. Изобретение относится к радиотехнике и предназначено для фильтрации результатов измерений двух функционально связанных параметров, например дальности и скорости, которые выргикены цифровым кодом.
По основному авт. св. № 813701 известен нелинейный цифровой фильтр, содержащий две цепи, каждая из которых состоит из последовательно соединенных блока сравнения, двустороннего ограничителя, сумматора и нерекурсивного фильтра, выход которого подключен к другим входам соответствукнаих ему блока сравнения и сумматора, а также блока оценки дисперсии измерений, вход которого подключен к выходу соответствующего ему двустороннего ограничителя, первый выход к входу соответствующего двустороннего ограничителя, а второй выход - к управляющим входам нерекурсивных фильтров, причем выход сумматора каждой из цепей подключен к другому сигнальному входу нерекурсивного фильтра другой цепи tl3.
Недос7атком устройства является относительно низкая точность фильтрации в условиях переменной во времени величины корреляционного момента.
Цель изобретения - повышЛие точности фильтрации.
Для достижения цели в нелинейный цифровой фильтр введены элемент ИЛИ, два блока запрета, перемножитель и дополнителвный нерекурсивный фильтр, причем к входам элемента ИЛИ подклю10чены дополнительные выходы двусторонних ограничителей, к выходу - управляющие входы блоков запрета, ин-формационный вход каждого из которых соединен с выходом соответствую15щего двустороннего ограничителя, к входам перемножителя подключены выходы блоков запрета, к выходу - вход дополнительного нерекурсивного фильтра, выход которого соединен с допол20нительными управляющими входами нерекурсивных фильтров. . .
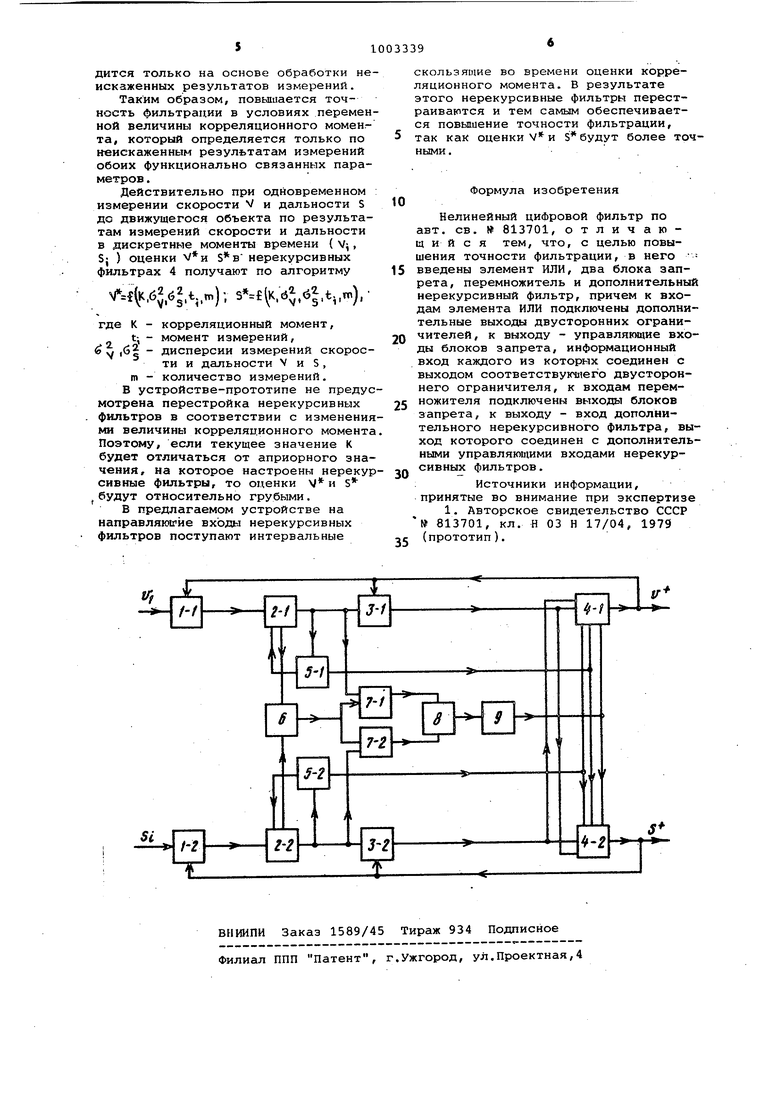
На чертеже представлена структурная электрическая схема нелинейного цифрового фильтра.
