четвертого сумматора, третий вход которого соединен с выходом четвертого блока усиления, а вход последнего - с первым выходом датчика давления , второй выход датчика давления соединен с вторым входом третьего блока умножения, выход пятого сумматора соединен с вторым входом шестого сумматора, а выход первого сумматора соединен с входом первого
блока интегрирования выход последнего соединен с вторым входом первого блока умножения, а выход первого блока умножения соединен с вторым входом второго сумматора,второй выход третьего блока усиления соединен с первым входом третьего ключа,второй вход которого соединен с выходом второго датчика Наличия металла, а выход третьего ключа является выходом устройства. 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения межклетевого натяжения проката | 1985 |
|
SU1247114A1 |
| Устройство для измерения межклетевых натяжений проката | 1983 |
|
SU1101310A2 |
| Устройство регулирования натяжения в межклетевом промежутке прокатного стана | 1990 |
|
SU1722638A1 |
| Устройство для регулирования межклетевых натяжений | 1984 |
|
SU1174112A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Устройство для регулирования скорости реверсивного прокатного стана с вертикальными и горизонтальными валками | 1980 |
|
SU956082A1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |
| Система регулирования натяжения полос | 1980 |
|
SU931254A1 |
| Система автоматического управления поштучным редуцированием с натяжением на многоклетевом стане с индивидуальным электроприводом | 1985 |
|
SU1297959A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЕЖКЛЕТЕВЫХ НАТЯЖЕНИЙ ПРОКАТА В не, прерывных, прокатных станах, содержащее датчик тока якоря электродвигателя предыдущей клети, датчик скорости вращения вала электродвигателя, .дат-чик ЭДС этого же электродвигателя, , датчик наличия металлав предыдущей клети, датчик давления металла на всшки этой же клети, шесть сумматоров, три блока усиления, три блока умножения, четыре блока интегрирова ния, два ключа и элемент НЕ причем выход датчика тока якоря электродвигателя соединен с первым входом первого сумматора, первый выход.датчика скорости соединен с первым входом второго сумматора, выход которого соединен с входом, первого блока усиления, первый выхрд которого соединен с вторым входом первого сумматора, выход датчика ЭДС соединен с первым входом третьего сумматора, выход которого, соединен с входом второго блока интегрирования, первый выход которого соединен с первым входом первого блока умнозкения, , , а второй выход - с первым входом 1 второго блока умножения, второй Ьход .последнего, соединен с вторым выходом I датчика, скооости , а выход второго : блока умножения соединен с вторым входом третьего сумматора, выход четвертого сумматора соединен с входом второго блока усиления, выход которого соединей с первым входом первого ключа, а второй вход последнего соединен с первым выходом элемента НЕ, вход которого подсоединен к первому выходу первого датчика наличия металла, выход первого ключа соединен с входом третьего блока,интегрирования, первый выход которого соединен с первым входом четвертого . сумматора, а второй выход третьего блока интегрирования соединен с первым входом пятого сумматора, выход третьего блока умножения соединен с | первым входом шестого сумматора, выход которого соединен с входом (Л третьего блока усиления, а первый выход последнего соединен с первым входом второго ключа, второй вход которого соединен с вторым выходом первого датчика нгшичия метаьлла, вы.ход второго ключа соединен с первым входом Четвертого блока интегрирования, второй вход которого соединен САЭ с вторым выходомэлемента НЕ, а выСО О) ход четвертого блока интегрирования соединен с первым входом третьего блока умножения, отличающееся тем, что., с целью -повышения точности измерения межклетевых натя-, жений и повышения качества проката, в него дополнительно введены четвертый блок умножения, четвертый блок усиления, третий ключ и второй датчик наличия металла в последующей клети, причем первый вход четвертого блока умножения соединен с вторым выходом первого блока усиления, второй вход четвертого блока умножения соединен с третьим выходом второго блока интегрирования, первый выход четвертого блока умножения соединен с вторым входом пятого сумматора, :а второй выход - с вторым входом
Изобретение относится к контроль ,ным и регулирующим .устройствам прокатных станов, реагирующим на изменение натяжения проката, например на станах горячей прокатки, и.может быть использовано-В черной металлур гии, в прокатном производстве. Известно устройство для измерени натяжения проката в непрерывном про катном стане, содержащее датчик напряжения на якоре электродвигателя предыдущей клети, датчик тока якоря электродвигателя предыдущей клети, датчик скорости вращения вала элект родвигателя предыдущей клети, датчи наличия металла в двух смежных для межклетевого промежутка клетях, дат чик давления металла на валки преды дущей клети и ряд логических блоков- 1 J. Для вычисления момента про катки Мпр используют зависимость из /V :i- -2- I np- w« где и - напряжение на якоре двигат ля , в 9 - ток якоря двигателя. А; WA- скорость вращения вала электродвигателя, 1/с. Натяжения проката определяют из зависимости г. « -2«лР, (2) где д Мр,р- изменение момента npOKaT ки в (Предьвдущей клети после входа металла в по следующую клеть (по отношению к свободной прокатки) ; а - плечо равнодействующей контактных.