9
е со
а со со
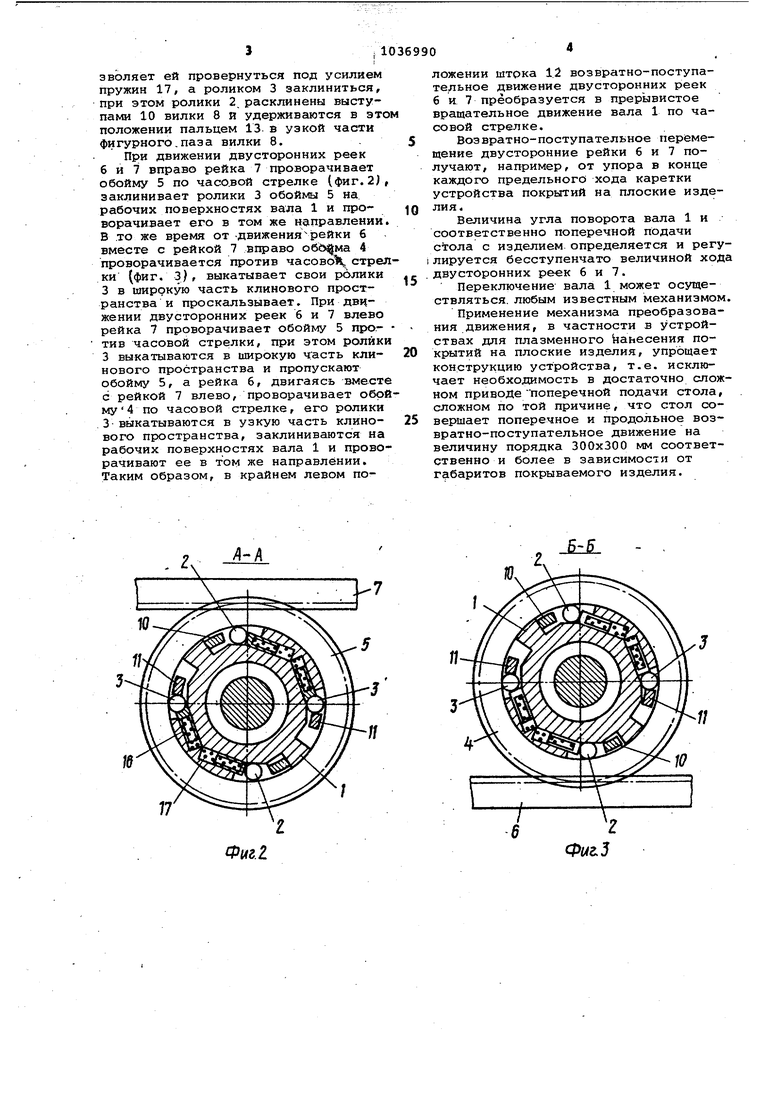
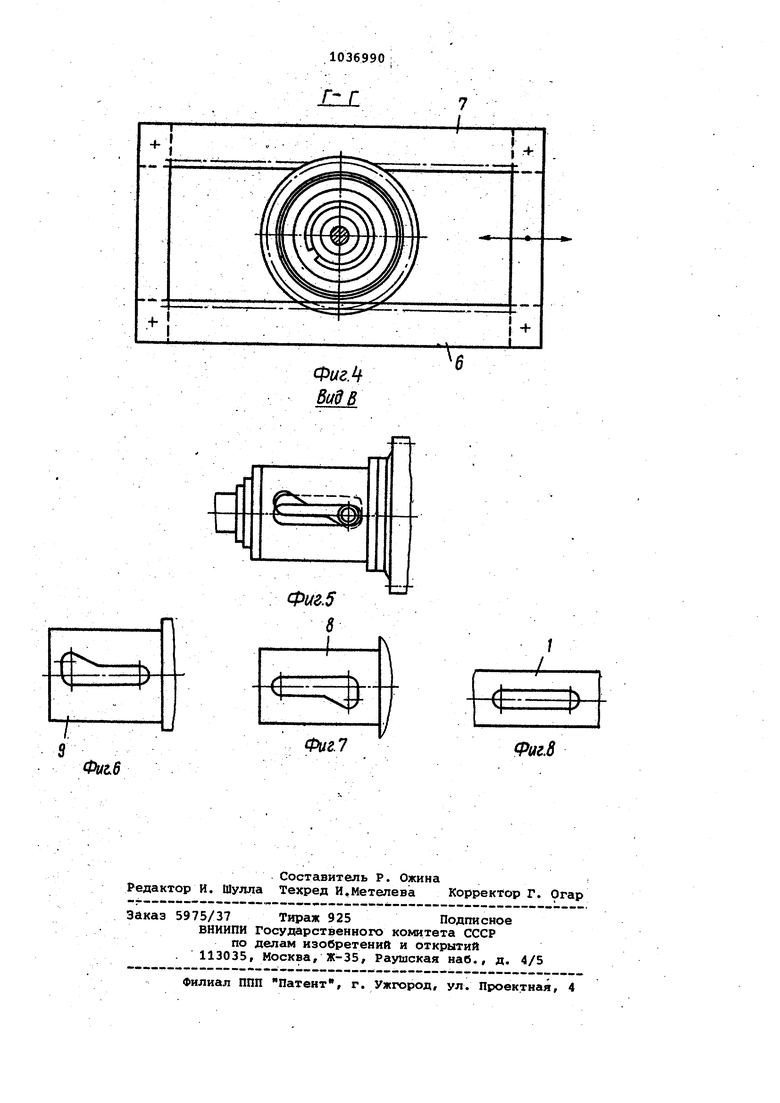
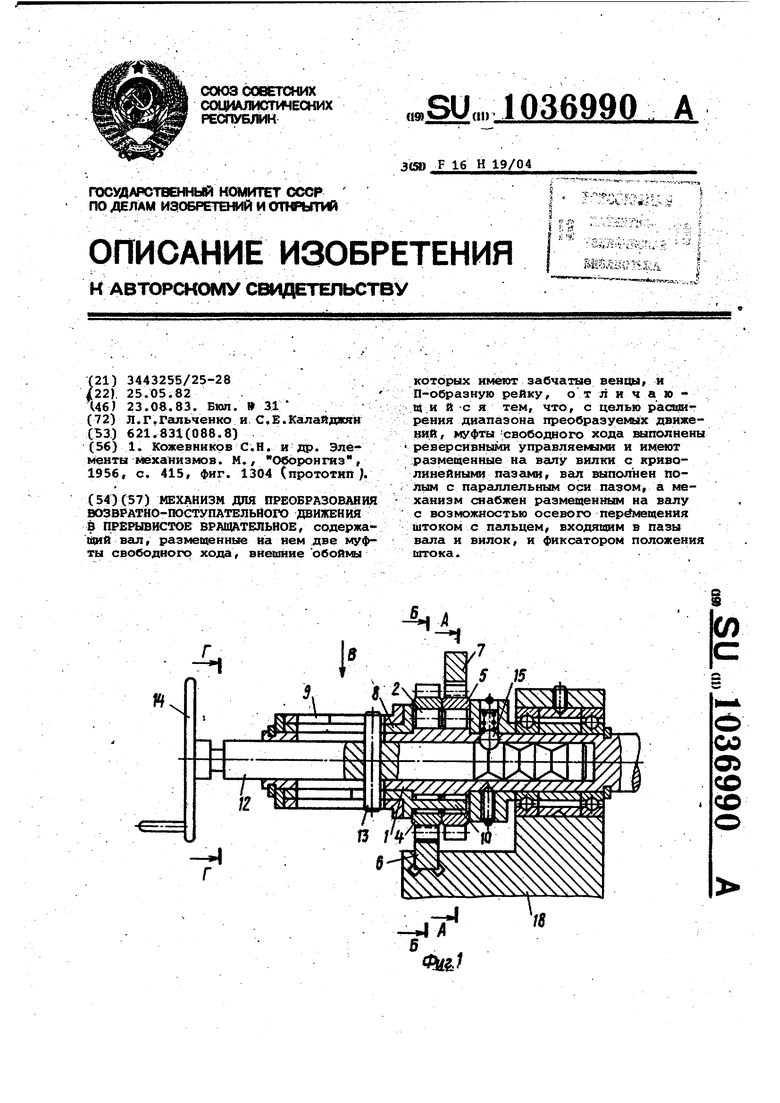
Фи Изобретение относится к мешлино строению, в частности к механическим передачам для преобразования одного вида механического движения в другой и может быть использовано, например в качестве поперечного перемещения стола установки плазменного напылеИзвестен механизм для преобразования возвратно-поступательного движения в прерывистое вращательное, содержащий вал, размещенные в нем две муфты свободного хода, внешние обоймы которых- имеют зубчатые венцы и П-образную рейку, вал выполнен 1, а муфты свободного хода не цельным 1ВНЫ 1. реверсивны Недостатком известного механизма является узкий диапазон преобразуемых движений, обусловленный -отсутствием реверса и управления в муфтах свободного хода. Целью изобретения является расши рение диапазона преобразуемых днижений. Указанная цель достигается тем, что в механизме для преобразования возвратно-поступательного движения в прерывистое вращательное, содержа щем вал,размещенные в нем две муфты с;ВОбодного хода, внешние обоймы которых имеют зубчатые венцы и П-образную рейку, муфты свободного хода выполнены реверсивными управляемыми и имеют размещенные на валу вилки. с криволинейными пазами, вал выполнен полым с параллельным оси пазом, а механизм снабжен размещенным на валу с возможностью осевого перемещения штоком с пальцем, входящим в пазы Всша и вилок, и фиксатором положения штока. .На фиг. 1 изобра1жен механизм, раз рез на фиг. 2 - разрез А-А на фиг.1 на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез Г-Г на фиг. Ij на фиг. 5 - вид В на фиг. 1} на фиг.б фигурный паз вилки 9; на фиг. 7 фигурный паз вилки 8; -на фиг. 8 паз хвостовика звездочки. -Механизм для преобразования возвратно-поступательного движения в прерывистое вращательное содержит вал 1, являющийся одновременно внутренней обоймой муфты свободного хода содержащий ролики 2 и 3, внешние обой мы 4 и 5, выполненные с зубчатыми венцами и защемленные с рейками б и , вилки 8 и 9 снабженные соответственно выступами 10 и 11 и посаженные на хвостовик вала 1, в отверстие которого вставлен шток 12 с пальцем 13, проходящим через паз в хвостовик вала 1 и фигурные пазы вилс-к 8 и 9. Шток 12 снабжен маховиком 14 и фиксатором 15. Ролики 2 и 3 подпружинены плунжером 16 и пружинами 17. Рейки б к 7 соединены между собой и образуют двустороннюю зубчатую рейку (.фиг. 4 перемещающуюся в направляющих, корпуса 18. Вилки 8 и 9 зафиксированы от осевых перемещений, не имеют возможности проворачиваться на хвострвике вала 1 в пределах фигурных пазов. Шток 12 имеет воз можно ст ь перемещаться только в осевом направлении и имеет три фиксированных положения. Маховик 14 предназначен для ручного управдения механизмом. Механизм преобразования возвратнопоступательного движения в прерывистое вращательное работает следующим образом. Когда шток 12 полностью задвинут в крайнее правое положение (фиг. 1} , соответствующее вращению вала 1 (он же является ведомым валом ) в направлении против - часовой стрелки . (фиг. 2 и 3), палец 13 находит- |, . . ся в равширенйой части