1
Предлагаемый экстремальный регулятор предназначен для использования в системах автоматического управления резонансными объектами (вибрационными машинами различного назначения, RLC-контурами и т. д).
Известны экстремальные регуляторы, используемые для выявления и поддержания экстремума в объектах, обладающих экстремальной статической характеристикой, дрейфующей при изменении внутренних и внешних возмущений, поступающих на объект 1, 2.
Из известных экстремальных регуляторов наиболее близким по технической сущности является регулятор, содержащий датчик управляющего воздействия, датчик управляемой величины, два пороговых устройства, два дифференциатора, триггер, выход которого через интегратор соединен с исполнительным механизмом 3. Применение в схеме регулятора указанных элементов обусловлено особенностью резонансных объектов - однозначной зависимостью между амплитудными характеристиками объекта, имеющими экстремум (резонансный режим) и его фазовыми характеристиками, изменяющимися монотонно, а также использованием последних для выявления и поддержания экстремума. При этом резонансному режиму соответствует некоторый характерный угол фазового сдвига между управляющим воздействием и управляемой
величиной, определяемый их выбором, а дорезонансному и зарезонансному режимам - углы фазового сдвига, соответственно, меньщие или большие характерного угла. Для больщинства резонансных объектов, применяемых в технике (вибрационные мащины, RLC-контуры), использование их полезных свойств достигается при таком выборе управляющего воздействия и управляемой величины, когда характерный угол равен л/2. Использование же фазовых характеристик объекта позволяет выявлять и поддерл ивать экстремум более простыми техническими средствами.
