединен с выхрдом первого блока С выборки-хранения, вход первого нуль-органа подключен к входу интегратора, а выход первого нуль-органа - к второму входу первого блока выборки-хранения, вход второго нуль-органа соединен с выходом интегратора, а выход второго нуль-органа - с вторым входом второго блока выборки-хранения. О5 О5 ГС СП 
| Частотно-управляемый электропривод | 1974 |
|
SU587589A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ,2 | |||
| Патент США № 4023083, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
