Иаобрегение огносигся к гранспоргному машиностроению и может быть использовано в конс1рукциях автомобилей для ловьпиения безопасности движения.
По основному авт. св. № 8О1907 иэ- 5 вестно устройство для определения боковой устойчивости автомобиля, содержащее датчик скорости движения автомобиля, датчик угла поворота управляемых колес, преобразователь угловых перемещений в 10 напряжение, вход которого соединен с .выходом датчика угла пов Ьрота управляемых колес,, блок перемножения, блок деления, первый вход которого соединен с выходом блока перемтзожения, ключ, блок задания is расстсяния между осями автомобиля, блок сравнения, блок индикации, усилитель, двигатель, редуктор, исполнительный механизм и блок задания коэффициента сцепления, при этом выход блока задания / 20 коэффициента сцепления соединен с первым Екодом блока п эемножения, второй вход кот орого подключен к выходу блока задания расстояния между осями автомо-г биля, выход преобразователя угловых пе- (25 ремещений в напряжение соединен с BTI)рым входом блока деления, выход которого и выход датчика скорости движения автомобиля подключен к входам блока сравнения, выход которого через ключ соединен зо с входом блока индикации и с входом усилителя, выход которого подключен к двигателю, вал которого через редуктор кинематически сжязан с валом испотштельного механизма JL .jОднако известное устройство не обеспечивает достижения необходимой точности определения критической скорости движения автомобиля по условиям бокового заноса и не дозволяет непрерывно опреде- лятъ коэффициент сцепления колес автомобиля с дорогой. Кроме того, известное устройство не обеспечивает визуальной ин-{ дикации величин критической скорости и коэффициента сцепления колес aвтoмoби- J ля с дорогой, что сужает функциональные Возможности устройства и сннжает безопасность движения автомобиля. .
Цель изобретения - расширение функциональных возможностей и повышение точноч
Поставленная цель достигается тем, что устройство для определения боковой устойчивости автомобиля снабжено датчиком замедленпя движения автомобиля, пре-у образователем, вход которого соединен с выходом датчика замедления движения автомобиля, формирователем, заполнйгельным блоком yMHostewiffl, один вход KOTopoj
го соединен с выходом преобразователя, а другой - с выходом формирователя, дву« мя коммутаторами, первый вход соединен с выходом дополнительного блока умножения, второй вход первого Коммутатора соединен с блоком задания коэффициента сцепления блока деления, схемой обработки, вход которой соединен с выходом, а выход - с входом блока умножения, второго коммутатора соединен с вьрсодом блока деления, схемой обработки, вход, которой соединенТг выходом второго коммутатора, , дополнвтвль{а 1м блоком, индикации, подключенным к йыходу схемы обработки./
На чертеже йзофажена блок-схема предлагаемого устройства.
Устройство содер сит датчик. 1 скорости движения автомобиля, датчик 2 угла поворота управляемых колес, преобразователь 3 yrnoEOiik п емешений в нвпряжение, входкоторого соединен с выходом датчика 2 угла поворота управлэмьп: колес, блок 4 лервмножения, блок 5 деления, первый вход которого соединен с выходом блока 4 перемножения, ключ 6, блок 7 заданш расстояния между осями автомобиля, блок 8 сравнения, блок 9 индикации, усилитель 10, двигатель 11, дуктор 12, исполнительный механизм 13, блок 14 задания коэффициента сцепления, датчик 15-замедления движения автомобиля, тфео азователь 16, формирователь 17, дополнитепышй блок 18 перемножения, первый коммутатор 19, второй коммутатор 20, дополнительный блок 21 индикации со схемой обработ, включак шей преобразователь 22 напряжение-код, генератор 23, блок 24 памяти, допоянительный формирователь 25 и дешифратор 26.
