Устройство относится к автомати зации производственных процессов, а именно к автоматическому регулированию межклетевых натяжений на непрерывном стане холодной прокатк Известно устройство с с-гемы регулирования межклетевых натяжений в которой исполнительным Механизмом регулирующим натяжения в каждом межклетевом , промежутке прокатного стана, является йажимной механизм последующей по отношению к рассматриваемому промежутку клети. Перемещение нажимного механизма последующей клети вверх приводит к увеличению натяжения в рассматривае перемещение вниз MOM промежуткеj к уменьшению этого натяжения. В со седних межклетевых промежутках натяжения при этом практически не изменяются tl Однако регулирование межклетевых натяжений с воздействием на нажимные механизмы возможно только при достаточном уровне скорости прокатки (выше-3% номинальной скорости ). Это связано с резким умень шением влияния перемещения нажимно го механизма н.а натяжение п-олосы при низких скоростях прокатки. Поэтому на малых скоростях прокатки, близких к нулевым, во избежание ава рий регуляторы натяжения с воздействием на нажимные механизмы отключают и межклетевые натяжения ос. таются неконтролируемыми. Это может привести,к обрывам полосы. Работа прокатного стана на скоростях, близких к нулевым, в том числе нулевой скорости, происходит при остановке итрогании стана с п лосой. Время работы стана в таком режиме составляет заметную долю в общем цикле, поэтому желательно иметь возможность регулирования межклетевых натяжений на скоростях прокатки, близких к нулевой. Наиболее близким к предлагаемому является устройство регулирования межклетевого натяжения, которое включает в себя задатчик и датчик натяжений между любыми.двумя клетями i-1 и 1, выходы которых,подключены к двум входам алгебраического сумматора, выход которого подсоедин к регулятору натяжения покоя, в обратную связь которого подсоединен блок регулир)емой зоны нечувствитель ности, на управляющий вход которого через функциональный преобразовател подсоединен датчик скорости прокатки. Устройство позволяет регулировать межклетевое натяжение не только на скоростях прокатки выше 3% номиналь ной путем воздействия на нажимной механизм последующей клети, но регул ровать и на малых скоростях, изме няя скорость вращения валков предыдущей клети, для чего регулятор натяжения при малой скорости прокатки переключается на вход системы управления скоростью прокатных валков данной клети 2 , Недостатком известного устройства является то, что с одним и тем же регулятором натяжения невозможно обеспечить оптимальное регулирование на высоких и низких скоростях прокатки, так как при переключении изменяется объект регулирования. Поэтому следует предусмотреть специальный- регулятор натяжения - регулятор натяжения покоя, работающий только на малых скоростях,, в том числе при нулевой скорости. В отличие от регулирования натяжения через нажимной механизм регулирование через скорость прокатных валков имеет тот недостаток, что оно не автономно, и при регулировании натяжения в любом 1-1, i межклетевом промежутке путем изменения ско1рости валков 1-1 или 1-ой клети одновременно будет вноситься возмущающее изменение натяжения в соседней с данной клетью промежуток -2, 1-1 или 1, ivl), Таким образом., при регулировании межклетекого натяжения через скорость клетей регуляторы натяжения во всех промежутках оказываются взаимосвязанными, причем работа каждого в отдельности регулятора отрицательно сказывается на работе остальных. Это взаимовлияние не позволяет получить качественное регулирование натяжения на нулевых скоростях прокатки. Цель изобретения- повышение точности поддержания заданных межклетевых натяжений при малых скоростях прокатки. Поставленная цель достигается тем, что в устройстве регулирования межклетевого натяжения на непрерывном стане холодйой прокатки, содержащее задатчик и датчик натяжения мелсду любыми двумя клет.ями, выходы которых подсоединены к двум входам алгебраического сумматора, выход которого подсоединен к регулятору натяжения, покоя, в обратную связь которого подсоедин н блок регулируемой зоны нечувствительности, на управляющий вход которого через функциональный преобразователь,подсоединен датчик скорости прокатки, выход регулятора натяжения покоя подсоединен с входу регулятора тока системы управления рассматриваемой клети и к входу дополнительно введенного блока дифференцирования, выход которого подсоединен, к входам регуляторов скоростей систем управления всех последующих клетей.
На фиг, 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - расчетная схема контура регулирования натяжения покоя между клетями i-1, i с передаточными функциями отдельных звеньев; на фиг, 3 преобразованная структурная схема контура регулирования натяжения между клетямиi-l, i; на фиг. 4 функциональная схема дифференцирования; на фиг. 5 - характеристика вход-выход функционального преобразователя.
Устройство (фиг. 1) включает в себя задатчик 1 и датчик 2 натяжени между клетями 1-1, i, алгебраический сумматор 3, регулятор 4 натяжения покоя, блок 5 регулируемой зоны нечувствительности, функциональный преобразователь.б, датчик 7 скорости прокатки ренулятор 8 тока системы управления i-ой клети, блок 9 дифференцирования и регуляторы 10-12 скорости сех последующих за i-ой клетей. Причем выходы задатчика 1 и датчика 2 натяжения подключены к вдум входам алгебраического сумматора 3, выход которого подсоединен к регулятору 4 натяжения покоя, выход которого в свою очередь подключен к регулятору 8 тока системы управления i-ой клети, в обратную связь регулятора 4 натяжения покоя включен .|блок 5 регулируемой зоны нечувстви тельности, на управляющий вход которого через функциональный преобразователь б подключен датчик 7 скорости прокатки; вход дифференцирующего блока 9 подключен к выходу регулятора 4 натяжения покоя, а его выход - к входу регуляторов скоростей всех последующих за i-ой клетей.
Устройство работает следующим образом.
При малых скоростях прокатки с появлением отклонения натяжения между клетями i-l и i от заданного на Bs-аходе алгебраического сумматора появляется напряжение, пропорциональное ошибке, которое преобразуется соответствующим образом в пи-регуляторе натяжения покоя ив качестве задания тока (момента ) поступает на вход регулятора тока i-ой клети. Прокатные валки поворачиваются на определенный угол 4;j и натягивают полосу в промежутке i-l, i, устраняя возникшее отклонение натяжения в данном промежутке. После этого сигнал ошибки становится равным нулю, а на выходе регулятора покоя сохраняется напряжение, равное интегралу от ошибки, величина которого определяет натя жение полосы в промежутке. ., Для того, чтобы поворот валков i-ой клети на угол не вызывал
изменения натяжения в промежутке между клетями i, i-l необходимо валки i -1 клети повернуть на угол Ч. , а чтобы исключить изменение натяжения в промежутке i- 1, i- 2 от поворота i-l клети, надо повнуть валки i - 2 клети все на тот же угол 4 i Таким образом, поворот всех последующих за i-ой клетей на угол .Ч, обеспечит и вариантность натяжений во всех последующих за i - 1, i межклетевых промежутках. Построение регуляторов натяжения покоя во всех межклетевых промежутках по такой структуре обеспечивает автономность регулирования, уст|раняет их взаимовлияние, позволяет су1цественно увеличить быстродействи каждого. регулятора в отдельности и тем самым повысить точность поддежания заданных межклетевых натяжений на скоростях прокатки, близких к нулевой.
Необходимую информацию о величине угла поворота i-ой клети можно получить из выходного сигнала регулятора натяжения покоя, i- 1, i промежутка, преобразовав его соотвествующим образом в блоке дифференцирования. Подав этот сигнал на регуляторы скорости всех последующих за i-ой клетей, можно одно&ременно повернуть прокатные валки всех клетей на угол Ч,-. Определим, какой должна быть для этого передаточная функция блока дифференциарования.
На фиг. 2 изображен регулятор 4 натяжения покоя, контур тока (КТ) системы регулирования привода валков i-ой клети с постоянной времени Тпропорциональный регулятор
т
скорости (РС ) привода валков i-ой клети с коэффициентом электт механическая постоянная времени (Тд,) приводного электродвигателя; постоянная интегрирования (Тц., связывающая скорость uj. и угол поворота валков ) передаточный коэффициент
К.
величина
. , гзслимииа которого заВИСИТ
от упругости полосы и межклетевого расстояния, связывает угол поворота валков i-ой клети с межклетевым натяжением полосы , ., коэффициент нагрузки (К Ь датчик 2 натяжения..
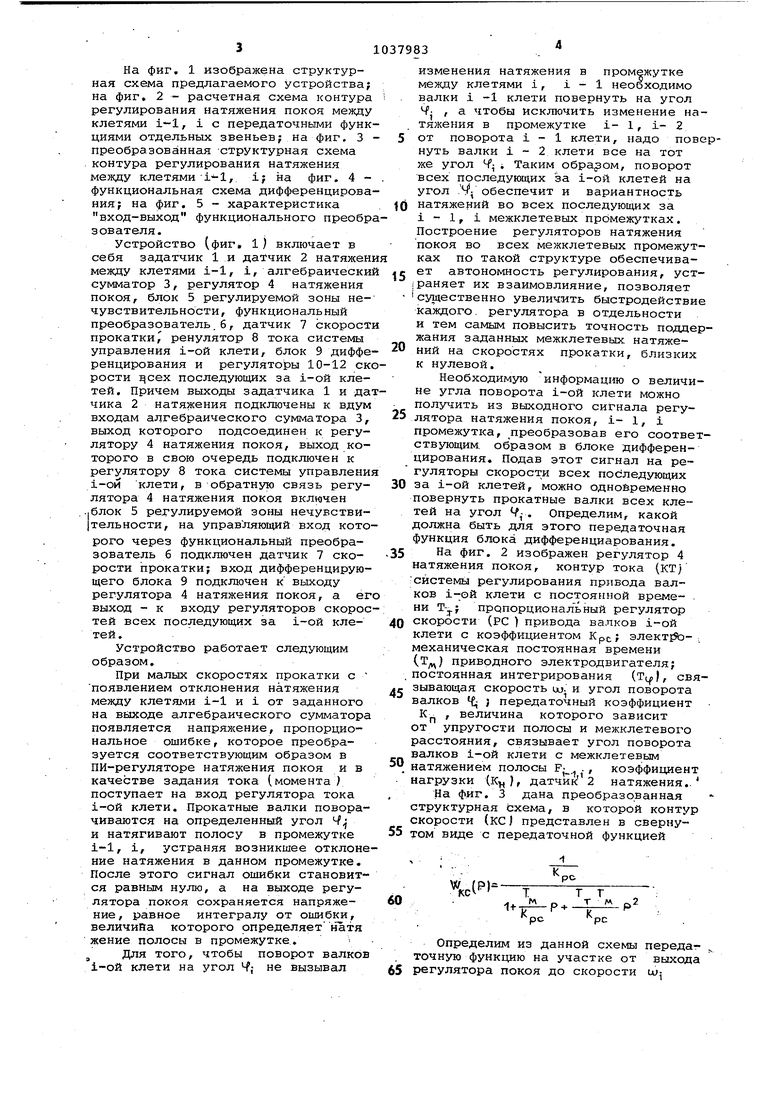
На фиг. 3 дана преобразованная структурная схема, в которой контур скорости (КС) представлен в свернутом виде с передаточной функцией
рс
Vln(P)
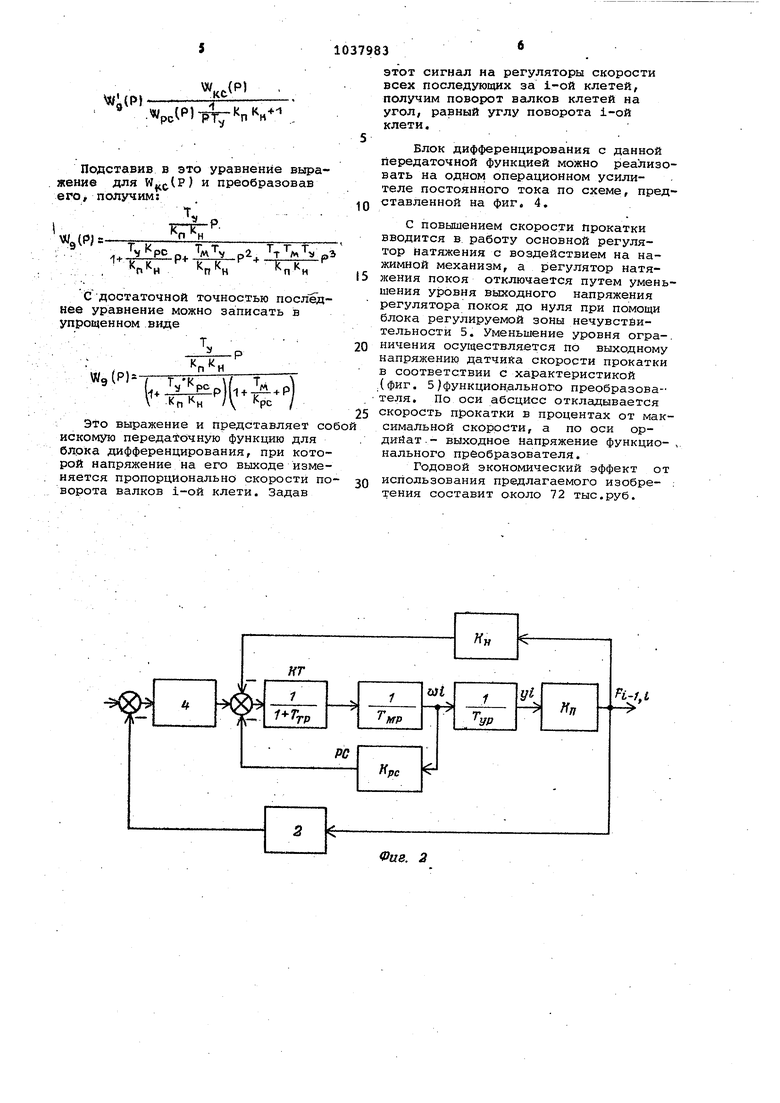
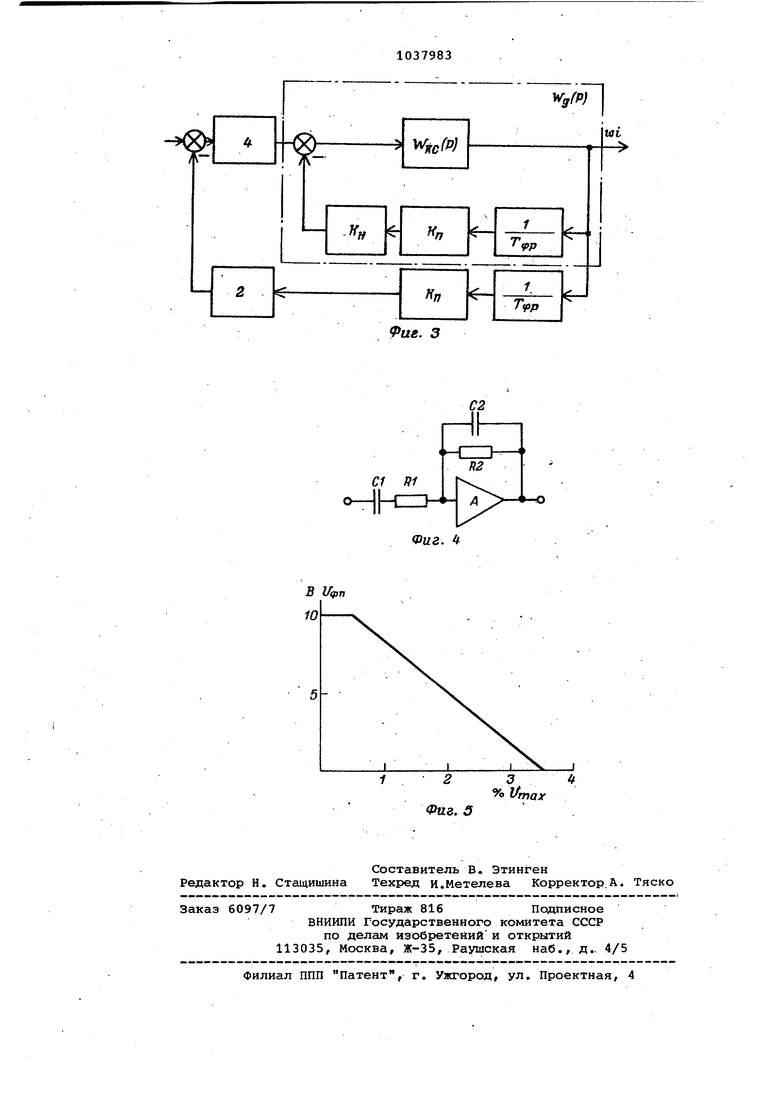
Определим из данной схемы переда- ., точную функцию на участке от выхода регулятора покоя до скорости ш ) V(P} .-: .). Подставив в это уравнение вы жение для (P) и преобразова его получим: . Т . .. «а(р; с достаточной точностью посл нее уравнение можно записать в упрощенном виде WgiP)..p /V Это выражение и представляе искомую передаточную функцию дл блока дифференцирования, при к рой напряжение на его выходе и няется пропорционально скорост ворота валков 1-ой клети. Зада этот сигнал на регуляторы скорости всех последующих за i-ой клетей, получим поворот валков клетей на угол, равный углу поворота 1-ой клети.. Блок дифференцирования с данной передаточной функцией можно реализовать на одном операционном усилителе постоянного тока по схеме, представленной на фиг, 4. С повышением скорости прокатки вводится в работу основной регулятор Натяжения с воздействием на нажимной механизм, а регулятор натяжения покоя отключается путем уменьшения уровня выходного напряжения регулятора покоя до нуля при помощи блока регулируемой зоны нечувстйительности 5. Уменьшение уровня огра-, ничения осу1чествляется по выходному напряжению датчика скорости прокатки в соответствии с характеристикой .(фиг. 5 функциондльноГо преобразователя. По оси абсцисс откладывается скорость прокатки в процентах от максимальной скорости, а по оси ордийат.- выходное напряжение функцио- , наЛьного преобразователя. Годовой экономический эффект от использования предлагаемого изобре- . тения составит около 72 тыс.руб.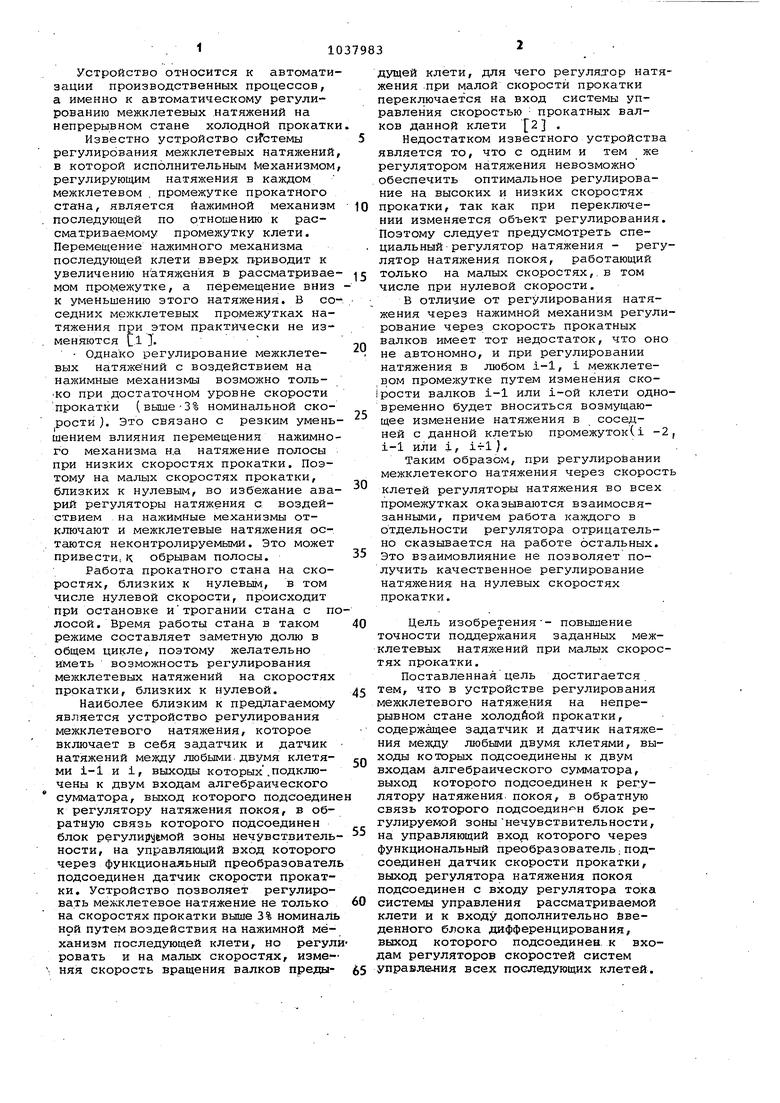
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ В МЕЖКЛЕТЕВОМ ПРОМЕЖУТКЕ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2010 |
|
RU2446026C2 |
| Устройство для измерения межклетевых натяжений проката | 1982 |