Датчики управляющего воздействия и управляемой величины преобразовывают сигналы, поступающие с объекта, в сигналы, имеющие одинаковую физическую природу, необходимую для выявления угла их фазового
сдвига. Выявителем угла фазового сдвига является триггер, на который поступают сигналы с датчиков через пороговые устройства и дифференциаторы. Дорезонансному режиму соответствует одно устойчивое состояние триггера, зарезонансному - другое. Сигнал с выхода триггера через интегратор поступает на исполнительный механизм, который оказывает регулирующее воздействие на объект, направляя управляемую величину в сторону экстремума.
Недостатком известных устройств является то обстоятельство, что при выявлении экстремума скорость изменения регулирующего воздействия является постоянной независимо от того, на каком расстоянии от экстремальной точки находится объект. Для улучшения же динамики экстремального регулирования, в частности, уменьшения потерь на рыскание в окрестности экстремума, необходимо, чтобы при приближении к экстремуму скорость изменения регулирующего воздействия уменьшалась.
Целью настоящего изобретения является повышение точности регулятора.
Поставленная цель достигается тем, что в регуляторе установлены два выпрямителя, причем датчик управляющего воздействия через последовательно соединенные первое пороговое устройство, первый дифференциатор и первый выпрямитель соединен с первым входом триггера, а датчик управляемой величины через последовательно соединенные второе пороговое устройство, второй дифференциатор и второй выпрямитель соединен со вторым входом триггера.
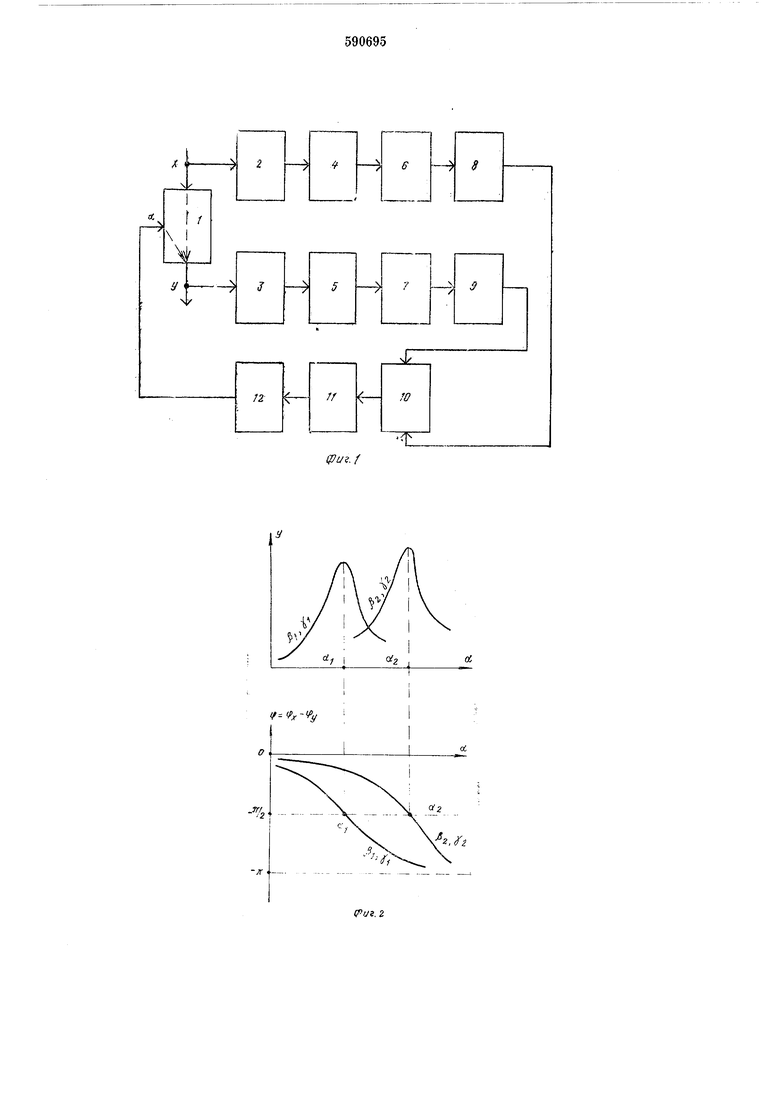
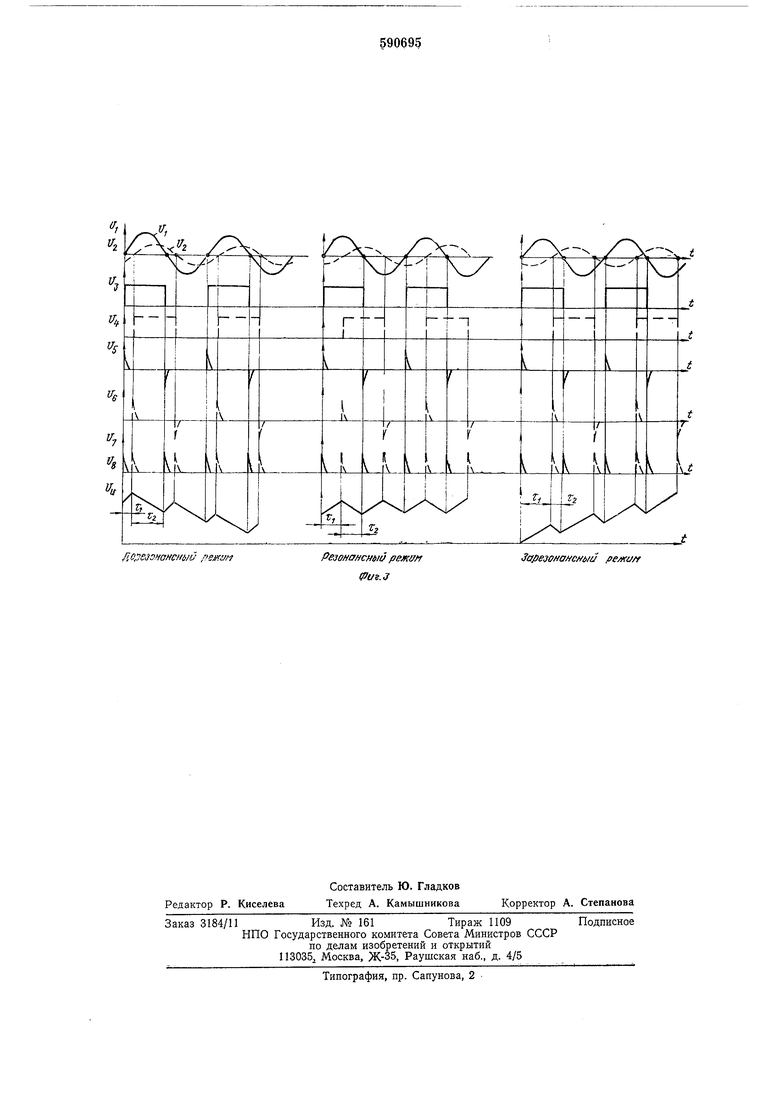
На фиг. 1 изображена блок-схема регулятора; на фиг. 2 - характеристики, иллюстрирующие особенности резонансного объекта; на фиг, 3 - эпюры напрян ений, поясняющие работу экстремального регулятора.
