Изобретение относится к гелиотехнике, в частности к гелиокомплексам в виде солнечных энергетических станций башениого типа, имеющих систему управления полем гелиостатов от единого датчика положения Солнца.
Известен гелиокрмплекс, содержащий центральный приемник излучения, гелиостаты с приводами и датчиками положения, азимутально-зенитальный датчик положения Солнца и систему управления, электрически соединенную с последним, датчики положения и приводами каждого гелиостата.
В этом гелиокомплексе азимутально-зенитальным датчиком положения Солнца служит образцовый гелиостат, ориентируемый на Солнце, а система управления снабжена ЭВМ, вырабатывающей индивидуальные сигналы, управления каждым гелиостатом 1.
Наличие ЭВМ требует квалифицированного регламентного обслуживания и выявления возможных отказов в ее узлах.
Цель изобретения - повышение эксплуатационной надежности гелиокомплекса.
Поставленная цель достигается тем, что в гелиокомплексе, содержащем центральный приемник излучения, гелиостаты с приводами и датчиками положения, азимутально-зенитальный датчик положения Солнца и систему управления, электрически соединенную с последним датчиками положения и приводами каждого гелиостата, система управления снабжена коммутатором, блоками сравнения, дополнительными приводами и датчиками положения и механическими узлами пересчета координат, каждый из которых выполнен в виде системы кинематически связанных элементов, включающей ориентированный на центральный приемник излучения неподвижный стержень, расположенный к нему под углом и кинематически связанный с двумя дополнительными приводами подвижный опорный стержень, и служащий биссектрисой угла между опорным и неподвижным стержнями ведомый стержень, кинематически связанный с двумя дополнительными датчиками положения, причем все датчики положения электрически соединены с блоками сравнения, электрически связанными с приводами гелиостатов, а датчик положения Солнца электрически соединен со всеми дополнительными приводами через коммутатор.
На фиг. 1 показана структурная схема гелиокомплекса, на фиг. 2 - сечение механического узла пересчета координат с двумя дополнительными приводами и двумя датчиками положения; на фиг. 3 - сечение, механического узла пересчета координат в плоскости, перпендикулярной плоскости сечения по фиг. 2; на фиг. 4 - электрическая схема блока сравнения; на фиг. 5 - электрическая схема коммутатора; на фиг. 6 .- закон изменения емкостей датчиков положения в азимутальном канале управления; на фиг. 7 - закон изменения емкостей датчиков положения в зенитальном канале управления.
Гелиокомплекс содержит центральный приемник 1 (фиг. 1) излучения, гелиостаты 2 с приводами 3 и 4 и датчиками положения 5 и 6 соответственно, азимутальнозенитальный датчик 7 положения Солнца и систему 8 управления, электрически соединенную с последним датчиками 5 и 6 положения и приводами 3 и 4 каждого гелиостата 2.
Система 8 управления снабжена коммутатором 9, блоками 10 сравнения, дополнительными приводами Ни 12 (фиг. 2 и 3) и дополнительными датчиками 13 и 14 соответственно и механическими узлами 15 пересчета координат, каждый из которых выполнен в виде системы 16 кинематически связанных элементов, включающей ориентированный на центральный приёмник 1 излучения неподвижный стержень 17, расположенный к нему под углом и кинематически связанный с двумя дополнительными приводами 11 и 12 подвижный опорный стержень 18 и служащий биссектрисой угла между опорным и неподвижным стержнями 18 и 17 соответственно ведомый стержень 19, кинематически связанный с двумя дополнительными датчиками 13 и 14 положения, причем все датчики 5, 6 и 13, 14 электрически соединены с блоками ,10 (фиг. 1 и 4) сравнения, электрически связанными с приводами 3 и 4 гелиостатов 2, а датчик 7 (фиг. 1) положения Солнца электрически соединен со всеми дополнительными приводами 11 и 12 через коммутатор 9 (фиг. 5).