сил; ДР - приращение давления металла на валки предыдуще клети. . Недостатком этого устройства являвхся невысокая точность измерения натяжения, которая обуславливается следующими причинами. Измеряется полный ток якоря двигателя, из которого необходимо вычесть динамический ток дЬигатепя, ток пропорциональный моменту трения, т.е. момент натяжения должен вычисляться из зависимости -. . . ,(Х4Р-гЗМ р-ЛМ, (3) где - приращения момента трения; ЛМ.д - приращения динамического момента. В устройстве нео.бходимо вычислять плечо равнодействующей контактных сил, однако не указан путь его определения. Приращение давления Р должно вычисляться: в абсолютных величинах, т.е. измеренное значение .давления и(1л должно соответствовать фактическому Рф|Рр Кр РИЗРЛ, и коэффициент К должен быть известен. В реальных условиях пропорциональность соблюдается, но коэффициент К может со временем измениться, что вызывает увеличение ошибки в определении момента натяяения. Наиболее близким к предложенному является устройство для измерения мёжклетевык натяжений проката, содержащее, в частности, датчик тока, якоря электродвигателя предыдущей клети, датчик скорости вращения вала, датчик ЭДС этого же электродвигателя,.; датчик наличия металла в предыдущей клети, датчик давления металла на валк:а этой же клети и ряд логических схем. Устройство работает следующим образом. От измеренного датчиком значения якорного тока 3 электродвигателя прокатной клети отнимается определенный с помощью моделирования динамический ток 3 двигателя и ток 3j(j( холостого хода. Предпосылкой для однозначного измерения величины натяжения и исключения помех является точный учет и компенсация динамической составляющей Зл. тока якоря двигателя или, что то самое, точное определение статического тока Э, якоря двигателя. В устройстве с помощью, моделирования определяется динамическая составляюща ,3 тока якоря электродвигателя, которая определяется путем дифференцирования сигнала с тахогенератора пропорционсшьного скорости двигателя 23. Основным недостатком датчиков (измерителей) динамического тока, построенных на принципе дифференцирования сигнала тахогенератора, является низкая точность. Для определения тока Эрр пропорционального моменту прокатки М р необходимо из тока якоря DO электродвигателя искл чить динамическую составляющую Эд и ток холостого хода Ругг т.е. i np VV4 и, следовательно, необходимо фикси- ровать ток холостого хода электродвигателя. В выражении (4) CJpp опре деляется неточно, так как ; пр тр / где - ток пропорциональный моменту трения . Следовательно, ОПР в выражении (4) содержит , т.е. Эрр-Дтр Я- - хх устройстве име ется узел определения тока холостог хода. Для оценки недостатков узла определения тока холостого хода выразим Момент двигателя Мдр через составляющие его величины Мдв МПР+ Мд+ , (5) где М - момент, добавочных сил тре ния, возникающих при проходе прокатываемого метгш ла между вгшками в подашп никах валков, в передаточ ном механизме и других частях стана; Мд - динамический момент на валу двигателя. При отсутствии металла в валках и отрицательном зазоре (валки в забое ) новая валковая .система будет находиться под давлением Р jy пропорциональным отрицательным зазору и жесткости клети. Момент трения состоит из двух составляющих M, -.Kt-h где (9 - диаметр цапф - коэффициент трения в подшип никах валков; 1 - КПД передачи от двигателя к валкам; - передаточное число этой пе редачи и , x(2aPi-tJfP) K 4K2JP, (-)). Таким образом, при отсутствии металла в валках и отрицател&ном зазоре (т.е. наличии давления ) статический момент равен ( ст--хх трхх где трхх т°к двигателя/ пропорциональный моменту трения без металла в клети. Неустройстве для измерения натяжения измеряетсястатический ток при отсутствии металла в валках и утверждается , что это ток холостого хода i , что справедливо при положительном зазоре между валками. При отрицательном зазоре между валками ток холостого хода должен определяться из выражения (7) : Следовательно, для повышения точности устройства необходимо вводить при определении тока холостого хода корректирующий сигнал При наличии металла в валках и постоянном магнитном потоке О -Эд- тр- хх - г причем ток пропорциональный моменту трения МТР ( К2)Р содержит и JTP XX если валки установлены с отрицательным зазором. Кроме того, к недостаткам данного устройства (в частности узла определения тока холостого хода) следует отнести отсутствие корректировки тока холостого хода npi ослаблении магнитного потока Ф обмотки возбуждения двигателя. Известно, что и М..:Фа x . откуда Ь - т.е. с ослаблением магнитногб потока ф ток холостого хода при этом же моменте М должен возрастать. Недостатки узла определения сигнала пропорционального натяжению. Для определения усилия натяжения необходимо дополнительно определять коэффициент пропорциональности, зависящий от заданного значений натя- жения. Это является недостатком устройства. Кроме того, определение коэффициента пропорциональности происходит при начальном значении магнитного потока Фо, но этот коэффициeHT зависит от магнитного потока и npH изменении последнего (что характерно для главных приводов современных прокатных станов) должен соответственно корректироваться. Следовательно, при изменении магнитного потока двигателя (в 1, раза) вносится существенная ошибка.
