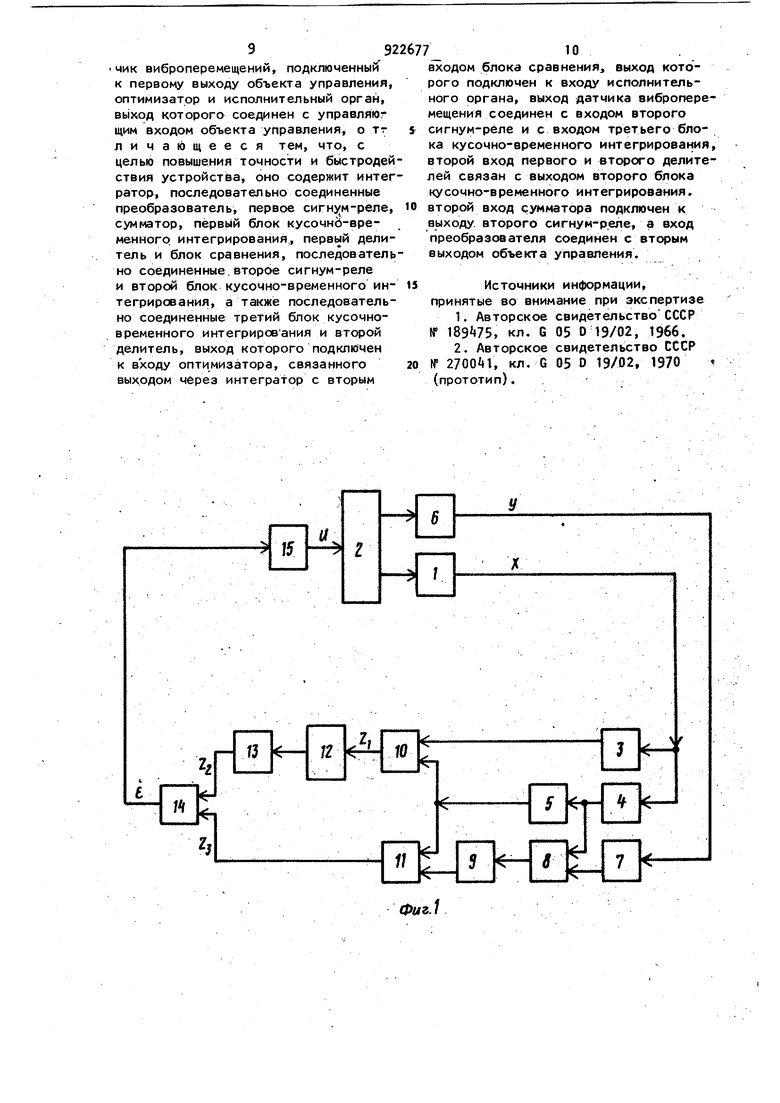
1 . , - . Изобретение относится к управлению механическими колебаниями и пред назначено для использования в системах автоматического управления вибра ционными машинами технологического назначения. Известно устройство автоматическо го управления, в котором дЛя обеспеч ния оптимального режима вибрации, пр котором амплитуда виброперемещения рабочего органа вибромашины достигает максимума, используется стабилизация разности фаз между сигналамй с датчиков, подключенных к двум выходам объекта управления. Датчик виброперемещения, подключенный к первому выходу объекта, преЬбразует в электрический сигнал виброперемещение рабочего органа вибромашины. Датчик опорного сигнала, подключенный ко вто рому выходу объекта, преобразует в электрический сигнал угол поворота дебаланса вибратора l . Недостаток известного устройства необходимость в ручной настройке датчика опорного сигнала и невозможность поддержания экстремума при увеличении демпфирования объекта, так как разность фаз соответствующая экстремуму, при этом изменяется. Наиболее близким техническим решением является устройство, содержащее датчик виброперемещения, генератор управляемой частоты, схему усреднения, усилители, автоматический оптимизатор, реализующий поиск с запоминанием экстремума и выполненный в виде блока запоминания и вычисления с логическим элементом, блок форсированного выхода на экстремум и исполнительное устройство 2 . Недостатком этого устройства является низкая точность поддержания максимума амплитуды виброперемещения, и относительна большое время его поиска. Это объясняется динамической погрешностью, вносимой схемой усреднения при преобразовании знакопеременного сигнала виброперемещения в знакопостоянный пропорциональный ег амплитуде сигнал, поступающий на вход автоматического оптимизатора и ограниченностью скорости изменени управляющего воздействия, вызываемо колебательным характером изменения амплитуды виброперемещения при непо редственном изменении управляющего воздействия. Цель изобретения - повышение точ ности и быстродействия устройства. Поставленная цель достигается те . что в устройство, содержащее датчик виброперемещений, подключенный к первому выходу объекта управления, оптимизатор и исполнительный орган, .въ1ход которого соединен с управляющим входом объекта управления, введ ны интегратор, последовательно соединенные преобразователь, первое сигнум-реле, сумматор, первый блок кусочно-време нного интегрирования, первый делитель и блок сравнения, последовательно соединенные второе сигнум-реле и второй блок кусочновременного интегрирования, а также последовательно соединенные третий блок кусочно-временного интегрирования и второй делитель, выход которого подключен к входу оптимизатора, связанного выходом через интегратор с вторым входом блока сравнения, выход которого подключен к входу исполнительного органа, выход датчика виброперемещения соединен с входом второго сигнум-реле и с входом третьего блока кусочно-временного интегрирования, второй вход первого и второго делителей связан с выходом второго блока кусочно-временного интегрирования, i второй вход сумматора подключен к выходу второго сигнумреле, а вход преобразователя соединен с вторым выходом объекта управле ния. На фиг. 1 изображена блок-схема устройства; на фиг. 2 - временные диаграммы сигналов, поясняющие работу устройства. Блок -схема содержит датчик виброперемещений 1, объект 2 управления (за объект управления принимается вибромашина вместе с источником возбуждающих воздействий), третий блок кусочно-временного-интегрирования, , второе сигнум-реле t, второй блок 5 кусомно-временнаго интегрирования. преобразователь 6, первое сигнум-реле 7, сумматор 8, первый блок 9 кусочно-временного интегрирования,. второй