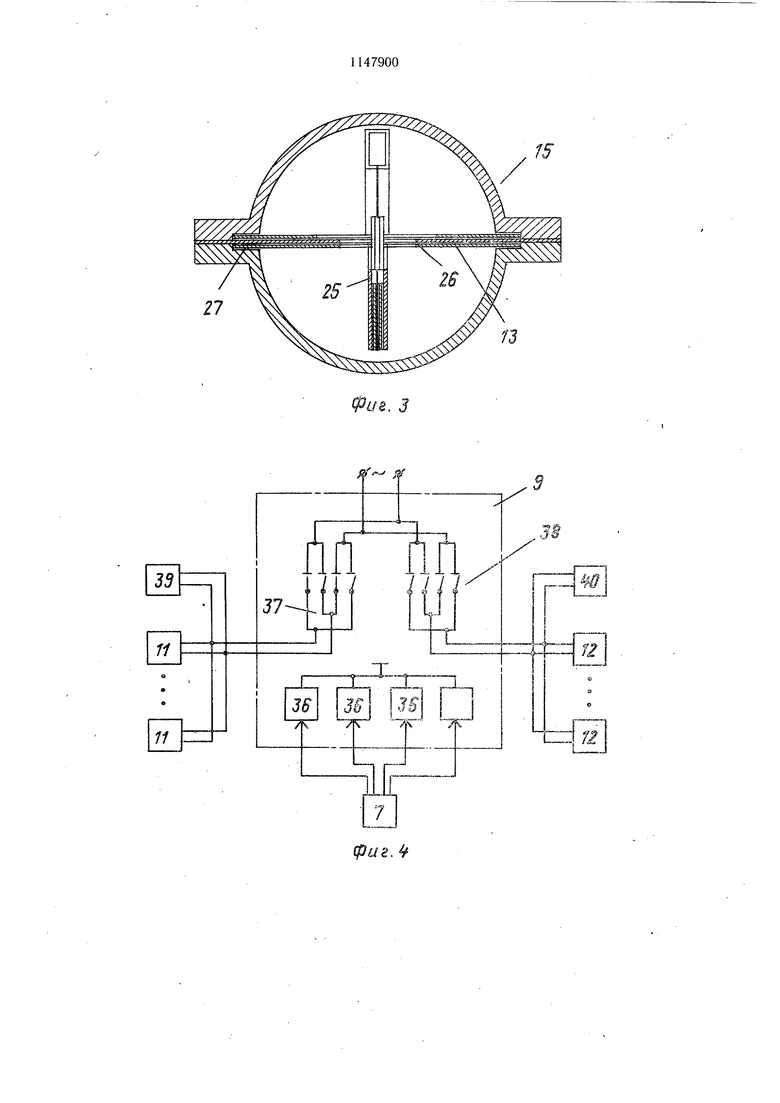
5 Неподвижный стержень 17 закреплен в устройстве 20 (фиг. 2) с возможностью вращения вокруг собственной оси.
Дополнительный привод 11 азимутального канала управления связан с пластиной
0 21 и поворачивает ее с помощью роликов 22. На пластине 21 установлен полый короб 23, внутри которого перемещается дополнительный привод 12 зенитального канала управления, закрепленный на опорном стержне 18. На ведомом стержне 19 установлена
5 пластина 24, выполненная в виде сегмента. Она может перемещаться в вертикальной плоскости внутри полого короба 25 (фиг. 3), установленного на пластине 26, вращающейся на роликах 27, и поворачивать пластину 26. Поворот пластины 26 относительно пластины 24 определяет местный азимутальный угол, а поворот пластины 24 относительно вертикальной оси - местный зенитальный угол. Эти углы измеряются емкостными датчиками.
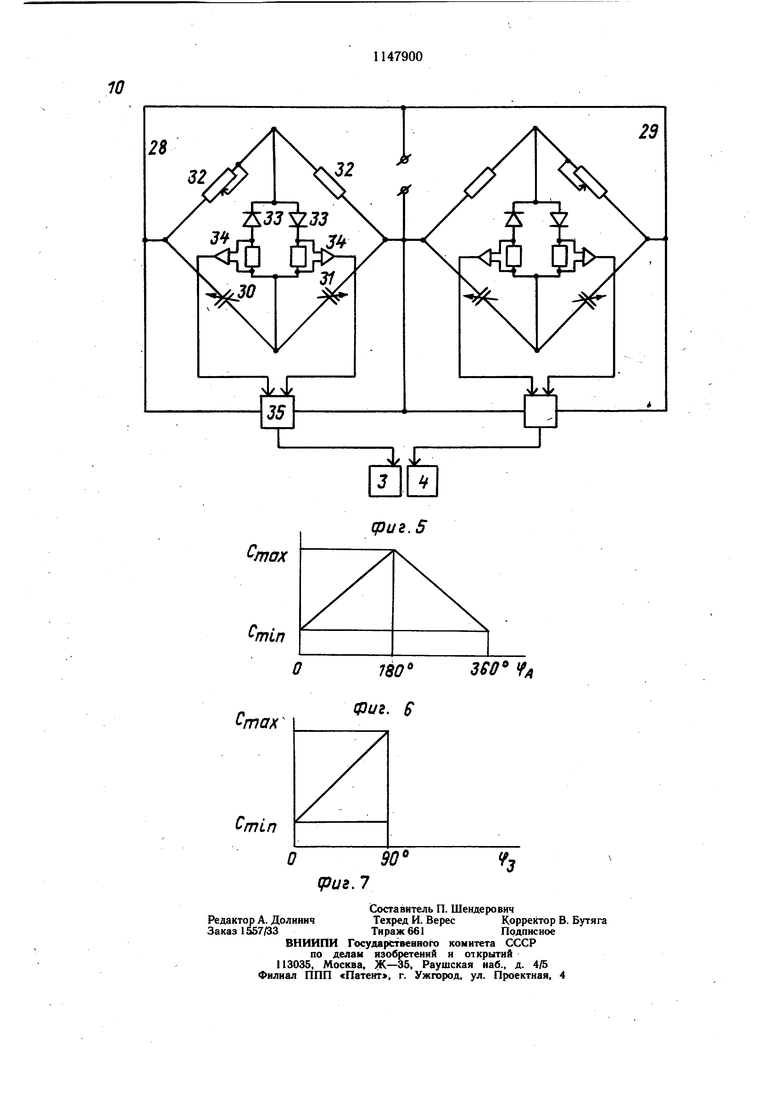
На неподвижной пластине 24 устанавливается одна обкладка емкости, а на поворотной пластине 26 - другая обкладка емкости, занимающие лишь половину площади пластин 26 и 24, что позволяет изменять емкость от Camin ДО Сотах (фиГ. 6) В диапазоне угла азимутального поворота Фа 0-360°. В зенитальном канале управления обкладки емкости располагаются на внутренней поверхности короба 25 и на всей площади пластины 24, позволяя изменить емкости от Сзтоп ДО (фиг. 7) в диапазоне угла зенитального поворота фз 0-90°. Блок 10 сравнения (фиг. 4) состоит издвух идентичных частей 28 и 29 для азимутального и зенитального каналов управления соответственно построенных по мостовой схеме. Часть 28 включает емкости 30 и 31, резисторы 32, диоды 33 и компараторы 34, причем емкость 30 образуется обкладками на пластинах 26 и 24 механического узла 15 пересчета координат, а емкость 31 датчикрм 5 положения гелиостата 2. Компараторы34 соединены с усилителем 35, коммутирующим питание переменного напряжения на фазы привода 3 гелиостата 2. Часть 29 управляет приводом 4 гелиостата 2. Датчик 7 (фиг. I) положения Солнца выполнен на основе светочувствительного датчика с фотоэлементами и имеет четыре выхода: по два на каждый канал управления, вырабатывающих сигналы