Таким образом, недостатки устройства (прототипа) следующие. Низкая точность .датчика динамическотпа тока, построенного на принципе дифференцирования сигнала тахогенератора (сигнала скорости вращения вала двигателя) . При определении тока холостого хода отсутствует корректирующий сигнал пропорциональный давлению, создаваемому в клети за счет отрицательного зазора между рабочими валками, что вносит дополнительную погрешность. Отсутствие корректировки тока холостого хода при ослабле.НИИ магнитного потока электродвигателя не позволяет применить устройство .на станах, где скорость электродвигателей рабочих валков клетей в пределах прокатки одной полосы регулируется как изменением якорного напр|Яжения, так и ослаблением магнитного потока двигателя. Для расчета величины заданного значения натяжения необходимо определить плечо равнодействующей контактных сил. Коэффициент пропорциональности между давлением металла на валки и током определяется при начальном значении магнитного потока электродвигателя, но в связи с тем, что величина тока зависит от величины магнитного потока, при изменении последнего необходимо пропорционально изменять и величину коэффициента. Такая конструкция в устройстве отсутствует.
Цель изобретения - повыи-.ение точности измерения межклетевых натяжений и повышение качества проката.
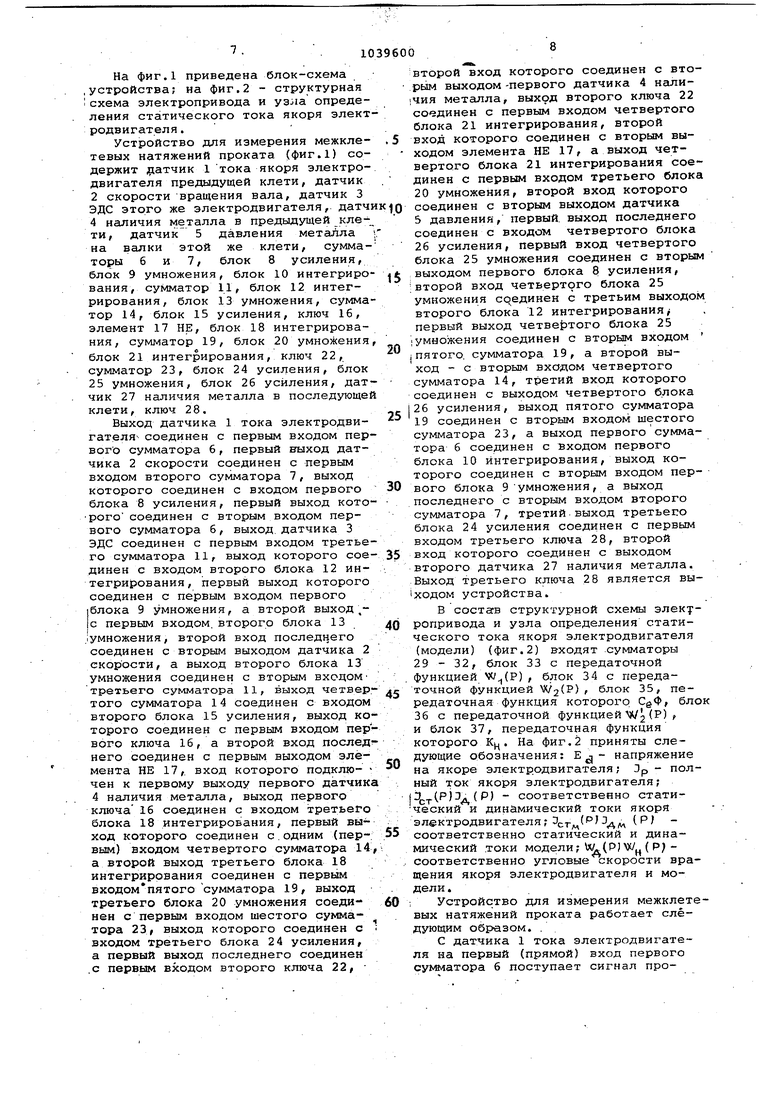
Поставленная цель достигается тем, .что в .устройство,, содержащее, датчик тока якоря, электродвигателя предыдущей клети, датчик скорости вращения вала электродвигател;, датчик ЭДС этого же электродвигателя, датчик наличия металла в предаДущей клети, датчик давления металла на валки этой же клети, шесть сукматоров, три блока усиления, три блока умножения, четыре блока интегрирования, два ключа и элемент НЕ, причем выход датчика тока якоря электродвигателя соединен с первым входом первого сумматора, первый вход датчика скорост-и соединен с первым входом второго сумматора, выход которого соединен с входом первого блока усиления, первый выход которого соединен с BToptoM входом первого сумматора, выход датчика ЭДС соединен с первым входом третьего сумматора, выход которого соединен с входом второго блока интегрирования, первый
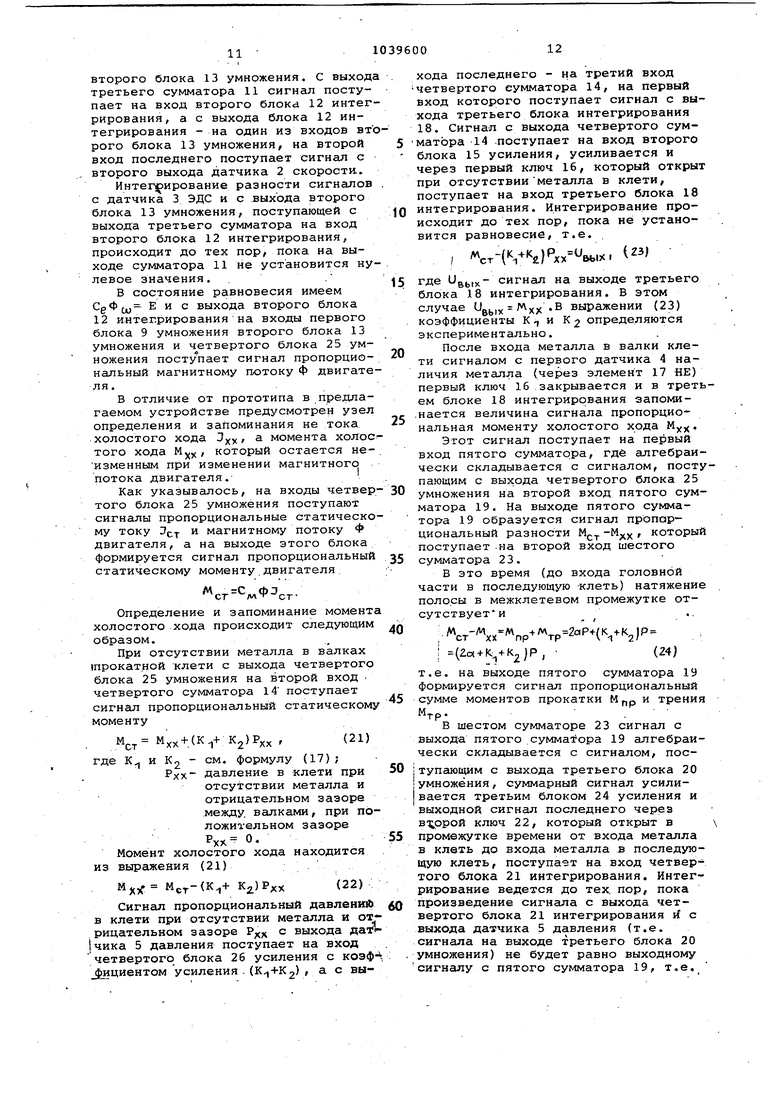
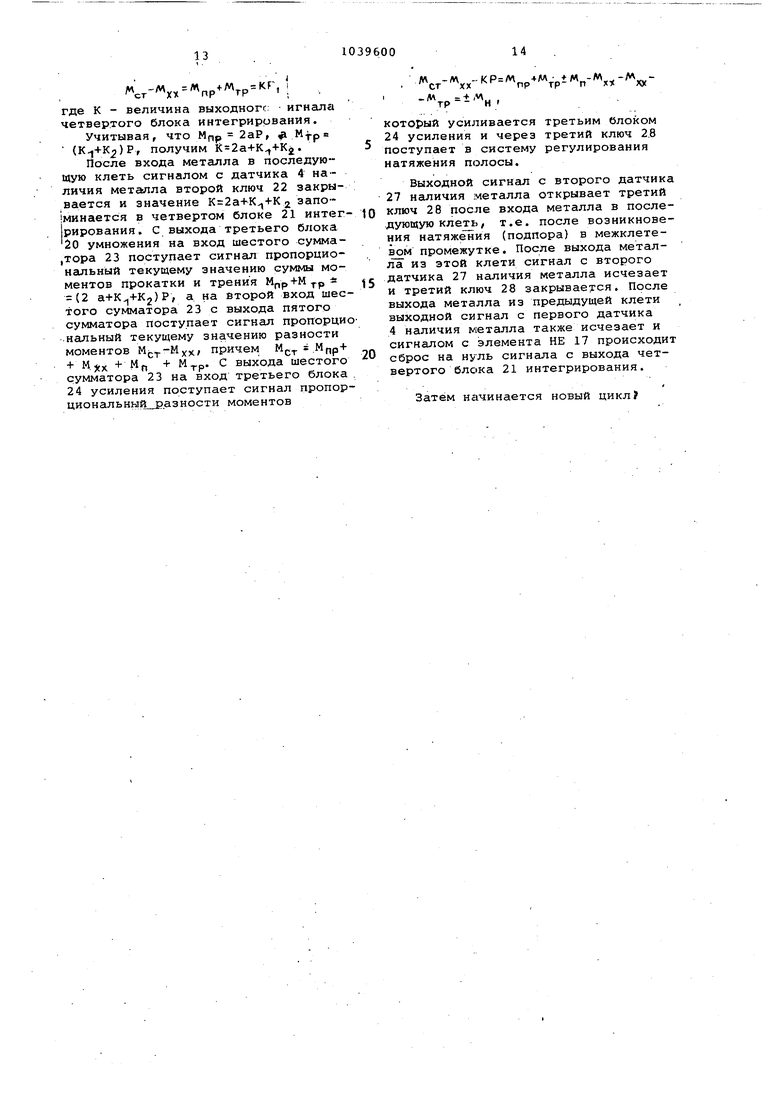
выход которого со.единен с первым -ВХОДОМ первого блока умножения, а второй выход - с первб1м входом второго блока умножения, второй вход последнего соединен с вторым выходом датчика скорости, а выход втброго блока умножения соединен с вторым входом третьего сумматора, выход четвертого сумматора соединен с входом второго блока усиления, выход которого соединен с первым входом первого клича, а второй вход последнего соединен с первым выходом элемента НЕ, .вход которого подключен к первому выходу первого датчика наличия металла, выход первого ключа соединен с входом третьего блока интегрирования, первый выход которого соединен с первым входом четвер.