делитель 10, первый делитель 11, оптимизатор 12, интегратор 13, блок сравнения 14, исполнительный орган 15Блоки 6, 7, 8, 9, Т1, и 15 входят в контур регулирования разности фаз, блоки 3, 10, 12 и 13 в контур автоматической оптимизации. Блоки 1 , t и 5 являются общими для обоих контуров. На фиг. 1 и 2 обозначено; X - сигнал виброперемещения, У - опорный сигнал, Zi - выходной сигнал второго делителя 10, Zj - выходной сигнал первого делителя 1Г, - рассогласование, и - управляющее воздействие, Т - полупериод колебаний, интервал времени ненулевого сигнала на выходе сумматора 8, интервал времени нулевого сигнала на выходе сумматора 8, t - время. Масштаб по оси времени на фиг.2а намного меньше Macmta6a времени по оси t на фиг. 26. Устройство работает следующим образом. Датчик виброперемещения 1, подключеннь|й к первому выходу объекта, т.е. установленный на вибрирующем рабочем органе вибромашины, преобразует величину вибррперемещения в сигнал X, который поступает одновременно на вхсГд третьего блока 3 кусочно-временного интегрирования и на вход сигнум-реле 4. Блок кусочно-временного интегрирования преобразует знакопеременный входной сигнал в знакопостоянный ступенчатый сигнал, величина которого неизменна на интервале интегрирования и пропорциональна абсолютной величине интеграла от входного сигнала на предшествующий интервал интегрирования. Блок кусочно-временного интегрирования состоит из двух интеграторов со сбросом. Входной сигнал поочередно подключается к каждому из интеграторов, выходы которых поочередно подключаются к выходу блока. Интервалы интегрирования всех трех блоков 3, 9 и 5 кусочно-временного интегрирования совпадают с интервалами знакопостоянства сигнала виброперемещения X. Таким образом, на выходе третьего блока кусочно-временного интегрирования 3 формируется сигнал, пропорциональныи амплитуде основной гармоники виброперемещения и полупериоду колебаний Т . Сигнум-реле j преобразует входной сигнал в последовательность разнополярных импульсов одинаковой величины, поступающих на вход блока 5. Так как амплитуда входногоi сигнала постоянна, то на выходе блока 5 образуется знакопостоянный сигнал,„ пропорциональный лишь величине Т. Преобразователь 6, подключенный к второму выходу объекта (к источнику возбуждающих воздействий) , , преобразует в сигнал У той же частоты, что и частота сигнала X угол поворота дебаланса, в случае дебалан ного вибратора, или питающее напряже ние, в случае электромагнитного вибратора. Для функционирования устройства необходимо чтобы разность фаз между сигналами X и У однозначно соответствовала амплитуде виброперемещения. Сигнал У поступает на вход первого сигнум-реле, преобразующее его в последовательность разнопол-ярных импульсов. Разнополярные импуль сы .равной величины и сдвинутые на ве личину разности фаз У между сигнала ми X и У с выходов сигнум-реле 4 и 7 поступают на сумматор 8. Выходной сигнал сумматора 8 при несовпадении входных сигналов равен нулю, а при совпадении - удвоенному сигналу. Вре мя t 1- ненулевого сигнала на выход сумматора 8 и время tj,- нулевого сигнала зависят от частоты сигналов X и У и их разности фаз У у При разности фаз равной нулю время ра но Т , а время Хг. равно нулю. При разности фаз равной У равно tj. и Т/г. . Если же разность фаз У мен ше ЗГ/а. (фиг. 2а,), то t больше f .Таким стразом, выходной сигнал сумматора 8 преобразуется блоком кусочно-временного интегрирования 9 в знакопостоянный ступенчатый сигнал,, пропорциональный разности фаз между сигналами X и У и величине полупериода колебаний Т . Выходной сигнал делителя прямо пропорционален величине сигнала, поступающего на его первый вход, и обратно пропорционален величине сигнала,, поступающего на его второй вход. Второй делитель 10 преобразует поступающие сигналы в сигнал -2 пропорциональный лишь амплитуде основной гармоники виброперемещения. Первый делитель 11 преобразует входные 9 7 сигналы в сигнал Zj,пропорциональный величине разности фаз .