противоположной полярности. Коммутатор 9 (фиг. 5) имеет соответственно четыре реле 36 с контактными группами 37 и 38 каналов азимутального и зенитального управления. Датчик 7 (фиг. 1) положения Солнца имеет азимутальный и зенитальнь1й приводы 39 и 40 соответственно. Гелиокомплекс работает следующим образом. Перед началом работы производят на,стройку системы 8 управления (фиг. 1). Для этого в соответствии с сигналом датчика 7
15
16
сриг.2
23 положения Солнца в каждом канале управления выставляют механические узлы 15 (фиг. 2) аересчета координат и каждый гелиостат 2 (фиг. 1) в положения, обеспечивающие нулевой выходной сигнал с соответствующих блоков 10 (фиг. 4) сравнения. После чего система 8 (фиг. 1) управления включается в работу. Перемещение Солнца, например, в азимутальной плоскости слежения приводит к засветке одного из фотоэлементов датчика 7, и сигнал с его выхода поступит на одно из реле 36 коммутатора 9 (фиг. 5), вызвав срабатывание в данном случае контактной группы 37. При этом будет подано питание от источника переменного тока (напряжение) на азимутальный привод 39 датчика 7 и дополнительные азимутальные приводы 11 узлов 15 пересчета координат. Соответствующее перемещение опорного и ведомого стержней 18 и 19 (фиг. 2 и 3) каждого узла 15 и связанное с этим изменение емкостей 30 (фиг. 4) в блоках 10 сравнения приводит к срабатыванию компараторов 34 последних и подаче напряжения питания к азимутальному приводу 3 (фиг. 1) каждого гелиостата 2. Перемещение гелиостатов 2 будет происходить до момента прекращения засветки фотоэлемента датчика 7 в азимутальном канале управления. Аналогично происходит работа системы 8 управления и при возникновении сигнала в зенитальном канале. Замена электронного 1вБ1чиелктеля-п®Ложения каждого гелиостата 2 при слежении за Солнцем с отражением излучения на центральный приемник 1 излучения на механические узлы 15 пересчета координат позволяет повысить надёжность эксплуатации, упростить регламентное обслуживание и удешевить систему 8 управления гелиокомплексом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гелиокомплекс | 1983 |
|
SU1141274A1 |
| Устройство для слежения гелиоустановки за Солнцем | 1989 |