Первый вход блока 4 перемножения доо динен с выходом первого коммутатора 19,а второй вкод подключен к выходу, блока 7 задания расстояния между осями автомобиля, выход прео ааователя 3 угловых перемещений в напряжение соединен с вторым входом блока 5 деления, выход которого и выход датчика 1 скорости движения автомобиля подключены к входам 6ifoKa 8
. - сравнения, выход которого через ключ 6 соединен с входом блока 9 индикации и с кодом усилителя 10, выход которого подключен к двигателю 11, вал которого через редуктор 12 кШ1ематичеоя.х:вязан с валом исполнительного механизма 13, воздействующим на тормоз автомобиля, датчик 15 замедления движения автомобиля посредством преоИ заэователя 16 н
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения боковойуСТОйчиВОСТи АВТОМОбиля | 1979 |
|
SU801007A1 |
| Устройство для автоматизированной градуировки датчика силы | 1988 |
|
SU1606889A1 |
| Устройство для моделирования распределения материальных ресурсов | 1983 |
|
SU1125631A1 |
| Устройство для телединамометрирования глубинно-насосных скважин | 1990 |
|
SU1797131A1 |
| Устройство телединамометрирования глубинно-насосных установок | 1990 |
|
SU1767225A1 |
| Устройство для поддержания безопасной дистанции между автомобилями в потоке | 1989 |
|
SU1699827A1 |
| Цифровой универсальный измерительный прибор | 1986 |
|
SU1406491A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Измеритель длины проката | 1977 |
|
SU778839A1 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ БОКОВОЙ УСТОЙЧИВОСТИ АВТОМОБИЛЯ по авт. св. № 8О1О07, отличающееся тем, что, с целью повышения точности, оно датчиком замедления движения автомобиля, преобразователем, вход которогосоединен с вьщодом датчика замедления движенм автомобиля, формировагелем, дополнительным блоком умножения, один вход которого соединен с.выходом преобразователя, а другой - с выходом формирователя, двумя коммутаторами, первый вход которых соединен С выходом дополни.тельного блока умножения, второй вход первого коммутатора соединен с блоком задания коэффициента сцепления, а выход с входом блока умножения, второй вход второго коммутатора соединен с ижодом блока деления, схемой обработки, вход которой соединен с вькодом второго коммутатора, к дополнительным блоком индикации, подключенным к выходу схемы (О обработки.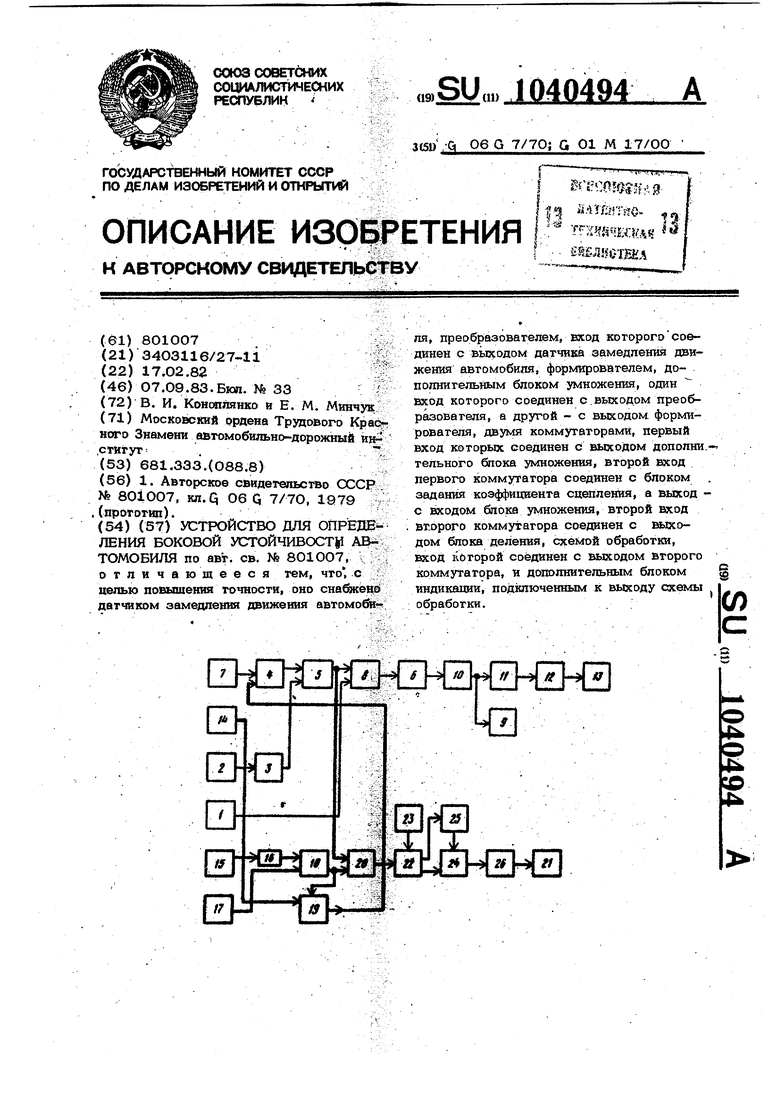
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения боковойуСТОйчиВОСТи АВТОМОбиля | 1979 |
|
SU801007A1 |