между сигналами X и У. Автоматический оптимизатор 12 реализует поиск с запоминанием экстремума, осуществляя скачкообразные изменениявыходного сигнала, Поступающего на вход интегратора 13 В зависимости от знака входного сигнала интегратор 13 формирует на выходе линейно возрастающий или линейно убывающий сигнал 2, поступающий на второй вход блока И сравнения, выходной сигнал которого $. равен разности между сигналом, поступающим на второй вход, и сигналом, поступающим на первый вход, б Zt зРассогласование б воздействует на исполнительный орган 15, связанный с объектом 2 и сводящий посредством изменения управляющего воздействия U рассогласование с к нулю. Предположим, что в начальный момент времени выходной сигнал оптимизатора 12 таков, что сигнал Zj возрастает (фиг.2б) и что отрабатывание рассогласования & приводит убыванию управляющего воздействия U, а выходной сигнал Z. второго делителя 10, пропорциональный амплитуде виброперемещения, возрастает. Выходной сигнал первого делителя 11 при этом отслеживает изменение выходного сигнала 2 интегратора 13. Как только изменяясь сигнал 2 пройдет через экстремум и уменьшится на величину к зоны нечувствительности оптимизатора 12, последний сработает и изменит знак выходного сигнала, что вызовет изменение в противоположную сторону выходного сигнала Zj интегратора 13, Возникает автоколебательный режим в зоне максимума амплитуды виброперемещения (фиг. 26) .. Если же в начальный момент направ-. ление изменения сигнала не соответствует движению к экстремуму, то после уменьшения сигнала на величину ь сработает оптимизатор 12 и изменит направление движения. Сигнал виброперемещения X и опорный сигнал преобразователя У на фиг. 2а изображены достаточно близкими к гармоническим,, однако для работы устройства это условие не является обязательным, так как показателем оптимальности является амплитуда основной гармоники виброперемещения i Достаточно того, чтобы частота переходов через нуль сигналов X и У была 79 равна двойной частоте основной гармо НИКИ.. Выходной сигнал 2 интегратора 13 является входным сигналом контура ре гулирования разности фаз,который по воляет реализовать возможные неустой чивые участки экстремальной зависимос ти амплитуды виброперемещения от управляющего воздействия, имеющие место при нелинейных упругих связях или при ограниченной мощности источника возбуждения и обеспечивает апериодическое изменение амплитуды вибропере мещения при скачке входного сигнала, что позволяет повысить скорость, поиска. Динамическая погрешность, вносимая преобразованием знакопеременного сигнала виброперемещения сводитея к минимуму за счет интегрирования сигна ла на полупериоде колебаний. Сигнал, пропорциональный амплитуде кoлeбaнийj запаздывает лишь на время Т. Таким образом, применение в качестве преобразователя знакопеременного сигнала в знакопостоянный пропорциональный амплитуде колебаний сигнал блока кусочно-временного ин- тегрирования и использование в качест ве формирователя управляющего воздействия контура регулирования разности фаз обеспечивает повышение точности поддержания максимума амплитуды виброперемещения и сокращаетвремя его поиска. Динамика объекта оптимизации в устройстве определяется уравнением y(t) ftu(t)3 V,(p) Wt (Р) где У -сигнал огибающей виброперемещения, т.е. пропорциональный амплитуде сигнал; U - управляющее воздействие, f(и) - статическая экстремальная характеристика oбъeкta, W - передаточная функция линейной части объекта , W - передаточная функция преобразователя знакопеременного сигнала в пропорциональный его амплитуде знакопостоянный сигнал. Предположим, что статические характеристики объектов оптимизации в обоих случаях одинаковы и равны t - klU, где t и k - постоянные .