|
SU1728596A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ СОЛНЕЧНОГО ЭНЕРГОМОДУЛЯ | 2007 |
|
RU2381426C2 |
| Гелиостат | 1980 |
|
SU890035A1 |
| Система управления гелиостатом | 1983 |
|
SU1147901A1 |
| Стенд для исследования зеркал | 1984 |
|
SU1177601A1 |
| Система управления гелиостатом | 1985 |
|
SU1305505A2 |
| Автоматическая система управления полем гелиостатов | 1982 |
|
SU1041825A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАТФОРМОЙ КОНЦЕНТРАТОРНЫХ СОЛНЕЧНЫХ МОДУЛЕЙ | 2015 |
|
RU2611571C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ И СЛЕЖЕНИЯ ЗА СОЛНЦЕМ КОНЦЕНТРАТОРНОЙ ФОТОЭНЕРГОУСТАНОВКИ | 2014 |
|
RU2579169C1 |
ГЕЛИОКОМПЛЕКС, содержащий центральный приемник излучения, гелиостаты с приводами и датчиками положения, азимутально-зенитальный датчик положения Солнца и систему управления, электрически соединенную с последним датчиками положения и приводами каждого гелиостата, отличающийся тем, что, с целью повышения эксплуатационной надежности, система управления снабжена коммутатором, блоками сравнения, дополнительными приводами и датчиками .положения и механическими узлами пересчета координат, каждый из которых выполнен в виде системы кинематически связанных элементов, включающий ориентированный на центральный приемник излучения неподвижный стержень, расположенный к нему под углом и кинематически связанный с двумя дополнительными приводами подвижный опорный стержень и служащий биссектрисой угла между опорным и неподвижным стержнями ведомый стержень, кинематически связанный с двумя дополнительными датчиками положения, причем все датчики положения электрически соединены с блоками сравнения, электрически связанными с приводами гелиостатов, а датчик положения Солнца электрически соединен со всеми дополнительными приводами через коммутатор. Ю СО (риг. 7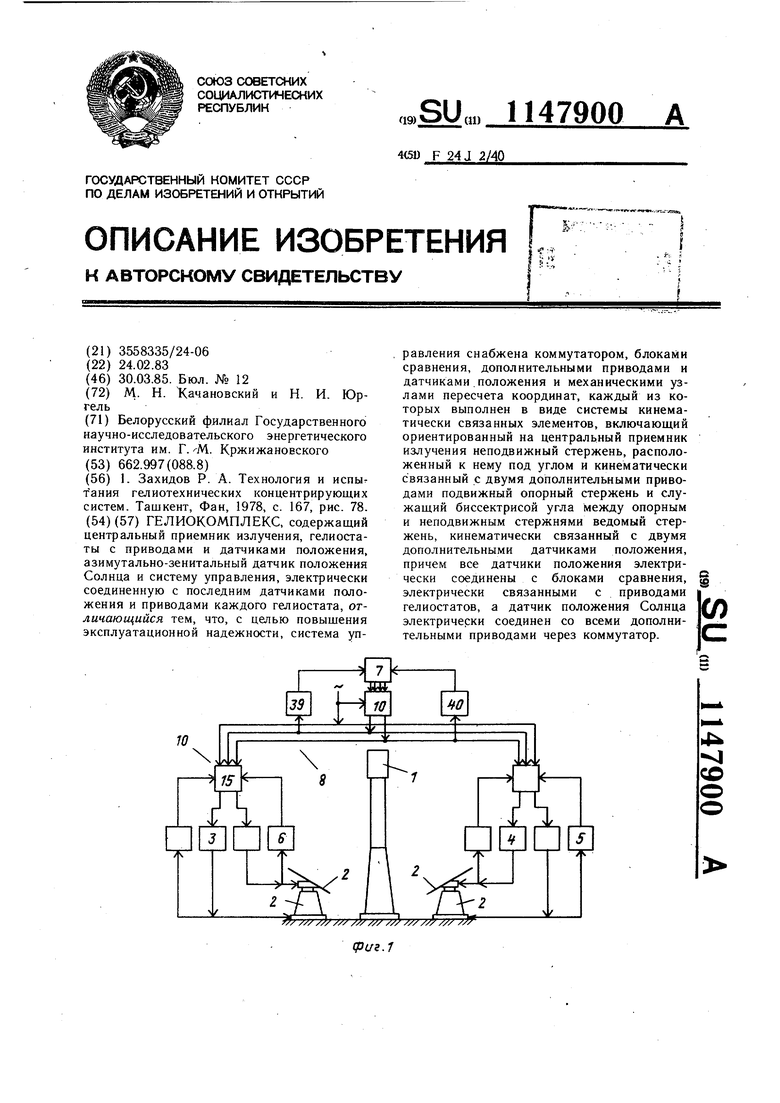
йГ
37,-iE:
U
/hr
max
tpuz.5
Sffff A
m
фиг. S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захидов Р | |||
| А | |||
| Технология и испы тания гелиотехнических концентрирующих систем | |||
| Ташкент, Фан, 1978, с | |||
| Прибор для запора стрелок | 1921 |
|
SU167A1 |
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
