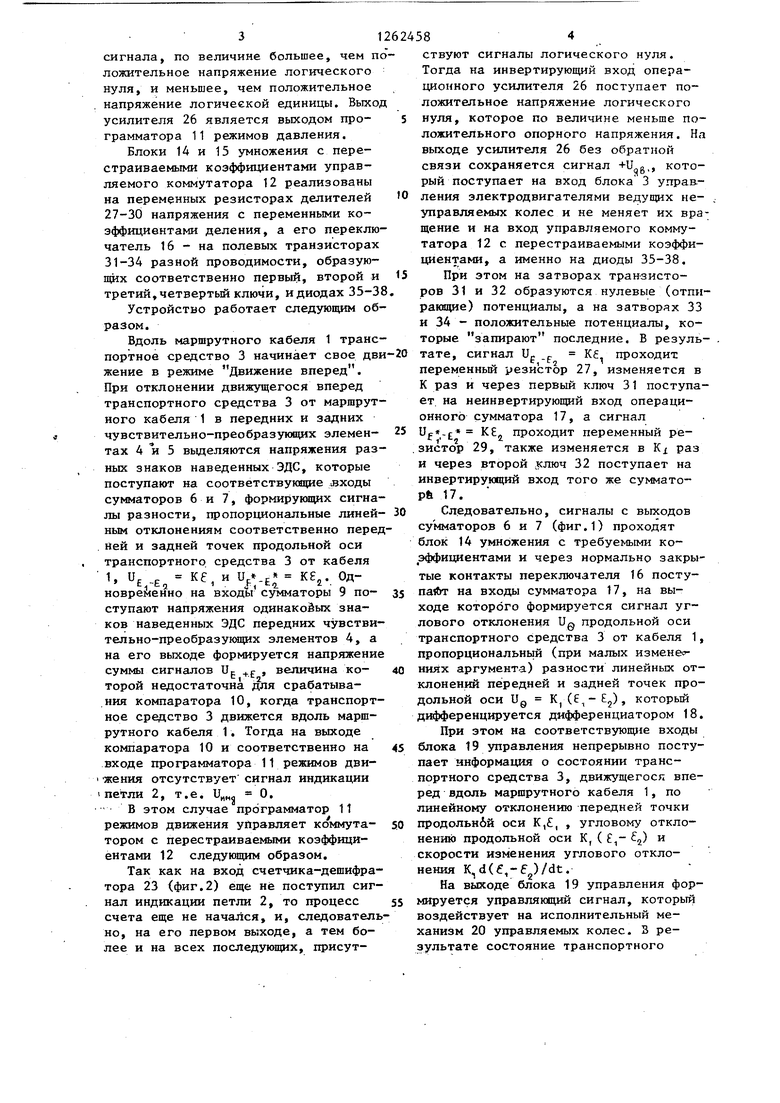
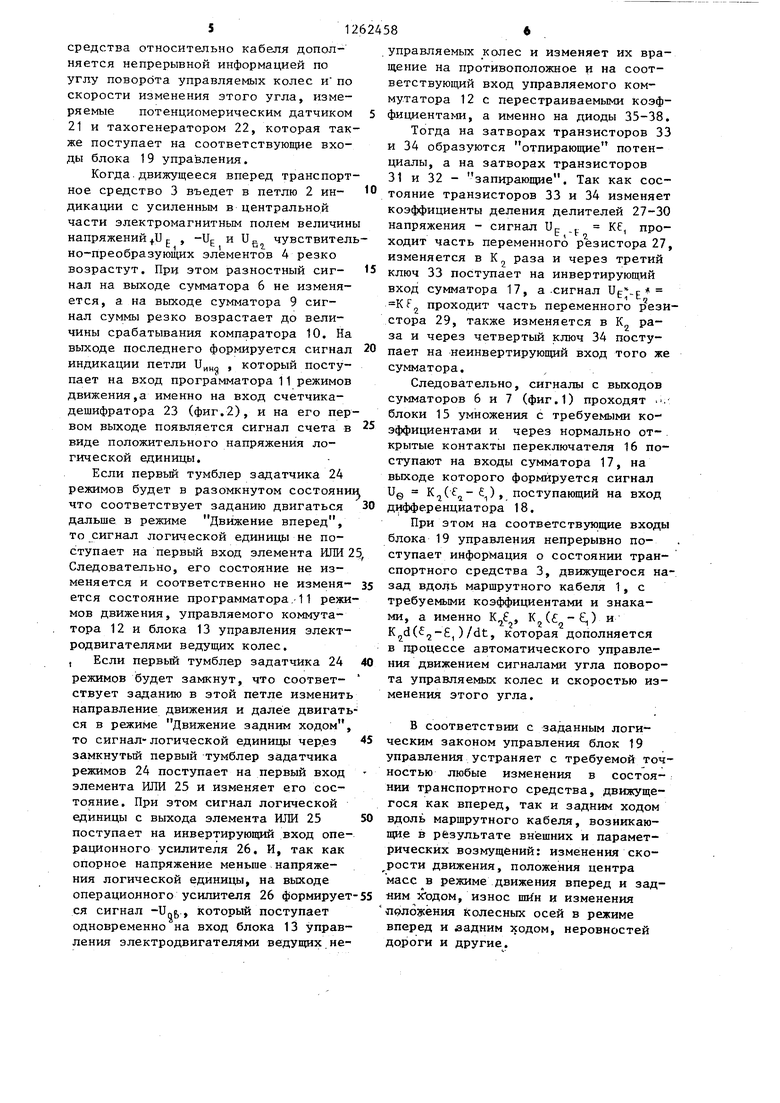
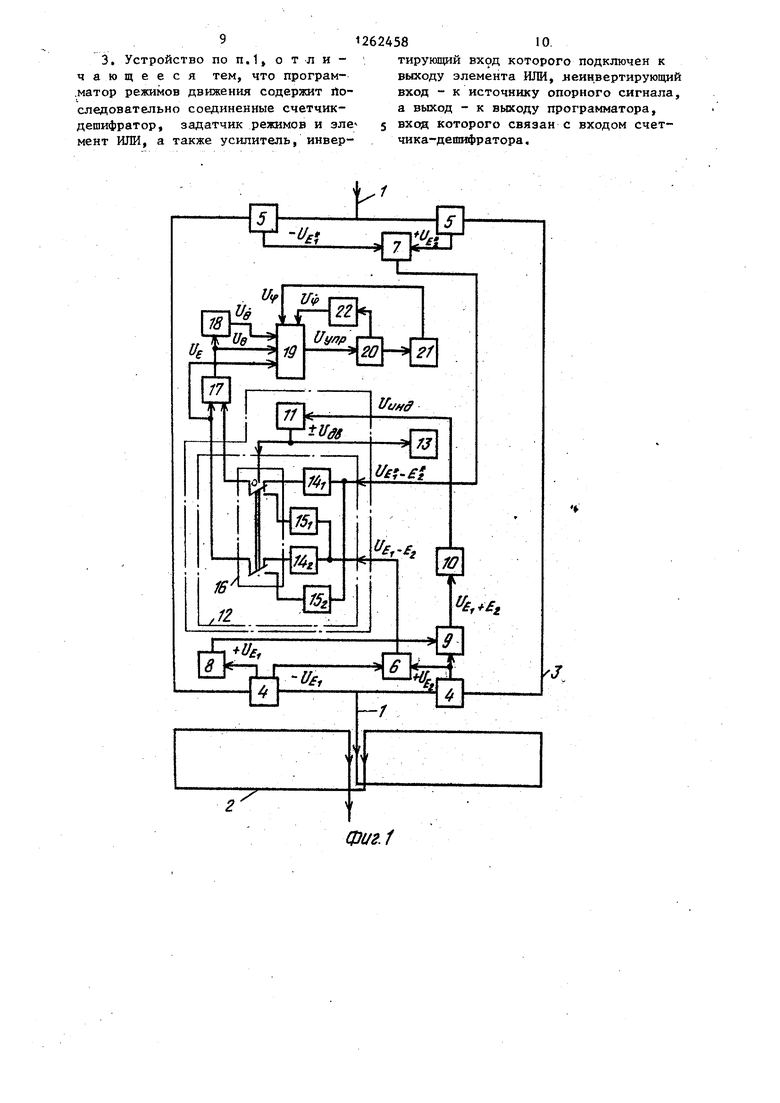
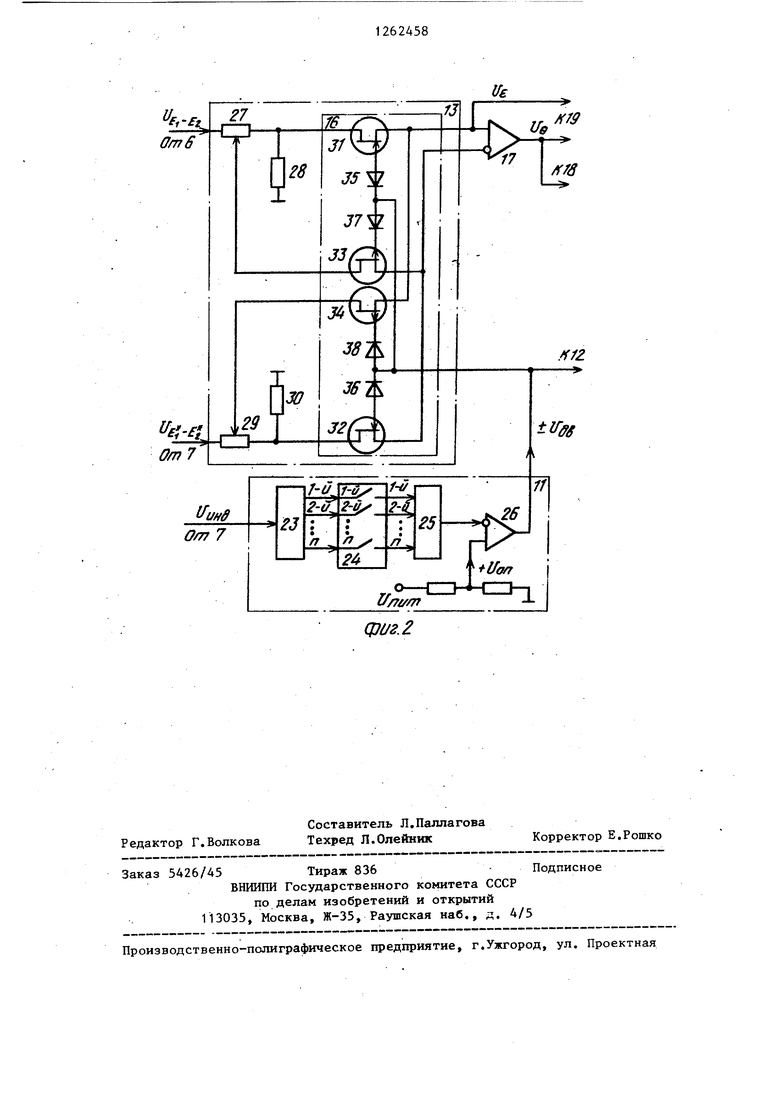
Изобретение относится к автоматическому управлению движением в,обоих направлениях колесных безрельсовых транспортных средств с индуктивным распознаванием предписанного маршрута движения и его определенных участ ков, задаваемых токонесущим кабелем и образованными из него петлями. Цель изобретения - расширение области применения устройства за счет увеличения комбинаций управляемых движений и повышение точности управления движением задним ходом. На фиг.1 изображена блок-схема устройства для управления движением транспортного средства в обоих направлениях; на фиг.2 - электрическая схема программатора режимов движения и управляемого коммутатора. Устройство (фиг.1) содержит токонесущий {маршрутный) кабель 1 и образованные из него петли 2, по которым протекает переменный ток определенной частоты (например, 5 кГц), дпя задания транспортному средству 3 маршрута движения и пунктов, где необходимо изменить направление движения на обратное согласно требуемой технологии транспортного процесса. На корпусе транспортного средства 3 симметрично его продольной оси спереди и сзади закреплены две пары чувствительно-преобразующих элементов 4 и 5, каждый из которых содержит индуктивную катушку, настроенную в резонанс на частоту тока в кабеле, усилитель переменного тока и амплитудно-фазовый детектор (содержание элементов 4 и 5 на фиг.1 не показано), выделяющих соответственно положительные и отрицательные ам плитуды полезных сигналов передних и задних элементов -U ь -U|« . ., +U, и Подключенных к входам соответствующих сумматоров 6 и 7. Причем,левый передний чувствительно преобразующий элемент 4 и амплитудн фазовый детектор 8 вьоделяют кроме о рицательной амплитуды полезного сиг нала и положительную +Ug , его выхо и выход правого чувствительно-преоб разующего элемента 4 подсоединены к входам сумматора 9, а выход последн го через компаратор 10 подсоединен к входу программатора 11 режимов движения. Выходы сумматоров 6 и 7 подсоеди нены к ; одним входам управляемого 1 8 коммутатора 