объектов. В известном устройстве T Atz:PM (Р) В предлагаемом устройстве , W,( 7 Ть Ti, Т/, где - постоянные времени объектов, , - постоянная времени схемы усреднения, Т - полупериод колебаний. Учитывая, что , Тг. . Т Т , запаздыв.йнием на время . Г можно пренебречь. Тогда для предлагаемого устройства W, (Р) . Пусть Т Tg О Потери на поиск, характер.изующие точность в известном устройстве, уменьшаются при уменьшении Т, , а при замене - на V, что обеспечивается использованием в качестве преобразователя знакопеременного сигнала в пропорциональный амплитуде колебаний сигнал блока кусочно-временного интегрирования, становятся минимальными и равными д/2. Точность поддержания максимума повышается в среднем на 20-30. При нулевых начальных условиях р известном устройстве при измене: ии управляющего воздействия со С- и при W. 1 выходной сигнал ъекта определяется из уравнения У( о xti SmiO(t-t) + Co5u)()adr, W Увеличение с приводит к одновременному повышению скорости возрастающей составляющей и к увеличению колебательной составляющей сигнала У. f|p амплитуде колебательной составляющей, превышающей i /2, возникают ложные реверсы оптимизатора, нарушающие устойчивый режим поиска, что ограничивает его скорость. Выходной сигнал объекта оптимизации при наличии контура регулирова,ия разности фаз для предлагаемого устройства при той же скорости изменения уп эавляющего воздействия опре- . деляется так: y(t) -ТцСе т - 1) и не содержит колебательной составляющей, а следовательно,, не накладывает дополнительных ограничений на увеличение скорости поиска. В среднем время поиска сокращается в 1,5 2 раза Формула изобретения Устройство для управления амплитуДОЙ виброперемещений, содержащее дат чик виброперемещений, подключенный к первому выходу объекта управления, оптимизатор и исполнительный орган, выход которого соединен с управляюг щим входом объекта управления, о тг личающееся тем, что, с целью повышения точности и быстродействия устройства, оно содержит интегратор, последовательно соединенные преобразователь, первое сигн)(м-реле, сумматор, первый блок кусочнЙ-временного интегрирования, первый делитель и блок сравнения, последовательно соединенные,второе сигнум-реле и второй блок кусочно-временного интегрирования, а также последовательно соединенные третий блок кусочновременного интегрирования и второй делитель, выход которого подключен к входу оптимизатора, связанного выходом через интегратор с вторым
входом блока сравнения выход которого подключен к входу исполнительного органа, выход датчика виброперемещения соединен с входом второго сигнум-реле и с входом третьего блока кусочно-временного интегрирования, второй вход первого и второго делителей связан с выходом второго блока кусочно-временного интегрирования, второй вход сумматора подключен к выходу второго сигнум-р.еле, а вход преобразователя соединен с вторым выходом объекта управления.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельствоСССР № , кл. G 05 О 19/02, 1966.
2.Авторское свидетельство СССР № , кл. G 05 О 19/02, 1970
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ДЛЯ УПРАВЛЕНИЯ СЕПАРАТОРОМ | 1970 |
|
SU282046A1 |
| Экстремальный регулятор для резонансного объекта | 1982 |
|
SU1035564A1 |
| Пневматический двухканальный оптимизатор | 1974 |
|
SU526858A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
| Устройство для поиска экстремума | 1983 |
|
SU1091119A1 |
| Экстремальная система управления | 1984 |
|
SU1241191A1 |
| Пневматический самонастраивающийся регулятор | 1976 |
|
SU590693A1 |
| ПНЕВМАТИЧЕСКИЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР С ПЛАВАЮЩЕЙ СИСТЕМОЙ ОТСЧЕТА | 1968 |
|
SU217496A1 |

