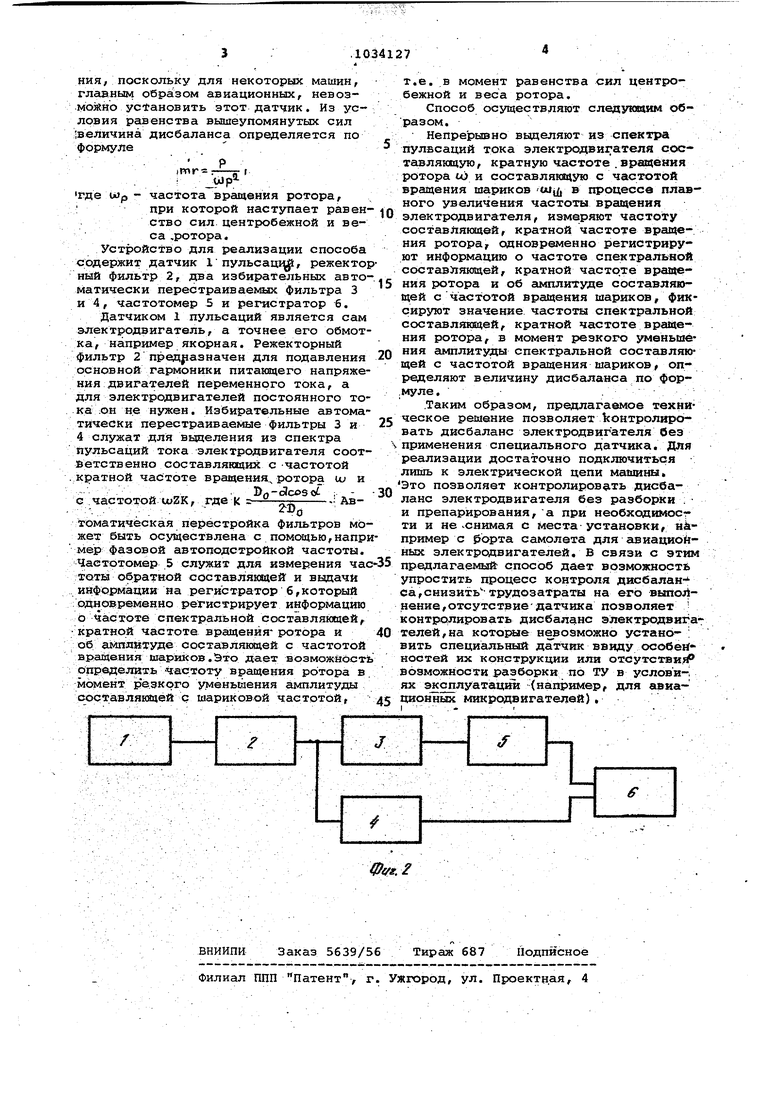
Изобретение относится к электрическим машинам, преимущественно авиационным, и может быть использовано при контроле дисбаланса собранных электродвигателей в процессе производства и эксплуатации. Известны способы измерения дисбаланса, основанные на использовании датчика неуравновешенности, преобразующего механические колебания ротора 9 электрический сигнал 1. Наиболее близким к предлагаемому по Технической сущности является спо соб контроля дисбаланса ротора элект ролвигателя, установленного на шарикоподшипниках, основанный на непрерьшном изменении частоты вращения ро Гора U и процессе ее плавного увели .чения, фиксации значения частоты вра щения, при котором центробежная сила дисбаланса равна весу ротора, и на оценке величины дисбаланса из условия равенства этих сил. Cnqpo6 заключается в следующем: постепенно увеличивая скорость враще ния электрической машины, наблюдают возникновение эксцентриситета, напри мер из-за смещения оси вращения за счет радиального зазора в подшипниках, смещение измеряется с помощью датчика, закрепленного вблизи поверх ности ротора, при равенстве центробежной силы и беса ротора происходит выбор радиального зазора в подшипниках, что фиксируется датчиком; это позволяет определять дисбаланс ротора машины 2. Недостатком известного способа яв ляется необходимость установки на электрическую мгиаину датчика для фик сации Момента выбора зазора в подшип никах вращающегося ротора, когда нас тупаёт равенство центробежной силы от дисбаланса и веса ротора, усложня ет реализацию способа. Цель изобретения - упрощение и расширение области применения. Поставленная цель достигается сог ласно Способу контроля дисбаланса ро тора электродвигателя, установленного на шарикоподшипниках, основанному На непрерывном измерении частоты вра щения ротора U в процессе ее плавно го увеличения, фиксации значения час тоты вращения, при котором центробеж ная сила от дисбаланса ротора равна весу ротора, и на оценке величины дисбаланса из условия равенства этих сил, измеряют ток двигателя, вьвделяют :из него составляющую с частотой эраедения шариков Djj-clcosoi 2Вл где Z - число шариков подшипника D - Диаметр подшипника по центре тел качения; d - диаметр шариков; pt- - угол контакта, а фиксацию искомой частоты вращения ротора производят в момент скачкообразного уменьшения амплитуды составляющей тока с частотой ш. На фиг. 1 приведено схематичное изображение зазора в подшипнике элект рической машины горизонтального исполнения; на фиг. 2 - структурная схема устройства для реализации способа. При вращении ротора электрической машины с угловой частотой U) под действием силы R, являющейся результирующей сил веса ротора Р и центробежной F, от его неуравновешенности происходит движение ротора па траектории, зависящей от соотношениямежду этими силами. Центробежная сила F, создаваемая неуравновешенной массой т, расположенной на расстоянии г от оси вращения, определяется по формуле ре mruJ 2. , При частоте вращения ротора, когда центробежная сила F меньше силы юеса ротора Р, ротор совершает кача-тельное движение, перекатываясь по нижним шарикам подшипников. Амплитуда колебательного движения ротора зависит от зазоров в подшипнике,а часто та равна частоте прокатывания ротора по шарикам ш, Колебания ротора модулируют магнитный поток в электрической машине, что приводит к наведению ЭДС данной частоты, а следовательно, обуславливает присутствие в спектре пульсаций тока электродвигателя составляющей, соответствующей частоты. в случае, когда центробежная сила становится больше сиЛы веса ротора, ротор совершает обкатьшание всех шариков в подшипнике. Теперь частота колебаний ротора, обусловленная его прокатьшанием по шарикам, определяется по формуле и +61005 С(. - 2Во Таким образом, при плавном увеличении частоты вращения электродвигателя в момент равенства, центробежной силы и силы веса ротора происходит смена режимов движения ротора в подшипнике, а в связи с этим в спектре пульсаций тока электродвигателя вместо одной составляющей и1д, появляется другая j, что можно определить по резкому уменьшению амплитуды спектральной составляющей с шариковой частотой (частотой прокатывания по шарикам в режиме качания ротора). Это дает возможность косвенным путем контролировать дисбаланс ротора электродвигателя без использования специального датчика, что упрощает процесс контроля и расширяет область -применения, поскольку для некоторьсс машин, глаеным образом авиационныхг невозмойно установить этот датчик. Из условия равенства вышеупомянутых сил величина дисбаланса определяется по формуле imr--.