Блок-схема содержит резонансный объект 1, датчик управляющего воздействия 2, датчик управляемой величины 3, первое п второе пороговые устройства 4, 5; первый и второй дифференциаторы 6 и 7; первый и второй выпрямители 8, 9, триггер 10, интегратор II, исполнительный механизм 12, х - управляющее воздействие, поступающее на резонансный объект, у - управляемая величина объекта, а - регулирующее воздействие, фх - фаза управляющего воздействия; фу - фаза уп.равляемой величины; ф - угол фазового сдвига между л: и у; ai и а2 - значения регулирующего воздействия, при которых достигается экстремум и при которых угол фазового сдвига равен я/2, р, ь р2, Т2 - возмущающие воздействия, вызывающие смещение экстремальной характеристики объекта (смещение экстремзма); t/2 и f/s - сигналы на выходе датчиков управляющего воздействия и управляемой величины; t/4 и f/5 - сигналы на выходе пороговых устройств; f/6 и L - сигналы на выходе дифференциаторов; Us и Ug - сигналы на выходе выпрямителей, поступающие на первый и второй входы триггера (сплошными линиями показаны сигналы на выходе одного выпрямителя, пунктирными - на -выходе другого); Uii - сигнал на выходе интегратора; TI - длительность нахождения триггера в одном устойчивом состоянии; т: - длительность нахождения триггера в другом устойчивом состоянии, t - время.
Экстремальный регулятор для резонансного объекта функционирует следующим образом. В резонансном объекте 1 (фиг. 1) выделяют
канал с экстремальной характеристикой, максимум или минимум которой необходимо выявлять и поддерживать, и канал с монотонной характеристикой, положение отдельных точек на которой определенным образом связано с положением отдельных точек на экстремальной характеристике.
Входом канала с экстремальной характеристикой является регулирующее воздействие а, выходом - управляемая величина у. Входом канала с монотонной характеристикой является то же регулирующее воздействие а, а выходом- угол фазового сдвига ф фж-ф,/ между управляющим воздействием х и управляемой величиной у.
Экстремальный регулятор использует характерное свойство резонансных объектов, состоящее в том, что при определенном выборе управляющего воздействия и управляемой величины точке экстремума управляемой величины соответствует угол фазового сдвига ф Фэ:-Фу между ними, равный я/2, а дорезонансному и зарезонансному режимам соответствуют углы фазового сдвига, меньшие я/2 и большие я/2 (фиг. 2, кривые I и II). При изменении некоторых возмущающих воздействий р и 7 происходит смещение экстремума, однако его новому положению вновь будет соответствовать фазового сдвига, равный я/2, а дорезонансному и зарезонансному режимам вновь будут соответствовать углы фазового сдвига, меньшие я/2 и большие я/2 (фиг. 2; кривые III и IV). Следовательно, выявление экстремума эквивалентно выявлению угла фазового сдвига, равного я/2.
Входящие в экстремальный регулятор датчики 2 и 3 линейно преобразовывают сигналы л: и г/ в сигналы Vz и U, имеющие одинаковую физическую природу.
Пусть, например, f/2 и t/з изменяются по гармоническому закону, хотя в общем случае это условие не является обязательным. Пороговые устройства 4 и 5 преобразовывают t/2 и Uz в последовательности однополярных прямоугольных импульсов Us и U, длительности которых составляют половину периодов сигналов f/2 и f/3 и фазовый сдвиг между которыми равен фазовому сдвигу ф Дифференциаторами 6 и 7 прямоугольные импульсы f/4 и t/5 преобразовываются в двухполярные последовательности узких импульсов f/6 и U, которые выпрямителями 8 и 9 вновь преобразуются в однополярные последовательности импульсов f/8 и Ug, поступающие на входы триггера 10, имеющего два устойчивых состояния.
В заявляемом регуляторе взаимное временное расположение импульсов С/в и Ug является признаком, выявляющим экстремум, поскольку фазовый сдвиг, равный я/2, соответствует такому расположению импульсов t/g по отношению к импульсам U, при котором импульсы и и t/9 чередуются через равные промежутки времени. В дорезонансном и зарезонансном режимах чередование импульсов f/sH
UQ происходит через иеравные промежутки времени.
Переключеиие триггера 10 импульсами Uz и f/9, поступающими на его входы, и последующее интегрирование выходных сигналов триггера (на фиг. 3 не показаны), имеющих форму прямоугольных импульсов, длительность которых и между которыми соответствуют промежуткам времени между поступлением импульсов Us и f/9. осуществляется интегратором И, который рещает две задачи:
а)обеспечивает движение объекта из дорезонансиого и запезонансттого режимов к резонансному (т. е. к экстремуму);
б)обеспечивает уменьшение скорости изменения регулирующего воздействия при приближении к резонансному режиму. Изменение регулирующего воздействия осуществляется исполнительным механизмом 12.