12 с перестраиваемыми коэффициентами, а его другой вход подсоединен к выходу программатора 11 режимов движения, два состояния которого характеризуются знакопеременным сигналом, причем соответствует режиму Движение вперед, а -Ug6 - режиму Движение задним ходом. Одновременно выход программатора 11 режимов движения подключен к входу блока 13 управления электродвигателями ведущих неуправляемых колес. Управляемь1й коммутатор 12 с перестраиваемыми коэффициентами содержит блоки 14 и 15 умножения и переключатель 16, который в присутствии сигнала +ио6 , выходы сумматоров 6 и 7 через коэффициенты блоков 14, изменяющие сигналы Ur р и и ..л с в К - г г раз, подсоединяет к неинвертирующему и инвертирующему входам сумматора 17, а в присутствии сигнала --Ugg выходы этих же сумматоров 6 и 7 через коэффициенты блоков 15, изменянщие эти же сигналы в К„ раза. подсоединяют соответственно наоборот к инвертирующему и неинвертирующему входам того же сумматора 17, выход последнего подсоединен к входу дифференциатора 18. Первый выход управляемого коммутатора 12с перестраиваемыми коэффихщентами, а также выходы сумматора 17 и дифференциатора 18 подключены к соответствующим входам блока 19 управления исполнительным механизмом 20 управляемых колес (с переменной структурой), исполнительный механизм 20 оснащен потенциометрическим датчиком 21 угла поворота ,управляемых колес и тахогенераторбм 22, выходы последних подключены..к другим соответствующим входам блока 19 управления. Программатор 11 режимов движения содержит (фиг.2) счетчик-дешифратор 23 (собранный на сетэийных микросхемах К155ИЕ7 и К155ВДЗ), вход которого подключен к выходу компаратора 10,. а его п выходов через п тумблеров задатчика 24 режимов подключены к п входам элемента ИЖ 25 (микросхемы К155 ЛЛ1). последнего подсоединен к инвертирующему входу операционного усилителя 26 без обратной связи, на неинвертирзпощий вход которого Поступает положительное опорное напряжение с источника опорного сигнала, по величине большее, чем п ложительное напряжение логического нуля, и меньшее, чем положительное напряжение логической единицы. Вых усилителя 26 является выходом программатора 11 режимов давления. Блоки 14 и 15 умножения с перестраиваемыми коэффициентами управляемого коммутатора 12 реализованы на переменных резисторах делителей 27-30 напряжения с переменными коэффициентами деления, а его переклю чатель 16 - на полевых транзисторах 31-34 разной проводимости, образующих соответственно первый, второй и третий, четвертьй ключи, и диодах 35Устройство работает следующим об разом. Вдоль маршрутного кабеля 1 транс портное средство 3 начинает свое дв жение в режиме Движение вперед. При отклонении движущегося вперед транспортного средства 3 от маршрут ного кабеля 1 в передних и задних чувствительно-преобразующих элементах 4 и 5 выделяются напряжения раз ных знаков наведенных ЭДС, которые поступают на соответствукнцие лвходы сумматоров 6 и 7, формирунщих сигна лы разности, пропорциональные линей ным отклонениям соответственно пере ней и задней точек продольной оси транспортного средства 3 от кабеля 1, Ug g Ке, и и.Е КБ. ОдHOBpeJieHHo на входы сумматоры 9 поступают напряжения одинаковых знаков наведенных ЭДС передних чувстви тельно-преобразукяцих элементов 4, а на его выходе формируется напряжени суммы сигналов U величина ко- торой недостаточна для срабатывания компаратора 10, когда транспорт ное средство 3 движется вдоль маршрутного кабеля 1, Тогда на выходе компаратора 10 и соответственно на входе программатора 11 режимов двиIження отсутствуетсигнал индикации 2, т.е. и„„, 0. петли В этом случае программатор режимов движения управляет коммутатором с перестраиваемыми коэффициентами 12 следующим образом. Так как на вход счетчика-дешифра тора 23 фиг.2) еще не поступил сиг нал индикации петли 2, то процесс счета еще не начался, и, следовател но, на его первом выходе, а тем более и на всех последующих, присут584ствуют сигналы логического нуля. Тогда на инвертирующий вход операционного усилителя 26 поступает положительное напряжение логического нуля, которое по величине меньше положительного опорного напряжения. На выходе усилителя 26 без обратной связи сохраняется сигнал U g,, который поступает на вход блока 3 управ.ления электродвигателями ведущих неуправляемых колес и не меняет их вращение и на вход управляемого коммутатора 12 с перестраиваемыми коэффициентами, а именно на диоды 35-38. При этом на затворах транзисторов 31 и 32 образуются нулевые (отпиракнцие) потенциалы, а на затворах 33 и 34 - положительные потенциалы, которые запирают последние. В результате, сигнал U Кб проходит e,-f2 1 переменный резистор 27, изменяется в К раз и через первый ключ 31 поступает на неинвертирующий вход операционного сумматора 17, а сигнал К проходит переменный резистор 29, также изменяется в К раз и через второй дслюч 32 поступает на инвертирующий вход того же сумматоpfe 17. Следовательно, сигналы с выходов сумматоров 6 и 7 (фиг.1) проходят блок 14 умножения с требуемыми ко эффициентами и через нормально закрытые контакты переключателя 16 поступайт на входы сумматора 17, на выходе которого формируется сигнал углового отклонения UQ продольной оси транспортного средства 3 от кабеля 1, пропорциональный (при малых измене киях аргумента) разности линейных отклонений передней и задней точек продольной оси UQ ), который дифференцируется дифференциатором 18. При этом на соответствующие входы блока 19 управления непрерывно поступает информация о состоянии транспортного средства 3, движущегося вперед вдоль маршрутного кабеля 1, по линейному отклонению передней точки продольнбй оси К,, , угловому отклонении) продольной оси к, ( fj) скорости изменения углового отклонения K,d(,-f,)/dt. На выходе блока 19 управления формируется управляющий сигнал, который воздействует на исполнительный механизм 20 управляемых колес. В результате состояние транспортного 512 средства относительно кабеля дополняется непрерывной информацией по углу поворота управляемых колес и по скорости изменения этого угла, измеряемые потенциомерическим датчиком 21 и тахогенератором 22, которая также поступает на соответствующие входы блока 19 управления. Когда.движущееся вперед транспортное средство 3 въедет в петлю 2 индикации с усиленным в центральной части электромагнитным полем величины напряжений+U g , -U и Ug, чувствитель но-преобразующих элементов 4 резко возрастут, ирц этом разностный сигнал на выходе сумматора 6 не изменяется, а на выходе сумматора 9 сигнал суммы резко возрастает до величины срабатывания компаратора 10. На выходе последнего формируется сигнал индикации петли „на который поступает на вход программатора 11 режимов движения,а именно на вход счетчикадешифратора 23 (фиг.2), и на его пер вом выходе появляется сигнал счета в виде положительного напряжения логической единицы. Если первый тумблер задатчика 24 режимов будет в разомкнутом состояни что соответствует заданию двигаться дальше в режиме Движение вперед. то сигнал логической единицы не поступает на первый вход элемента ИЛИ 2 Следовательно, его состояние не из- меняется и соответственно не изменяется состояние программатора,-11 режи мов движения, управляемого коммутатора 12 и блока 13 управления электродвигателями ведущих колес. Если первый тумблер задатчика 24 40 ния режимов будет замкнут, что соответствует заданию в этой петле изменить направление движения и далее двигать ся в режиме Движение задним ходом, то сигнал- логической единицы чер.ез замкнутый первый тумблер задатчика режимов 24 поступает на первый вход элемента ИЛИ 25 и изменяет его состояние. При этом сигнал логической единицы с выхода элемента ИЛИ 25 поступает на инвертирующий вход операционного усилителя 26. И, так как опорное напряжение меньше напряжения логической единицы, на выходе операционного усилителя 26 формирует ся сигнал -Uqf, который поступает одновременно на вход блока 13 управления электродвигателями ведущих не8управляемых колес и изменяет их вращение на противоположное и на соответствующий вход управляемого коммутатора 12 с перестраиваемыми коэффициентами, а именно на диоды 35-38, Тогда на затворах транзисторов 33 и 34 образуются отпирающие потенциалы, а на затворах транзисторов 31 и 32 - запирающие. Так как состояние транзисторов 33 и 34 изменяет коэффициенты деления делителей 27-30 напряжения - сигнал Up , К, про- ходит часть переменного резистора 27, изменяется в К раза и через третий ключ 33 поступает на инвертирующий вход сумматора 17, а .сигнал р,с проходит часть переменного резистора 29, также изменяется в К, ра- за и через четвертый ключ 34 поступает на неинвертирующий вход того же сумматора, Следовательно, сигналы с выходов сумматоров 6 и 7 (фиг.1) проходят .. блоки 15 умножения с требуемыми коэффициентами и через нормально от-. крытые контакты переключателя 16 лоступают на входы сумматора 17, на выходе которого формируется сигнал U0 K(), поступающий на вход дифференциатора 18. При этом на соответствующие входы блока 19 управления непрерывно поступает информация о состоянии транспортного средства 3, движущегося назад вдоль маршрутного кабеля 1, с требуемыми коэффициентами и знаками, а именно , ,) и )/dt, которая дополняется в процессе автоматического управледвижением сигналами угла поворота управляемых колес и скоростью изменения этого угла. В соответствии с заданным логи- ческим законом управления блок 19 управления устраняет с требуемой точностью любые изменения в состоянии транспортного средства, движущегося как вперед, так и задним ходом вдоль маршрутного кабеля, возникающие в результате внешних и параметрических возмущений: изменения скорости движения, положения центра масс в режиме движения вперед и зад«им хГодом, износ и изменения прлоэсёния колесньпс осей в режиме вперед и задним ходом, неровностей дороги и другие.
7 .
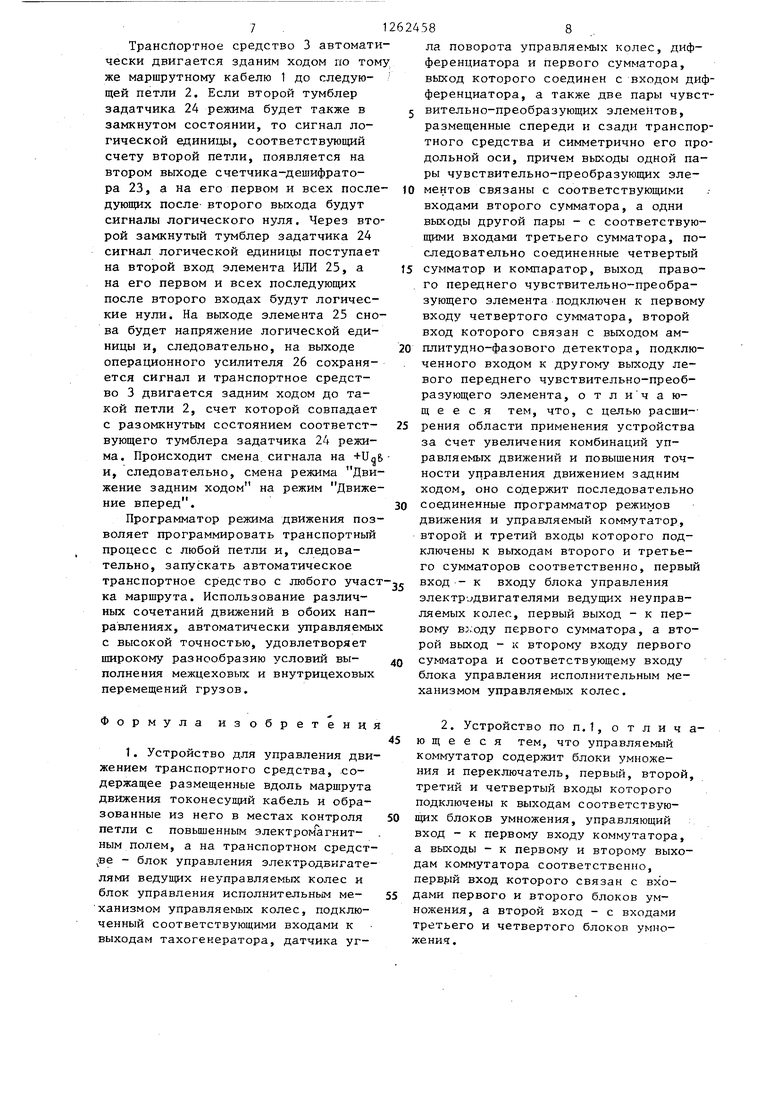
Транспортное средство 3 автоматически двигается зданим ходом по том же маршрутному кабелю 1 до следующей петли 2. Если второй тумблер задатчика 24 режима будет также в замкнутом состоянии, то сигнал логической единицы, соответствующий счету второй петли, появляется на втором выходе счетчика-дешифратора 23, а на его первом и всех после дующих после- второго выхода будут сигналы логического нуля. Через второй замкнутый тумблер задатчика 24 сигнал логической единицы поступает на второй вход элемента ИЛИ 25, а на его первом и всех последующих после второго входах будут логические нули. На выходе элемента 25 снова будет напряжение логической единицы и, следовательно, на выходе операционного усилителя 26 сохраняется сигнал и транспортное средство 3 двигается задним ходом до такой петли 2, счет которой совпадает с разомкнутым состоянием соответствующего тумблера задатчика 24 режима. Происходит смена сигнала на и, следовательно, смена режима Движение задним ходом на режим Движение вперед.