( i Где Wp - частота вращения ротора, ; при которой наступает равенство сил. центробежной и веса ,ротора. Устройство для реализации способа содержит датчик 1 пульсащ, режектор ный фильтр 2, два избирательных автоматически перестраиваемых фильтра 3 и 4, частотомер 5 и регистратор 6. Датчиком 1 пульсаций является сам электродвигатель, а точнее его обмотка, например якорная. Режекторный фильтр 2 пред 1азначен для подавления основной гармоники питающего напряжения двигателей переменного тока, а для электродвигателей постоянного то. не нужен. Избирательные автоматически перестраиваемые фильтры 3 и 4 служат для вьиеления из спектра пульсаций тока электродвигателя соответственно составляющих с частотой .кратной частоте вращения., ротора tu и Вр-сЗсозо с.частотой ш2К, где к тематическая перестройка фильтров может быть осуществлена с помсадью,напри фазовой автоподстройкой частоты. Частотомер 5 служит для измерения час TOTbj обратной составляквдей и выдачи информации на регистратор б,который ;одновременно регистрирует информацию о ча стоте спектральной составляющей кратной частоте вращения ротора и об айплйтуде составляющей с частотой врайения шариков.Зто дает возможность onpesejraTb Частоту вращения ротора в мсмент рЪзкого у1леньшения амплитуды составляющей с шариковой частотой,
ъ т.е. в момент равенства сил центробежной и веса ротора. Способ осуществляют следующим образом. Непрерывно выделяют из спектра пулвсаций тока электроявигателя составляющую, кратную частоте . вращения ротора со и составляющую с частотой вращения шариков tuy, в процессе плавного увеличения частоты вращения электродвигателя иэмевряют частоту составЛякяцей, кратной частоте вращения ротора, одновременно регистрируют информацию о частоте спектральной составляющей, кратной частоте вращения ротора и об амплитуде составляющей с частотой вращения шариков, фиксируют значение частоты спектральной составлякщей, кратной частоте вращения ротора, в момент резкого уменьшения амплитуды спектральной составляющей с частотой вращения шариков, определяют величину дисбаланса по фор,муле, . .Таким образом, предлагаемое техническое решение позволяет онтролирбвать дисбаланс электродвигателя без применения специального датчика. Для реализации достаточно подключиться лишь к электрической цепи машины. Это позволяет контролировать дисбаланс электродвигателя без разборки : и препарирования, а при необходимосг ти и не снимая с места установки, н пример с &6рта самолета для гшиациойных электродвигателей. В связи с этим предлагаемый способ дает возможность упростить процесс контроля дисбалан- са,снизить -трудозатраты на его выпоЛнение,отсутствие-датчика позволяет i контролировать дисбаланс электродвигателей, на которие невозможно устано- : вить специальный датт1ик ввиду особейкостей их конструкции или отсутс гаияР Возможности разборки по ТУ в услови-i ях ЭJccплyaтaцIШ (например, для авиационных микродвигателей).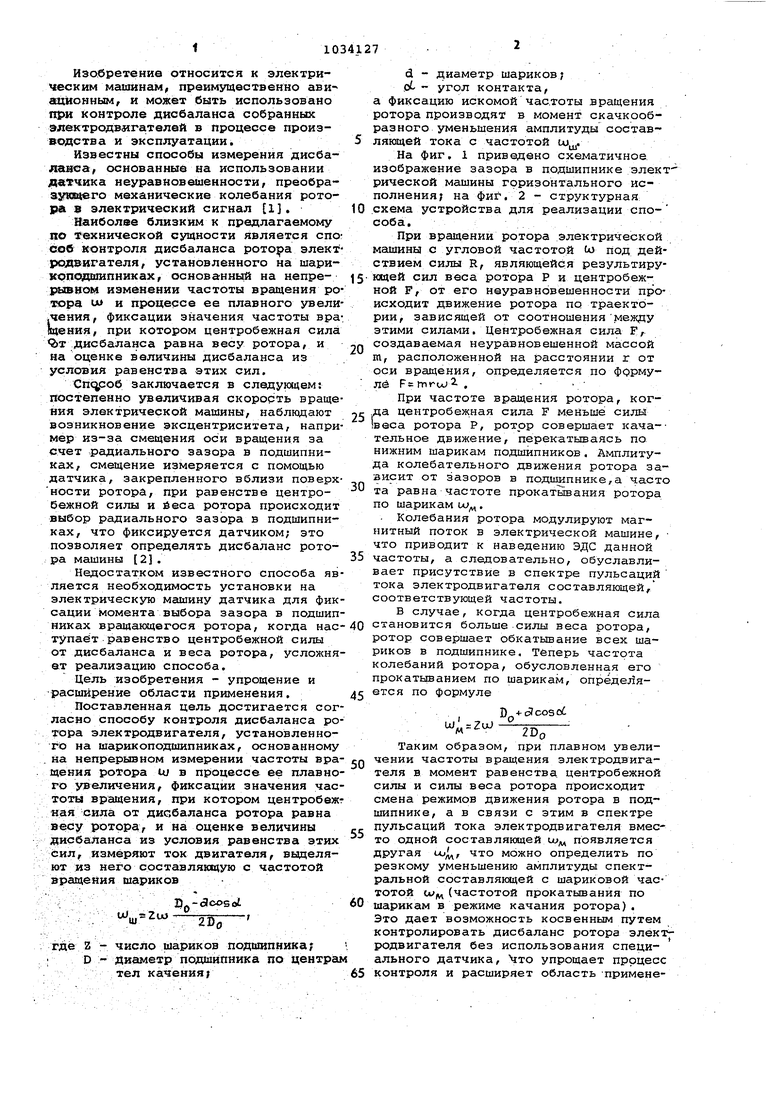