В отдельных режимах работа экстремального регулятора осуществляется следующим образом:
а)дорезонансный режим.
Фазовый сдвиг между сигналаА1и /2 и Г/з меньще я/2 и, следовательно, длительность TI нахождения триггера в одном из устойчивых состояний бЗдет меньще длительности t2 нахождения триггера в другом устойчивом состоянии (переброс триггера осуществляется импульсами, поочередно поступающими на его входы). При этом на выходе интегратора возникает «скользяи1ий режим, т. е. в течение времени TI сигнал t/n будет возрастать, а в течение времени Тз убывать. Так как , «в среднем сигнал U будет убывать, что приведет к движению дополнительного механизма в направлении, перемещающем объект в сторону экстремума.
б)Резонансный режим.
Фазовый сдвиг между сигналами U и f/з равен п/2 и, следовательно, длительности TI и Т2 нахождения триггера в каждом нз устойчивых состояний одинаковы. Сигнал f/и на выходе интегратора будет возрастать и убывать на одинаковую величину, что соответствует автоколебательному движению системы в окрестности экстремума.
в)Зарезонансный режим.
Фазовый сдвиг между сигналами U и f/з больще л/2 и, следовательно, длительность TI нахождения триггера в одном состоянии больше длительности Та нахождения в другом состоянии. Так как TI Т2, «в среднем сигнал f/ii будет возрастать, что приведет к движению исполнительного механизма в направлении, противоположном направлению при дорезонансном режиме, т. е. онять-таки в сторону экстремума.
Особенностью экстремального регулятора является возможность повыщения точности и качества экстремального регулирования. Чем ближе находится система к экстремуму, тем меньще различие в длительностях TI и Т2 нахождения триггера в каждом из устойчивых состояний и, следовательно, тем меньще «средняя скорость изменения сигнала t/,i на выходе интегратора. Уменьщение же скорости изменения регулирующего воздействня при подходе к экстремуму способствует уменьщению потерь на рыскание в окрестности экстремума.
Использование новых элементов-выпрямителей выгодно отличает предлагаемый экстремальный регулятор от известных устройств. В зависимости от инерционных свойств объекта потери на рыскание уменьщаются в 1,5- 2,5 раза, т. е. существенно новыщается точность поддержания экстремального режима. Учитывая, что потери на рыскание являются фактором, нрепятствующим применению экстремальных регуляторов на многих технологических объектах, -казанное обстоятельство позволяет также расщирить сферу применения экстремальных рег 1яторов.
Формула изобретения
30
Экстремальный регулятор для резонансного объекта, содержан1ий датчик управляющего воздействия, датчик управляемой величины,
два пороговых устройства, два дифференциатора, триггер, выход которого через интегратор соединен с исполнительиым механизмом, отличающийся тем, что, с целью повыщения точности регулятора, в нем установлены
два выпрямителя, причем датчик управляющего воздействия через последовательно соединенные первое пороговое устройство, первый дифференциатор и первый выпрямитель соединен с первым входом триггера, а датчик
управляемой величины через последовательно соединенные второе пороговое устройство, второй дифференциатор и второй выпрямитель соединен со вторым входом триггера. Источники информации,
принятые во внимание при экспертизе
1.Либерзон Л. М. и др. Системы экстремального регулирования. М., «Энергия, 1965, стр. 7-41.
2.Теория автоматического управления. Под ред. А. В. Нетущнла. ч. 1. М., «Высщая щкола, 1968, стр. 23, 84-86.
3.Самонастраивающиеся системы. Под ред. П. И. Чинаева. Киев, «Наукова Думка, 1969. стр. 30-34.
Дсуезонанснб/} flenfai-j
Pe oHOHCHtiiJ режу ft -X. У
yapeiOHOHCf/t/iJ fleжuff (Риг.з .
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор для резонансного объекта | 1982 |
|
SU1035564A1 |
| Экстремальный регулятор для резонансногоОб'ЕКТА | 1979 |
|
SU798705A1 |
| Экстремальный регулятор для резонансного объекта | 1981 |
|
SU979306A1 |
| Экстремальный регулятор для резонансного объекта | 1987 |
|
SU1413598A1 |
| Устройство для управления резонансным объектом | 1979 |
|
SU781780A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Смеситель для сыпучих материалов | 1989 |
|
SU1726000A1 |
| Устройство для измерения резонансной частоты элементов конструкций | 1989 |
|
SU1832183A1 |
| Устройство для регулирования частоты колебаний платформы | 1978 |
|
SU752254A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |