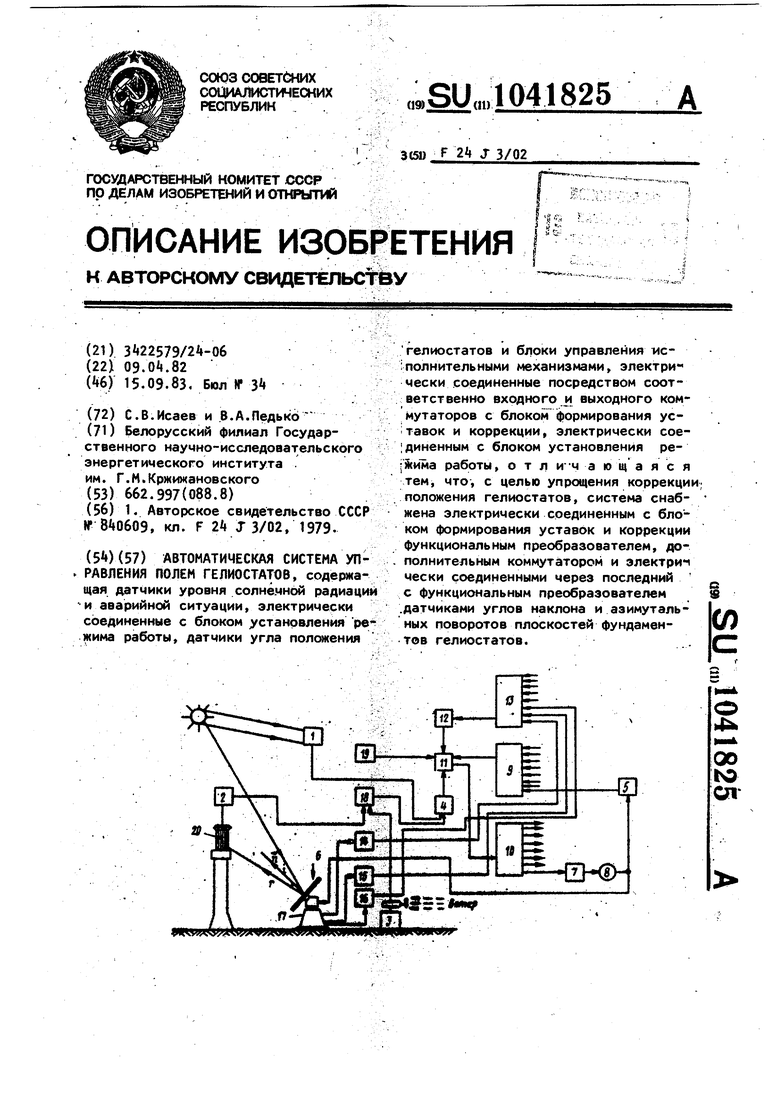
Изобретение относится к гелиотех нике, в частности к автоматическим системам управления полем гелиостатов солнечных электростанций башенного типа. Известна автоматическая система управления полем гелиостатов, содер жащая датчики уровня солнечной ради ции и аварийной ситуации, электриче ки соединенные с блоком устаноаления режима работы, датчики угла пол кения гелиостатов и блоки управления исполнительными механизмами, электрически соединенные посредство соответственно входного и выходного коммутаторов с блоком формирования уставок и коррекций , электрически соединенным с блоком установления режима работы. В этой автоматической системе управления коррекции положения каждого гелиостата осуществляется с помощью общего приемника-излучателя , установленного на башне солнечной электростанции,по отраженному лазерному лучу fl J Наличие приемника-излучателя, сп циальных датчиков на гелиостатах и необходимость организации сложного режима коррекции, действуюи1его огра ниченное время, усложняют автоматическую систему управления полем гелиостатов. Целью изобретения является упрощ ние коррекции положения гелиостатов., Поставленная цель достигается тем, что автоматическая система управления полем гелиостатов, содержа щая датчики уровня солнечной радиации и аварийной ситуации, электриче ки соединенные с блоком установления режима работы, датчики/угла пол жения гелиостатов и блоки управления исполнительными механизмами, электрически соединенные посредство соответственно -входного и выходного коммутаторов с блоком формирования уставок и коррекции, электрически соединенным с блоком установления режима работы, снабжена электрически соединенным с блоком формировани уставок и коррекции функциональным преобразователем, дополнительным коммутатором и электрически соединенными через последний с функциск нальным преобразователем датчиками углов наклона и азимутальных поворотов плоскостей фундаментов гелиостатов. На чертеже показана функциональная схема автоматической системы управления полем гелиостатов. Схема содержит датчик 1 уровня солнечной радиации и датчики 2 и 3 аварийной ситуации по состоянию оборудования и метеоусловиям соответственно, электрически соединенные с блоком Ц установления режима работы, датчик и 5 угла поворота гелиостатов 6 и блоки 7 управления исполнительными механизмами 8, электри.чески соединенные прсредством соответственно входного 9 и выходного 10 коммутаторов с блоков 11 формирования уставок и коррекции,э лектрически соединенным с блоком 4 установления режима работы. Автоматическая система управления полем гелиостатов 6 снабжена электрически соединенным с блоком 11 формирования уставок и коррекции функциональным преобразователем 12, дополнительным коммутатором 13 и элект рически соединенными через последний с функциональным перобразователем 12 датчиками 1А и 15 углов наклона и датчиками 16 азимутальных поворотов плоскостей фундаментов 17 гелиостатов 6. Датчики 2 и 3 подключены к входам блока 18 установки флага Аварийная ситуация, выдающего соответствующий код на вход блока k установления режима работы. Автоматическая система снабжена таймером 19, электрически соединенным с блоком 11 формирования уставок и коррекции. Датчик 5 угла по ворота каждого гелиостата. 6 установлен на валу соответствующего исполнительного механизма 8. В качестве датчиков 1 и 15 углов наклона плоскостей фундаментов 17 может быть использован магнитожидкостной детектор уровня, содержащий цилиндрический сосуд и датчик магнитного потока,, размещенный в сосуде, реагирующий на изменение ма.гнитного поля в результате смещения сосуда и позволяющий выявить направление и величину ухода контролируемой величины. Датчики 1 и 15 установлены на i плоскости фундамента 17 в двух взаимно перпендикулярных направлениях. Датчик 16 азимутального поворота плоскости фундамента 17 выполнен в виде электрокомпаса,стрелка которого является подвижным контактом реохорда и направлена строго в одном на- i правлении север-юг, а корпус жестко закреплен на фундаменте 17.