того сумматора, а второй выход третьего блока интегрирования соединен с первым входом пятого сумматора, выход третьего блока умножения соединен с первым входом шестого сумматора, выход которого соединен с входом третьего блока усиления, а первый выход последнего соединен -с первым входом второго ключа, второй, вход которого соединен с вторым выходом первого датчика наличия металла, выход второго ключа соединен с первым входом четвертого блока интегрирования, второй вход которого соединен с вторым выходом элемента НЕ, а выход четвертого блока интегрирования соединен с. первым входом третьего блока умножения, дополнительно введены четвертый блок умножения, четвертый блок усиления, третий ключ и второй датчик наличия металла в последующей клети, причем первый вход четвертого блока умножения соединен с вторым .выходом первсэго блока усиления, второй вход четвертого блока умножения соединен с третьим выходом второго блока интегрирования , первый выход четвертого блока умножения соединен с вторым входом пятого сумматора, а второй выход - с вторым входом четвертого блока усиления, а вход последнего с первым выходом датчика давления, второй выход датчика давления соединен с вторым входом третьего блока умножения, выход пятого сумматора соединен с вторым входом шестого сумматора, а выход первого сумматора соединен с входом первого блока интегрирования, выход последнего соединен с вторым входом первого блока умножения, а выход первого блока умножения соединен с вторым входом второго сумматора, второй вйход Третьего блока усиления соединен с первым входом третьего ключа,второй вход которого соединен с выходом второ го датчика наличия металла,а выход тре5 тьего ключа является выходом устройств На фиг.1 приведена блок-схема .устройства; на фиг.2 - структурная схема электропривода и определения статического тока якоря элект родвигателя . Устройство для измерения межклетевых натяжений проката (фиг.1) содержит датчик 1 тока якоря электродвигателя предыдущей клети, датчик 2 скорости вращения вала, датчик 3 ЭДС этого же электродвигателя, датч 4 наличия металла в предыдущей клети, датчик 5 давления металла на валки этой же клети, сумматоры б и 7, блок 8 усиления, блок 9 умножения, блок 10 интегриро вания, сумматор 11, блок 12 интегрирования, блок 13 умножения, сумма тор 14, блок 15 усиления, ключ 16, элемент 17 НЕ, блок 18 интегрирования, сумматор 19, блок 20 умножения блок 21 интегрирования, ключ 22, сумматор 23, блок 24 усиления, блок 25 умножения, блок 26 усиления, дат чик 27 наличия металла в последующей клети, ключ 28. Выход датчика 1 тока электродвигателя- соединен с первым входом первого сумматора 6, первый ныход датчика 2 скорости соединен с первым входом второго сумматора 7, выход которого соединен с входом первого блока 8 усиления, первый выход которого соединен с вторым входом первого сумматора б, выход датчика 3 ЭДС соединен с первым входом третьего сумматора 