|
SU1039600A1 |
| Система стабилизации межклетевых натяжений проката на стане | 1982 |
|
SU1044360A1 |
| Адаптивный регулятор для непрерывного стана холодной прокатки | 1973 |
|
SU494207A1 |
| Устройство для стабилизации межклетевого натяжения полосы | 1982 |
|
SU1065052A1 |
| Устройство для регулирования натяжения полосы на непрерывном прокатном стане | 1982 |
|
SU1065051A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПРОКАТКИ В НЕПРЕРЫВНОЙ ГРУППЕ КЛЕТЕЙ | 2011 |
|
RU2477187C2 |
| РЕГУЛЯТОР МЕЖКЛЕТЕВОГО НАТЯЖЕНИЯ ПОЛОСЫ НА НЕПРЕРЫВНОМ СТАНЕ ХОЛОДНОЙ ПРОКАТКИ | 2001 |
|
RU2203752C2 |
| Устройство регулирования натяжения полосы | 1981 |
|
SU939150A1 |
| Устройство для регулирования натяжения полосы | 1972 |
|
SU528975A1 |
УСТРОЙСТВО РЕГУЛИРОВАНИЯ МЕЖКЛЕТЕВОГО НАТЯЖЕНИЯ НА НЕПРЕРЬШНОМ СТАНЕ ХОЛОДНОЙ ПРОКАТКИ, содержащее задатчик и датчик натяжения между любой рассматриваемой и предыдущей клетями, выходы ко.