Программатор режима движения позволяет программировать транспортный процесс с любой петли и, следовательно, запускать автоматическое транспортное средство с любого участка маршрута. Использование различных сочетаний движений в обоих направлениях, автоматически управляемых с высокой точностью, удовлетворяет широкому разнообразию условий выполнения межцеховых и внутрицеховых перемещений грузов. Формула изобретени 1. Устройство для управления дви жением транспортного средства, содержащее размещенные вдоль маршрута движения токонесущий кабель и образованные из него в местах контроля петли с повышенным электромЪгнитным полем, а на транспортном средст ве - блок управления электродвигате лями ведущих неуправляемых колес и блок управления исполнительньом механизмом управляемых колес, подключенный соответствующими входами к выходам тахогенератора, датчика угла поворота управляемых колес, дифференциатора и первого сумматора, выход которого соединен с входом диференциатора, а также две пары чувсвительно-преобразующих элементов, размещенные спереди и сзади транспотного средства и симметрично его прдольной оси, причем выходы одной пары чувствительно-преобразующих элементов связаны с соответствующими входами второго сумматора, а одни выходы другой пары - с соответствующими входами третьего сумматора, последовательно соединенные четвертый сумматор и компаратор, выход правого переднего чувствительно-преобразующего элемента подключен к первому входу четвертого сумматора, второй вход которого связан с выходом амплитудно-фазового детектора, подключенного входом к другому выходу левого переднего чувствительно-преобразующего элемента, о т л ич а ющ е е с я тем, что, с целью расши-рения области применения устройства за Счет увеличения комбинаций управляемых движений и повышения точности управления движением задним ходом, оно содержит последовательно соединенные программатор режимов движения и управляемый коммутатор, второй И третий входы которого подключены к выходам второго и третьего сумматоров соответственно, первый вход - к входу блока управления электр.;двигателями ведущих неуправляемых колес, первый выход - к первому в.оду первого сумматора, а второй выход - 1C второму входу первого сумматора и соответствующему входу блока управления исполнительным механизмом управляемых колес. 2. Устройство по п.1, о т л и ч аю щ е е с я тем, что управляемый коммутатор содержит блоки умножения и переключатель, первый, второй, третий и четвертый входы которого подключены к выходам соответствующих блоков умножения, управляющий вход - к первому входу коммутатора, а выходы - к первому и второму выходам коммутатора соответственно, перв{,1й вход которого связан с входами первого и второго блоков умножения, а второй вход - с входами третьего и четвертого блоков умноженияг. 