11, выход которого соединен с входом второго блока 12 интегрирования , первый выход которого соединен с первым входом первого блока 9 умножения, а второй выход ,с первым входом, второго блока 13 1умножения, второй вход последнего соединен с вторым выходом датчика 2 скорости, а выход второго блока 13 умножения соединен с вторым входом третьего сумматора И, выход четвертого сумматора 14 соединен с входом второго блока 15 усиления, выход которого соединен с первым входом первого ключа 16, а второй вход послед него соединен с первым выходом элемента НЕ 17,. вход которого подклю- чен к первому выходу первого датчика 4 наличия металла, выход первого ключа 16 соединен с входом третьего блока 18 интегрирования, первый выход которого соединен с.одним (первым) входом четвертого сумматора 14 а второй выход третьего блока 18 интегрирования соединен с первьом входомпятого сумматора 19, выход третьего блока 20 умножения соединен с первым входом шестого сумматора 23, выход которого соединен с 1 входом третьего блока 24 усиления, а первый выход последнего соединен с первым входом второго ключа 22, второй вход которого соединен с втоptJM выходом -первого датчика 4 нали1ЧИЯ металла, выхрд второго ключа 22 соединен с первым входом четвертого блока 21 интегрирования, второй вход которого соединен с вторым выходом элемента НЕ 17, а выход четвертого блока 21 интегрирования соединен с первым входом третьего блока 20 умножения, второй вход которого соединен с вторым выходом датчика 5 давления, первый, выход последнего соединен с входом четвертого блока 26 усиления, первый вход четвертого блока 25 умножения соединен с вторым выходом первого блока 8 усиления, ;второй вход четвертого блока 25 умножения со единен с третьим выходом второго блока 12 интегрированияj первый выход четве)того блока 25 умножения соединен с вторым входом i пятого, сумматора 19, а второй выход - с вторым входом четвертого сумматора 14, третий вход которого соединен с выходом четвертого б.лока 26 усиления, выход пятого сумматора 19 соединен с вторым входом шестого сумматора 23, а выход первого сумматора б соединен с входом первого блока 10 интегрирования, выход которого соединен с вторым входом первого блока 9умножения, а выход последнего с вторым входом второго сумматора 7, третий выход третьего блока 24 усиления соединен с первым входом третьего ключа 28, второй вход которого соединен с выходом второго датчика 27 наличия металла. Выход третьего ключа 28 является выходом устройства. В состагв структурной схемы элек гропривода и узла определения статического тока якоря электродвигателя (модели) (фиг.2) входят сумматоры 29 - 32, блок 33 с передаточной функцией W(p), блок 34 с передаточной функцией W2(P)f блок 35, передаточная функция которого. Се4, блок 36 с передаточной функциейWj(Р) и блок 37, передаточная функция которого Кц. На фиг.2 приняты следующие обозначения: Е - напряжение на якоре электродвигателя; Зр - полный ток якоря электродвигателя 5,(Р)Эд ( Р) - соответственно статический и динамический токи якоря электродвигателя; 3j.T-(P)J (Р) соответственно статический и динамический .токи модели; )V,(p)v/ ( р;соответственно угловые скорости вращения якоря электродвигателя и модели. Устройство для измерения межклетевых натяжений проката работает следующим образом. . С датчика 1 тока электродвигателя на первый (прямой) вход первого суьф атора б поступает сигнал пропорциональный току якоря электродви гателя, на второй вход (инверсный) сумматора 6 поступает сигнал обратной связи с первого выхода первого блока 8 усиления. Алгебраическая сумма этих сигналов поступает на вход первого блока 10 интегрировани являющегося совместно с первым блоком 9 умножения моделью блока 36 электропривода с передаточной функцией. „ W(P)i РТл,СеФ где R активное сопротивление якорной цели электродвигателя;электромеханическая постоя ная времени электропривода -коэффициент ЭДС двигателя; -коэффициент момента двигателя ;. -магнитный поток одного полюса электродвигателя; Y - момент инерции привода,при веденный к валу двигателя; ф . - ... причем первый блок интегрированияш ..реёшизует передаточную функцию . W .умножая которую на величину магнитного потока Ф двигателя в первом блоке 9 умножения, получаем указанную передаточйую функцию (11). Сигнал пропорциональный величине магнитного потока Ф формируется в узле определения магнитного потока и поступает на вход первого блок 9 умножения с блока 12 интегрирования. С выхода первого блока 9 умножения на прямой второй вход второго сумматора 7 поступает сигнал w , имеющий размерность угловой скорост ..который алгебраически складывается с сигнёШОМ WA пропорциональным угло вой скорости двигателя и поступающим с датчика 2 скорости на инверсный (первый) вход второго сумматора 7. Сигнал с выхода второго сумматор f поступает на вход первого блока 8 усиления и на выходе последнего формируйтся сигнал пропорциональный величине статического тока.: якоря электродвигателя Из структурной (фиг.2) имеем , откуда VJ (Р D,lP)0(P).(3) Ч(/2 (Р) аналогично 3(РФРТ 21Р) (Р)«ХТ(Р)+ Подставляя выражение (15) в (13) получим W IP)-W(P) f . (-f6J cr((Учитывая, что (из структурной охемы на фиг.2), „1Р)-№ЛР)-1Г( А д И подставляя (17) в выражение (16), находим, после преобразований (P, )сг(р). (,1я) Подставляя в последнее выражение (18) значение 2(Р)),(иэ11) пределяем т(РЬ(9/ Т, р.. где Из последнего выражения (19) замечаем, что контур определения статического тока устойчив и при достаточной большой величине коэффициента обратной связи К . ( Ц В контуре отсутствует операция дифференцирования, что повышает точность и надежность определения статического тока электродвиСТ с т л гателя.