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения величины дисбаланса роторов | 1983 |
|
SU1145253A1 |
| Устройство диагностирования шарикоподшипников электрической машины | 1983 |
|
SU1107220A1 |
| СПОСОБ ДИАГНОСТИКИ МЕХАНИЗМОВ И СИСТЕМ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2009 |
|
RU2431152C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |
| Способ контроля электрической машины | 1980 |
|
SU911385A1 |
| СПОСОБ ИСПЫТАНИЙ НА РЕСУРС ЦЕНТРОБЕЖНОГО ЭЛЕКТРОНАСОСНОГО АГРЕГАТА СИСТЕМЫ ТЕРМОРЕГУЛИРОВАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2402464C1 |
| Устройство для контроля вибраций электрической машины | 1981 |
|
SU1015316A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Устройство контроля шарикоподшипников электрической машины | 1984 |
|
SU1176419A1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2010 |
|
RU2496934C1 |
СПОСОБ КОНТРОЛЯ ДИСБАЛАНСА РОТОРА ЭЛBKTPOJCЭИГATBЛЯ, установлен ,ного на шарикоподшипниках, основанный на HenpeiaiiBH H 4 измерении частоты вращения ротора UI в процессе ее плавного увеличения, фиксации значения частоты вращения, при котором центробежная сила от дисбаланса ротора равна весу ротора, и на оценке величины дисбаланса из условия равенства этих сил, отличающий с. я тем, что, с целью упрощения способа и рас-, ширения области его применения, измеряют ток двигателя, вьщеляют из него составляющую с частотой вращения шариков. 2),.-c3cosoi t i% 2w 2D« где 2 - число шариков подшипника; Djj - диаметр подшипника по центрам тел качения; а.- дигметр шариков; ot - угол контакта; a фиксацию частоты вращения ротора производят в момент скачкооб разного уменьшения амплитуды составляющей тока с частотой .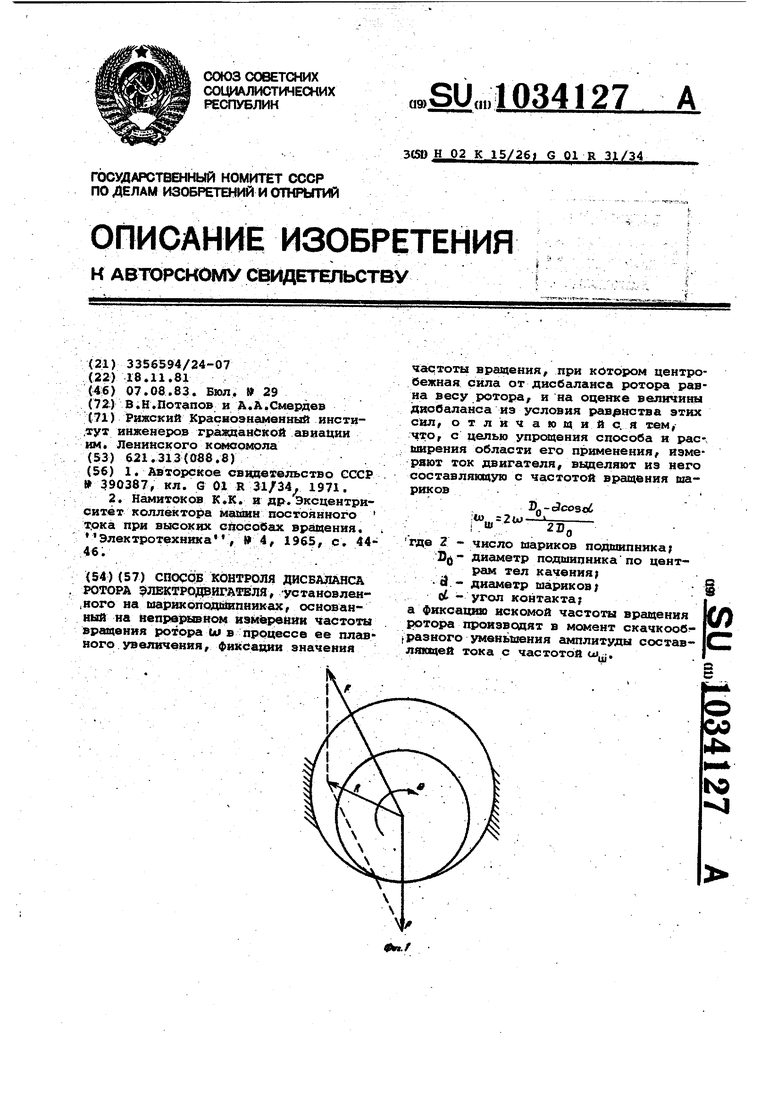
Хй/л/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ УСИЛИЙ РЕЗАНИЯ ПРИ СВЕРЛЕНИИ | 0 |
|
SU390387A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Намитоков | |||
| и др | |||
| Эксцентриситет коллектора маши постоянного тока при вьюоких сяособгис вращения | |||
| Электротехника | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| - - | |||
| / : | |||