912 3, Устройство по п. 1, о т л и чающееся тем, что програм.матор режимов движения содержит Последовательно соединенные счетчикдешифратор, задатчик режимов и эле мент ИЛИ, а также усилитель, инвер6245810. тирующий вход которого подключен к выходу элемента ИЛИ, «еинвертирующий вход - к источнику опорного сигнала, а выход - к выходу программатора, s вход которого связан с входом счетчика-дешифратора.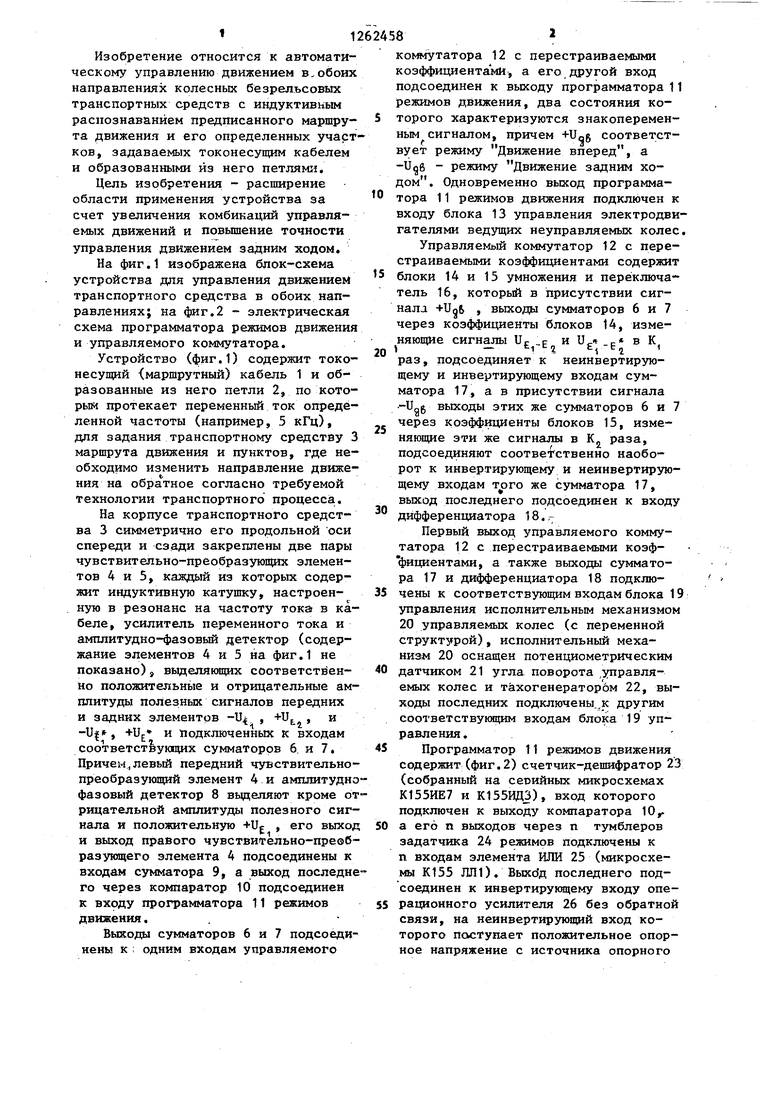
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управления выбором маршрута автоматически движущимся транспортным средством | 1980 |
|
SU945031A1 |
| Устройство для управления движением автоматического транспорта | 1986 |
|
SU1320828A2 |
| Устройство для управления автоматически движущимся по заданному маршруту транспортным средтвом | 1984 |
|
SU1202982A1 |
| Устройство для управления движениемАВТОМАТичЕСКОгО ТРАНСпОРТА | 1979 |
|
SU830493A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2160929C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Устройство для оценки мастерства вождения транспортных средств | 1989 |
|
SU1622889A1 |
| Устройство для контроля движения транспортных средств | 1980 |
|
SU898477A1 |
Изобретение относится к устройствам для автоматического управления движением в обоих направлениях по одному и тому же маршруту колесных безрельсовых транспортных средств или транспортных роботов с индуктивным распознаванием маршрута движения.. Цель изобретения - расширение области применения устройства за счет увеличения комбинаций управляемых движений и повышение точности управления движением заднего хода. Дл достижения цели в устройство введены программатор режимов движения, подключенный к выходу компаратора, обнаруживаннцего nymctju изменения направления движения - петли индикации. Введен коммутатор с перестраиваемыми коэффициентами измерительных каналов индуктивного распознавания маршрута, управляемый программатором режима движения. В зависимости от режима движения вперед или задним ходом блок управления движением с переменной структурой получает непрерывную информацию о состоянии транспортного (Л средства относительно маршрутного кабеля по всем координатам, причем с: с выходов индуктивных измерительных каналов с требуемыми коэффициентами и знаками, учитывающими изменение ° динамических свойств транспортного ю .средства при изменении направления о:) движения. 2 з.,п. ф-лы, 2 ил. ю ел СХ)
Фиг.1
| Устройство автоматического управления движением транспортного средства | 1973 |
|
SU471872A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