- Величина, магнитного потока двигателя определяется так же, как и в прототипе, с помощью датчика 3 ЭДС, третьего сумматора 11, второго блока 12 интегрирования, второго блока 13 умножения и: датчика 2 скорости (фиг,1). Сигнал с датчика 3 ЭДС поступает на первый «ход третьего сумматора на второй вход которого поступает сигнал обратной связи с выхода . второго блока 13 умножения. С выход третьего сумматора И сигнал поступает на вход второго блока 12 интег рирования, а с выхода блока 12 интегрирования - на один из входов вт рого блока 13 умножения, на второй вход последнего поступает сигнал с второго выхода датчика 2 скорости. Интегрирование разности сигналов с датчика 3 ЭДС и с выхода второго блока 13 умножения, поступающей с выхода третьего сумматора на вход второго блока 12 интегрирования, происходит до тех пор, пока на выходе сумматора 11 не установится ну левое значения. .. В состояние равновесия имеем , Е и с выхода второго блока 12 интегрирования на входы первого блока 9 умножения второго блока 13 умножения и четвертого блока 25 умножения посту пает сигнал пропорциональный магнитному потоку Ф двигате ля .. , В отличие от прототипа в предлагаемом устройстве предусмотрен узел определения и запоминания не тока холостого хода хх момента холос того хода Му, который остается неизменным при изменении магнитного потока двигателя.Как указывалось, на входы четвер того блока 25 умножения поступают сигналы пропорциональные статическо му току U(; и магнитному потоку Ф двигателя, а на выходе этого блока формируется сигнал пропорциональный статическому моменту двигателя сг СмФ сгОпределение и запоминание момент холостого хода происходит следующим образом. При отсутствии металла в валках (прокатной клети с выхода четвертого блока 25 умножения на второй вход четвертого сумматора 14 поступает сигнал пропорциональный статическом моменту ( К2)Рхх (21) где К и К - см. формулу (17); РХХ давление в клети при отсутствии металла и отрицательном зазоре между, валками, при по ложительном зазоре РХХ О Момент холостого хода находится из выражения (21) . Mj( К2.)Рхх (22) Сигнал пропорциональный давлений в клети при отсутствии метсшла и от рицательном зазоре Р,; с выхода чика 5 давления поступает на вход четвертого блока 26 усиления с коэф циентом усиления . (К,,+К2) , а с выхода последнего - на третий вход четвертого сумматора 14, на первый вход которого поступает сигнал с выхода третьего блока интегрирования 18. Сигнал с выхода четвертого сумматЬра 14 .поступает на вход второго блока 15 усиления, усиливается и через первый ключ 16, который открыт при отсутствииметалла в клети, поступает на вход третьего блока 18 интегрирования. Интегрирование происходит до тех пор, пока не установится равновесие, т.е. cT-(V), 23) где Ug,- сигнал на выходе третьего блока 18 интегрирования. В этом случае Ug, Wxx -В выражении (23) коэффициенты К ;, и К 2 определяются экспериментально. После входа металла в валки клети сигналом с первого датчика 4 наличия металла (через элемент 17 НЕ) первый ключ 16 закрывается и в третьем блоке 18 интегрирования запоми.