фигурного паза вилки 8 (фиг. 5) к позволяет ей провернуться под усилием пружин 17, а роликом 2 - заклиниться . При этом ролики 3 расклинены выступами 11 вилки 9 и удерживаются в этом положении пальцем 13 в узкой части фигурного паза вилки 9. В этом положении механизмапри „ движении двусторонних реек 6 и 7 влево ( фиг. 2 ) рейка 7 проворачив ёт против часовой стрелки обойму 5, которая заклинивает свои рблики на рабочих поверхностях вала 1 и проворачивает его в том же-направлении. .В то же время от движения рейки 6 вместе с рейкой 7 влево обойма 4 проворачивается по часовой стрелке (фиг. 3), выкатывает свои ролики 2 в широкую часть клинового пространства и проскальзывает. При движении двусторонних реек 6 и 7 вправо рейка 7 проворачивает обойму 5 (фиг. 2) по часовой стрелке, выкатывает свои ролики в широкую часть клинового просц ранства- и проск-альзывает, а рейка 6, двигаясь вместе с рейкой 7 вправо, проворачивает обойму 4 против часовой стрелки (фиг. 3), заклинивает свои ролики 2 на рабочих поверхностях вала 1 и проворачивает ее в том же направлении. Таким образом, в крайнем правом положении штока 12 возвратно-поступательное движение реек б и 7 преобразуется в прерывистое вращательное движе,ние ведомого вала 1 против часовой стрелки. В среднем положении штока 12 палец 13 будет находиться в узкой части фигурных пазов вилок 8 и 9, при котором выступами 10 и 11 расклинены все ролики 2 и 3, и вал 1 маховиком 14 и пальцем 13 может вращаться в любом направлении. В крайнем левом положении штока 12 палец 13 становится против расширения фигурного паза вилки 9 и позволяет ей провернуться под усилием пружин 17, а роликом 3 заклиниться, при этом ролики 2, расклинены выступами 10 вилки 8 и удерживаются в это положении пальцем 13 в узкой части фигурного.паза вилки 8.
