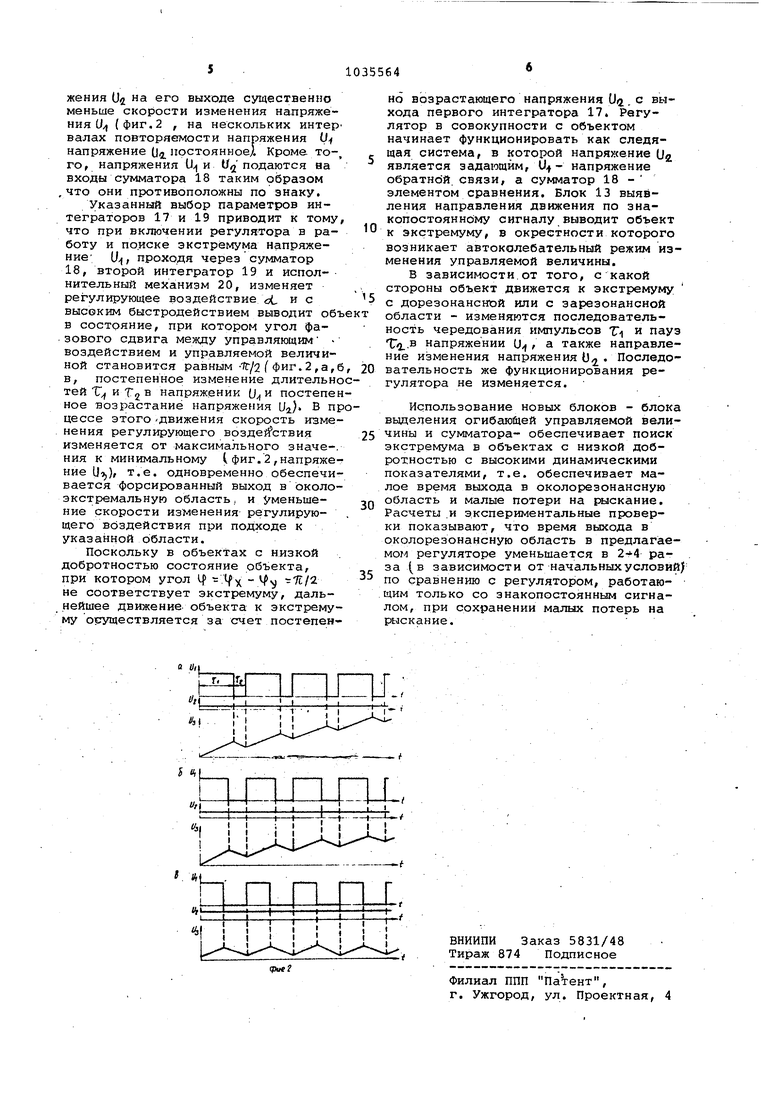
Изобретение относится к самонастраивающимся системам управления и может быть использовано в системах автоматического управления резонансными объектами ( вибрационными технологическиг.1И машинами различного назначения,RbC .-контурами и т.д.) Известен экстремальный регулятор используемый для выявления и поддержания экстремума в объектах обладающих экстремальной статической харак теристикой, дрейфующей при изменении внутренних и внешних возмущений, поступающих на объект. РёгуЛятор применим для поиска и поддержания экстремума в объектах, у которых управляемая величина является знакопостоянной, т.е. имеет неколебальный характер и не сопровождается периодическим изменением знака. Регулятор содержит блок выявления направления движения к -экстремуму по знакопостоянному сигналу, включающий запоминающее устройство, элемент сравнения и реле знака, а также интегратор и исполнительный механизм LlJ- Недостатком известйого регулятора является то, что при выявлении экстремума скорость изменения регулирующего воздействия является постоянной независимо от того, на каком расстоянии от экстремальной точки находится объект. Для улучшения же динамики экстремального регулирования необходимо минимизировать время выхода в зону экстремума и потери на рыскание в окрестности, экстремума. Особенно актуальными являются минимизация времени выхода в зону экстрег ма для объектов, работающих в режиме частных пусков и остановок, и уменьшение потерь на рыскание в объектах, не допускающих колебаний управляемой величины по технологическш 1 причинам. Наиболее близким к изобретению техническим решением является экстре мальный регулятор для резонансного объекта, содержащий последовательно соединенные блок выявления направления движения по знакопостоянному сиг налу и первый интегратор и последова тельно соединенные, второй интегратор исполнительный механизм подключенный выходом к входу резонансного объекта и последовательно соединенные датчик выходной величины резонансного объек та и блок выявления направления движения по знакопе,ременному сигналу 2 Недостатком известного регулятора является ограниченная область его . применения, поскольку регулято) обес печивает поиск и поддержание экстремума только в объектах, обладанядих высокой добротностью. В подобных объек тах угол фазного сдвига между управляющим воздействием и управляемой ве личиной при резона.нсе (экстремальный режим) составляет It/2 . Однако ряд объектов вибрационные технологические, машины, устройства для индукционного нагрева и т.д.) либо изменяют свою добротность в процессе выполнения технологических операций, либо характеризуются -низкой добротностью. В этом случае указанный угол не равен 7t/2. и известный регулятор приводит к значительным погрешностям при определении экстремума и при его поддержании, что ограничивает его использование. Цель изобретения - повышение точности регулятора. Поставленная цель достигается тем, что регулятор содержит сумматор, подключенный первым входом к выходу пер-° вого интегратора, вторым входом к выходу блока выявления направления движения по знакопеременному сигналу, а выходом - к входу второго интегратофа, и пиковый детектор подключенный входом к выходу датчика выходной величины, резонансного объекта, а выходом - к входу блока выявления направления движения по знакопостоянному сигналу. На фиг.1 изображ.ена схема регулятора, на фиг.2 - эпюры напряжений, поясняющие его работу. Блок-схема (фиг.1) содержит резонансный обьект 1, датчик 2 управляющего воздействия, датчик 3 выходной величины резонансного объекта, блок 4 выявления направления дви-жения по знакопеременному сигналу состоящий из первого порогового элемента 5, второго порогового элемента б, первого дифференциатора 7, второго дифференциатора 8, первого выпрямишеля 9, второго выпрямителя 10 и триггера 11, пиковый детектор 12, блок 13 выявления направления движения по знакопостоянному сигналу, состо}пций из запоминающего устройства 14, элемента 15 сравнения и реле 16 знака, первый интегратор 17, сумматор 18, второй интегратор 19, испол-, нительный механизм 20. На фиг.1 также обозначено: X ,равляющее воздействие, подаваемое на шину управляющего воздействия, - управляемая величина, подаваемая на шину управляемой величины, cL -регулирующее воздействие, а на фиг. 20 напряжение на выходе триггера 11, U,j,- напряжение на выходе первого интегратора 17; Ui,- напряжение на выходе второго интегратора 19, когда напряжение U.отсутствует (равно нулю); Т) - длительность нахождения триггера 11 в одном устойчивом состоянии; TI-длительность нахождения триггера 11 в другом устойчивом состоянии t время.; Экстремальный регулятор для резонансного- объекта работает следующим образом. В резонансном объекте 1 (фиг.1 выделяют кансш с экстремальной характеристикой, максимум или минимум которой необходимо выявлять и поддерживать, и канал с монотонно характеристикой. Входом канала с экстремальной ха рактеристикой является знакоперемен ное регулирующее воздействие oLf выходом - знакопеременная управляемая величина V . Входом канала с монотонной характеристикой является то же регулирующее воздействие оС а выходом - угол фазового сдвига if г у у между знакопеременным управляющим воздействием X и знакопеременно величиной У . Однозначное соответствие между указанными амплитудной характеристикой объекта, имеющего экстремум, и фазовой характеристикой объекта позволяет использовать их как в отдельности, так и совместно для поис и поддержания экстремума в резонанс ных объектах, обладающих в общем случае низкой добротностью. Величина добротности является достаточной и характерной для многих технологических объектов, в KOTojMX осуществляются процессы виброуплотнения, вибротранспортирования, вибропереме шивания и т.д., причем добротность в этих процессах непрерывно изменяе ся. Входящие в экстремальный регулят датчик 2 управляющего воздействия и датчик 3 преобразуют сигналы X и ) в сигналы, имеющие одинаковую физическую природу. Пороговые элементы 5 и б в блоке 4 преобразуют сигналы с датчиков в последовательности однополярных прямоугольных импульсов, длительнос ти которых составляют половину пери дов сигналов, снимаемых с датчиков, и фазовый сдвиг между которыми равен Ч Vfy-If . Дифференциаторами 7 и 8 прямоугольные импульсы преобразуются в двупЬлярные последовательности узких шлтульсов, через выпрямители 9 и 10 поступающие на входы триггера 11 с раздельными вхо дами. Чередующимися импульсами обеих последовательностей триггер 11 пере ключается из ОДНО1-О устойчивого сос (Тряния в другое, при этом взаимное временное расположение импульсов, поступающих на входы триггера 11, , соответственно, различие в дли тельностях TJ импульса и Ti паузы, .образугацихся на выкоде триггера 11 и формирующих напряжение и(Фиг.2), являются признаком, использование которого позволяет осуществить движение к экстремуму. Использование признака основано на том, что при интегрировании напряжения и при не равных значениях т и tr появляется напряжение, которое в среднем имеет отличную от нуля скорость изменения и которое заставляет изменяться регу-лирующее воздействие at, таким образом, чтобы управляемая величина стремилась к экстремуму. При равных значениях и Tii , имегадих место, когда фазовый сдвиг f- ty f) - t/2/ интегрирование напряжения 0 приводит к появлению напряжения, средняя скорость изменения которого равна . нулю. Поскольку фазовый сдвиг ( в резонансных объектах с высокой добротностью соответствует экстремуму управляемой величины (резонансу/ то для таких объектов равенство Т, и TOL эквивалентно нахождению объекта в экстремуме или же автоколебательному движению объекта в окрестности экстремума. С учетом сформулированного признака для выведения объекта в резонансную область напряжение 0, через сумматор 18 подается на второй интегратор 19, параметры .которого выбраны таким образом, чтобы с высоким быстродействием формировалось напряжение U-J через исполнительный механизм 20 устанавливающее такое значение регулирующего воздействия cL , при котором в объекте достигается .экстремум управляемой величины. В объектах с низкой добротностью фазовой сдвиг Ц /у - уже не соответствует экстремуму, и требуется дополнительное воздействие на объект с целью поиска и поддержания экстремума управляемой величины. Для осуществления дополнительного воздействия на объект в регуляторе используют блок 12 выделения огибающей управляемой величины и блок 13 выявления направления движения к экстремуму по знакопостоянному сигналу. На вход блока 12 подается