Функциональный преобразователь 12 может быть реализован на АЦП типа tSSl.
Функции выходного коммутатора 10 и блоков 7 управления исполнительныMVI механизмами 8-могут .быть реализованы в оптронном коммутаторе, позволяющем управлять одновременно восьмью исполнительными механизмами 8, котог ;рыми служат шаговые электродвигатели типа Ш-2, 65/50-01, .
Датчик 5 угла поворота гелиостата 6 может быть реализован датчиком круговых перемещений ВЕ-51В.
На функциональной схеме таже показана башня с котлом 20 парогенератора.
Автоматическая система работает следующим образом.
Система может работать в двух основных режимах. Режимы работы системы задаются блоком в соответствии с кодограммой, представленной в таблице.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управленияпОлЕМ гЕлиОСТАТОВ | 1979 |
|
SU840609A1 |
| Система управления гелиостатом | 1990 |
|
SU1784100A3 |
| Автоматическая система управления гелиостатом | 1990 |
|
SU1763814A1 |
| Система управления гелиостатами | 1982 |
|
SU1149210A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Устройство управления электродвигателями | 1981 |
|
SU1081621A1 |
| Автоматическая система управления гелиостатом | 1989 |
|
SU1695065A1 |
| Автоматическая система управ-лЕНия гЕлиОСТАТОМ | 1979 |
|
SU800516A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ СОЛНЕЧНОГО ЭНЕРГОМОДУЛЯ | 2007 |
|
RU2381426C2 |
| Гелиокомплекс | 1983 |
|
SU1147900A1 |
Аварийная ситуация по метеоусловиям
Налимие сигнала Коррекция
Если отсутствует сигнал о возникновении аварийной ситуации Гблок 18 выдает код 000J, то система работает в первом основном режиме. В этом случае по сигналу от датчика 1 уровня солнечной радиации, поступающему в блок j, последним выдается сигнал в блок 11 о начале работы системы в первом режиме. Блоком 11 производится сравнение текущего значения датчика 5 угла поворота гелиостата 6 с требуемым значением для данного времени суток и вырабатывается сигнал соответствующего воздействия , который через выходной коммутатор 10 поступает на блок 7 управления исполнитель-/ ным механизмом 8 соответствующего гелиостата 6. Гелиостат 6 в этом режиме продолжает движение по расчетной траектории за Солнцем. Перевод гелиостата в положение утра следу..ющего дня производится по сигналу с датчика 1 уровня солнечной радиации;
Датчики 1А и 15 угла наклона пЛоскости фундамента 17 гелиостата 6, установленные на фундаменте 17, служат для внесения поправок в управлеКонец работы системы Начало работы системы
Аварийная ситуация по состоянию оборудования
ние движением гелиостата 6 в случае ухода фундамента 17 гелиостата 6, что может привести к значительному снижению точности слежения за Солнцем.
Слежение за Солнцем происходит по уставкам, выдаваемым блоком 11, рассчитывающим уравнения движения гелиостатов 6:
-Sinot-COS0. + Sf ПС1,СО31
2- --cos cos « csoe а. cos fi
и;
COSot COse C05CX C09h
где ft азимутальный угол поворота; I Z - зенитальный угол поворота;
Gl - угол между меридианом и гори: зоитальной проекцией падающего луча;
. oL- - угол между меридианом и горизонтальной проекцией отраженного луча;
в| - угол между отраженным лучом J и горизонтальной плоскостью; h - угловая высота Солнца.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