При движении двусторонних реек 6 и 7 вправо рейка 7 проворачивает обойму 5 по часо.вой стрелке (фиг. 2), заклинивает ролики 3 обоймы 5 на. рабочих поверхностях вала 1 и проворачивает его в том же направлении. В то же время от -движения рейки 6 вместе с рейкой 7 вправо 4 проворачивается против часовоХ стрелки (фиг. 3), выкатывает свои ролики 3 в широкую часть клинового пространства и проскальзывает. При движении двусторонних реек 6 и 7 влево рейка 7 проворачивает обойму 5 против часовой стрелки, при этом ролики 3 выкатываются в широкую часть клинового пространства и пропускают обойму 5, а рейка 6, двигаясь вместе с рейкой 7 влево, проворачивает обойму 4 по часовой стрелке, его ролики .3-выкатываются в узкую часть клинового пространства, заклиниваются на рабочих поверхностях вала 1 и проворачивают ее в том же направлении, Таким образом, в крайнем левом положении штока 12 возвратно-поступательное движение двусторонних реек 6 и 7 преобразуется в прерывистое вращательное движение вала 1 по часовой стрелке.
Возвратно-поступательное перемещение двусторонние рейки 6 и 7 получают, например, от упора в конце каждого предельного хода каретки устройства покрытий на плоские изделия.
Величина угла поворота вала 1 и соответственно поперечной подачи стола с изделием определяется и регуj лируется бесступенчато величиной ход двусторонних реек 6 и 7.