знакопеременный сигнал с выхода датчика 3, на выходе блока формируется знакопостоянный сигнал, поступакяций на вход блока 13 выявления направления движения по знакопостоянному сигналу. Блок 13 работает по принципу запоминания экстремума . С выхода блока 13 сигнал через первый интегратор 17 поступает на первый вход сумматора 18, на второй вход которого подается сигнал с выхода триггера 11. Входные сигналы на суьлматрр 18 поступают в виде напряжения и(фиг.2) с выхода триггера 11 несущего информацию о фазовом сдвиге между управ ляющим воздействием и управляемой величиной, и напряжение выхода первого интегратора 17, несущего информацию об амплитуде управляемой величины, причем параметры первого интегратора 17 выбраны таким обра- зом, что скорость изменения напря
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор для резонансного объекта | 1975 |
|
SU590695A1 |
| Экстремальный регулятор для резонансного объекта | 1981 |
|
SU979306A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Синхронно-синфазный электромагнитный вибропривод | 1980 |
|
SU964885A1 |
| Устройство для регулирования частоты колебаний платформы | 1978 |
|
SU752254A1 |
| Экстремальный регулятор для резонансногоОб'ЕКТА | 1979 |
|
SU798705A1 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| Устройство для управления резонансным объектом | 1979 |
|
SU781780A1 |
| Экстремальный регулятор для резонансного объекта | 1987 |
|
SU1413598A1 |
| Ультразвуковой фазовый измеритель виброперемещений | 1984 |
|
SU1254334A1 |
ЭКСРРЕМАЛЬШай РЕГУЛЯТОР ДЛЯ РЕЗОНАНСНОГО ОБЪЕКТА, содержащий последовательно соединенные блок выявления направления движения по знакопостоянному сигналу и первый интегратор. Последовательно соединенные второй интегратор, исполнительный , / I «V.4;pvrt, , I .,,. .-- механизм, подключенный выходом к входу резонансного объекта, и последовательно соединенные датчик выходной величины резонансного объекта, и блок выявления направления движения по знакопеременному сигналу, отл ичающийся тем, что, с целью повьЕпения точности регулятора, он содержит сумматор, подключенный первым входом к выходу первого интегратора, вторым входом к выходу блока выявления направления движения по знакопеременному сигналу, а выходом - к входу второго интегратора, и пиковый детектор, подключенный входом к выходу j датчика выходной величины резонансного объекта, а выходом - к входу (Л блока выявления направления движения по знaкoпocтoяннolv y сигналу. оэ СП сд а: 4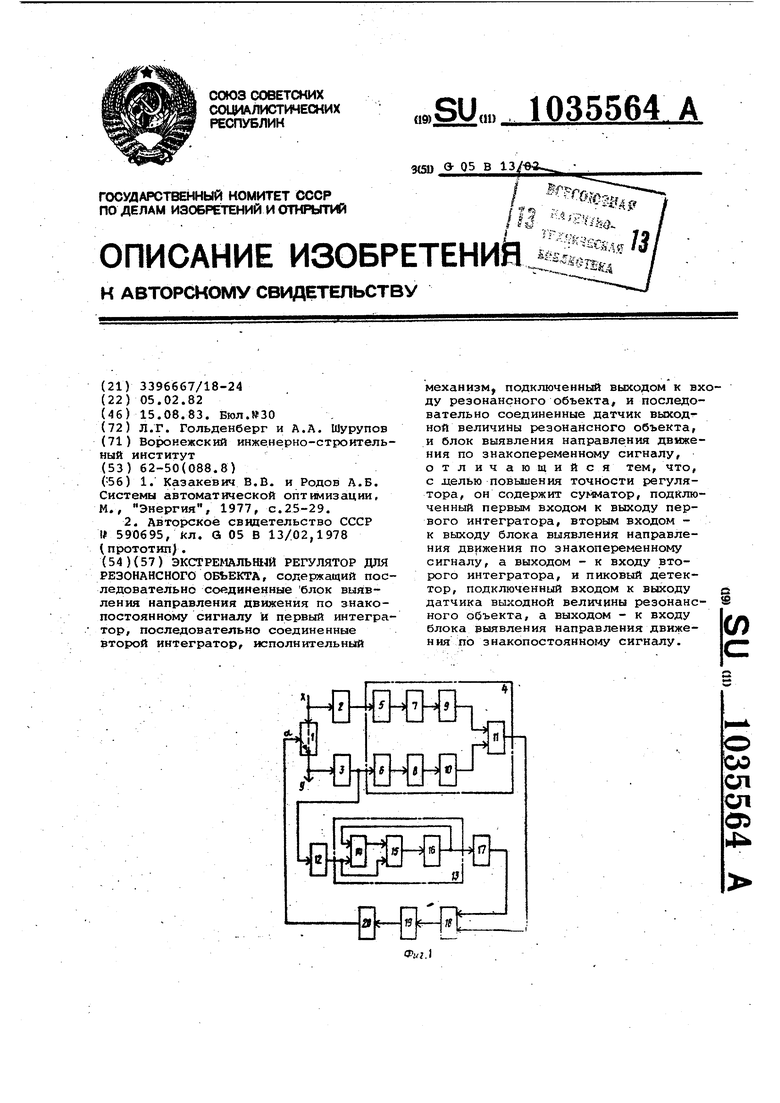
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Казакевич В.В | |||
| и Родов А.Б | |||
| Системы автоматической оптимизации, М., Энергия, 1977, с.25-29 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Экстремальный регулятор для резонансного объекта | 1975 |
|
SU590695A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