нается величина сигнала пропорциональная моменту холостого хода М. Этот сигнал поступает на первый вход пятого сумматора, где алгебраически складывается с сигналом, поступающим с выхода четвертого блока 25 умножения на второй вход пятого сумматора 19. На выходе пятого сумматора 19 образуется сигнгш пропорциональный разности хх который поступает .на второй вход шестого сумматора 23. Б это время (до входа головной части в последующую -клеть) натяжение полосы в межклетевом промежутке отсутствует и,. , i (2а + К.К)Р, (24) т.е. на выходе пятого сумматора 19 формируется сигнал пропорциональный сумме моментов прокатки М,р и трения МТР- . - в шестом сумматоре 23 сигнал с выхода пятого сумматора 19 алгебраически складывается с сигналом, поступающим с выхода третьего блока 20 умножения, суммарный сигнал усиливается третьим блоком 24 усиления и выходной сигнал последнего через вхррой ключ 22, который открыт в промежутке времени от входа металла в клеть до входа металла в последующую клеть, поступает на вход четвертого блока 21 интегрирования. Интегирование ведется до тех. пор, пока роизведение сигнала с выхода четертого блока 21 интегрирования rf с ыхода датчика 5 давления (т.е. игнала на выходе третьего блока 20 множения) не будет равно выходному игналу с пятого сумматора 19, т.е.
. 1 . где К - величина выходногс: игнала четвертого блока интегрирования.
Учитывая, что , fi ()Р, получим .
После входа металла в последующую клеть сигналом с датчика 4 наличия металла второй ключ 22 закрывается и значение запоминается в четвертом блоке 21 интег рирования. С выхода третьего блока 20 умножения на вход шестого сумма,тора 23 поступает сигнал пропорционгшьный текущему значению суммы моментов прокатки и трения (2 )Pf а на второй вход шестого сумматора 23 с выхода пятого сумматора поступает сигнал пропорцинальный текущему значению разности
моментов Mj- -Myxi причем Mj,s.Mf,p+ - - - - + М,
+ М
+ М т-р. с выхода шестого
XX
сумматора 23 на вход третьего блока 24 усиления поступает сигнал пропорциональный разности моментов
. cr- x-кp np тpi%-.- xx- ТР Нкоторый усиливается третьим блоком 24 усиления и через третий ключ 2.8 поступает в систему регулирования натяжения полосы.
Выходной сигнал с второго датчика 27 наличия металла открывает третий ключ 28 после входа металла в последующую ) , т.е. после возникновения натяжения (подпора) в межклетеВ М промежутке. После выхода металла из этой клети сигнал с второго датчика 27 нгшичия металла исчезает и третий ключ 28 закрывается. После выхода металла из предыдущей клети выходной сигнал с первого датчика 4 наличия металла также исчезает и сигналом с элемента НЕ 17 происходит сброс на нуль сигнала с выхода четвертого блока 21 интегрирования.
Затем начинается новый цикл
I 3/ieff/npff/r/)t/fff
Л
Jf
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| WahneBt Н | |||
| Minimoltugregelung fur Warmwalzstra en | |||
| DezWEM-EPentro-AnEagenban | |||
| Ш, l5, 1979, № 4, | |||
| S | |||
| Деревянное стыковое устройство | 1920 |
|
SU163A1 |