Переключение вала 1 может осуществляться, любым известным механизмом
Применение механизма преобразования движения, в частности в устройствах для плазменного Занесения покрытий на плоские изделия, упрощает конструкцию устройства, т.е. исключает необходимость в достаточно сложном приводе поперечной подачи стола, сложном по той причине, что стол совершает поперечное и продольное возвратно-поступательное движение на величину порядка 300x300 мм соответственно и более в зависимости от габаритов покрываемого изделия.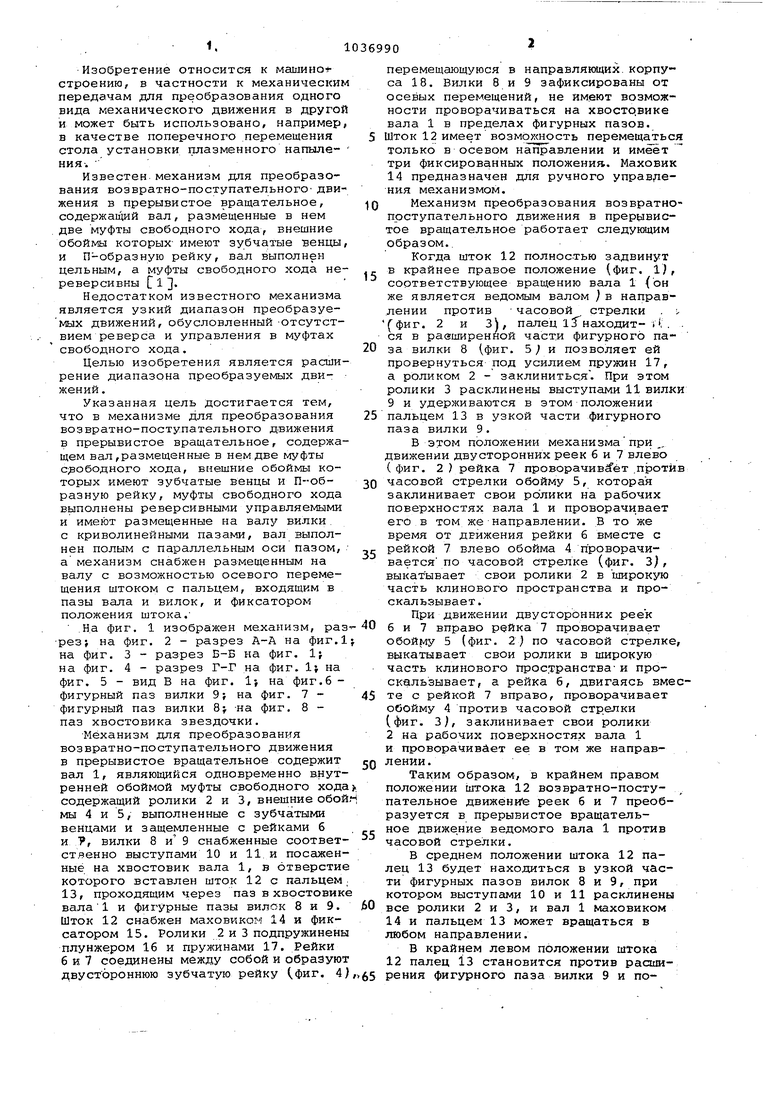
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ производства электрической энергии электромобилем для его движения | 2019 |
|
RU2731591C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОГРЕЙДЕРА | 1997 |
|
RU2133317C1 |
| Механизм сцепления | 1980 |
|
SU985507A1 |
| Привод механизма для соединения-отсоединения труб | 1986 |
|
SU1442633A1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1997 |
|
RU2172841C2 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Механизм для преобразования возвратно-поступательного движения в непрерывное вращательное | 1985 |
|
SU1288406A1 |
| И.-В. Ф. Маленок и И. Б. Покровская | 1970 |
|
SU288506A1 |
| Поршневая машина | 1989 |
|
SU1724897A1 |
| ПАШТУО-ТЕХ1!В-:[С:Г-:' БИБЛИОТЕКЛ f | 1973 |
|
SU369311A1 |
Фиг. 2.
i.
fl
.л
Фиг.5 8
Фиг.7
иг.8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кожевников С.Н | |||
| и др | |||
| Элементы ««еханиэмов | |||
| М., Оборонгяз 1956, с | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО ТАРТАНИЯ | 1915 |
|
SU415A1 |
| Предохранитель от вывинчивания электрических ламп накаливания | 1924 |
|
SU1304A1 |