торых подсоединены к двум входам алгебраического сумматора, выход которого подсоединен с регулятору натяжения покоя, в обратную связь которого подсоединен блок регулируемой зоны нечувствительности, на управлянзщий вход которого через функциональный преобразователь подсоединен датчик скорости прокатки, о т jf и чающееся тем, что, с целью повышения точности поддержания заданного межклетевого натяжения при малых скоро сгях прокатки, включая нулевую скорость, выход регулятора натяжения покоя подсоединен к входу регулятора тока системы управления рассматриваемой клети и к входу дополнительно введенного блока диф- С ференцирования, выход которого подключен к входам регуляторов скоростей систем управления всех послелуннцих клетей. S С б СО со 00 00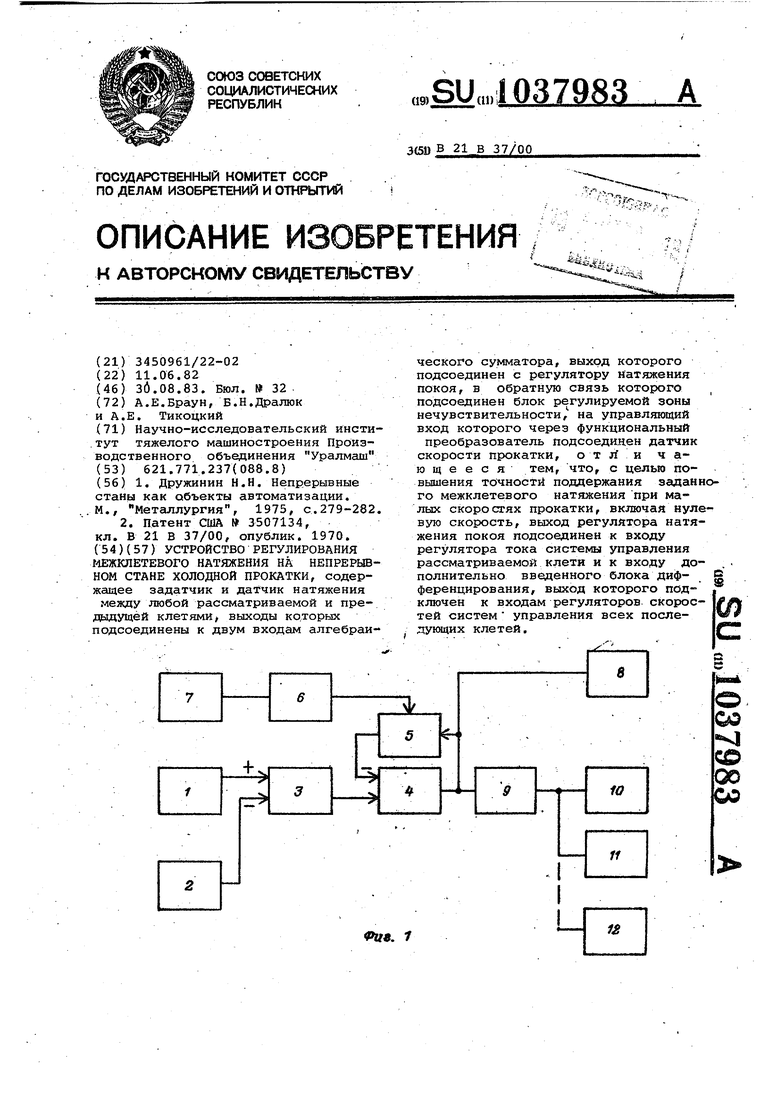
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дружинин Н.Н | |||
| Непрерывные станы как объекты автоматизации | |||
| .М., Металлургия, 1975, с.279-282 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 3507134, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