25
Нелинейный цифровой фильтр содержит две цепи, каждая из .которых состоит из последовательно соединенных блока 1-1 (1-2) сравнения, двустороннего ограничителя 2-1 (2-2 ), сумма30тора 3-1 (3-2 ), и нерекурсивного фильтра 4-1 (4-2 ), выход которого подключен к другим входам соответствующих ему блока 1-1 (1-2 ) сравн ния и сумматора 3-1 (3-2), а также блока 5-1 (5-2) оценки дисперсии и мерений, вход которого подключен к выходу соответствующего ему двусто роннего ограничителя 2-1 (2-2), пе вый выход -1 к входу соответствующе двустороннего ограничителя 2-1 (2второй выход - к управляющим входам нерекурсивных фильтров 4-1 (4-2), причем выход сумматора 3-1 (3-2),к дой из цепейподключен к другому сигнальному входу нерекурсивного фильтра 4-2 (4-1) другой цепи, а т же элемент ИЛИ 6, каждый из двух входов которого подключен к выходу соответствующего ему двустороннего ограничителя 2-1 и 2-2, а выход к управляющим входам двух блоков 7-1 и 7-2 запрета, информационный вход каждого иэ которых подключен к сигнальному выходу соответствующе го ему двустороннего ограничителя 2-1 (2-2), а выход - к последовательно соединенным перемножителю 8 дополнительному нерекурсивному филь ру 9, выход которого подключен к управляющим входам нерекурсивных фильтров 4-1 и 4-2. Устройство работает следующим об разом. В уртановленном режиме при отсут ствии аномальных искажений измеряемых параметров., а также при постоян ных дисперсиях ошибок измерений и корреляционном моменте результаты измерения скорости V и дальности 5 в.моменты времени t поступают на входы цифрового фильтра. Примем что измерения дальности Sj и скорос ти V в моменты времени t являются несметенными и проводятся с ошиб кой , характеризукя 1ейся дисперсиями б| и бу соответственно. При этом значения скорости V и S через соответствующие им блок 1(1-2)сраэнения, двусторонний ограни читель 2-1 (2-2), сумматор 3-1 (3-2 поступают на входы нерекурсивных ом фильтров 4-1 (4-2). На выходе нере курсивного фильтра 4-1 измерения ск рости У имеют скользящую оценку ск рости V, а на выходе нерекурсивного фильтра 4-2 измерения дальности Sj - оценку дальности S При этом в каждой цепи отрицательная обратная связь от нерекурсивного фильтра 4-1 (4-2) к блоку 1-1 (1-2) сравнения компенсируется положительной обратной связью от нерекурсивного фильтра 4-1 (4-2) к сумматору 3-1 (3-2). При появлении аномальных ошибок измерений двусторонний ограничитель 2-1 (2-2) ограничивает их сверху и снизу. Одновременно с этим с выхода двустороннего ограничителя 2-1 (2-2) сигнал поступает на вход блока 5-1 (5-2) оценки дисперсии измерений, в котором производится интервальная скользящая оценка дисперсии сяии-. бок измерений. Этот блок 5-1 (5-2) оценки может представлять собой последовательно соединенные квадратор и усилитель. Сигнал с выхода блока 5-1 (5-2) оценки подается на вход двустороннего ограничителя 2-1 (2-2) соответствующей цепи фильтрации и на входы нерекурсивных, фильтров 4-1 (4-2). Если дисперсии ошибок измерений изменяются, то изменяются в соответствии с этим и пороги ограничений ограничителей 2-1 (2-2), а также вносятся поправки в значения выходных сигналов генераторов стандартных сигналов нерекурсивных фильтров 4-1 (4-2), что. соответствует изменению постоянных коэффициентов, являющихся функцией 3|, d. К, t,- , где К - корреляционный момент, tj- текущий момент времени. Одновременно с этим сигналы с выходов двусторонних ограничителей 2-1 (2-2), равные () и (V--V) через нормально открытые блоки 7-1 (7-2) запрета поступают в перемножитель 8, на выходе которого образуются произведения 3- (S--S(. Сигналы с выхода перемножителя 8 поступают в дополнительный нерекурсивный фильтр 9, работающий в режиме скользяшего усреднения, на вы-, ходе которого образуется оценка корреляционного момента F- iгде m - число регистров нерекурсивного фильтра 9, Оценка К подается на управляющие входы нерекурсивных фильтров 4-1 и 4-2,-в результате чего происходит подстройка параметров фильтров и тем самым повышается точность фильтрации в условиях переменной величины корреляционного момента. В то же время, если сигнал на входе одного из двухсторонних ограничителей 2-1 и 2-2 будет превышать верхний порог ограничений или будет еньше нижнего порога ограничений, fo на выходе соответствующего двустороннего ограничителя 2-1 или 2-2 появляется сигнал, что соответствут аномальному искажению измеряемоо параметра. Сигнгш с выхода элеента ИЛИ 6 закрывает блоки 7-1 и 7-2 запрета, сигналы через которые выходов двусторонних ограничитеей 2-1 и 2-2 На входы перемножиеля 8 не поступают. Этим самым оцена корреляционного момента производится только на основе обработки неискаженных результатов измерений.
Таким образом, повьлиается точность фильтрации в условиях переменной величины корреляционного момен.та, который определяется только по неискаженным результатам измерений обоих функционально связанных параметров .
Действительно при одновременном : измерении скорости V и дальности S до движущегося объекта по результатам измерений скорости и дальности в дискретные моменты времени ( V, Sj ) оценки нерекурсивных фильтрах 4 получают по алгоритму
f(K,6;.62.t..n,); ,(5.t,,TT,),
где К - корреляционный момент,
t; - момент измерений, у ,б - дисперсии измерений скорости и дальности V и S, m - количество измерений. В устройстве-прототипе не предусмотрена перестройка нерекурсивных фильтров в соответствии с изменениями величины корреляционного момента. Поэтому, если текущее значение К будет отличаться от априорного значения, на которое настроены нерекурсивные фильтры, то оценки V и S будут относительно грубыми.
В предлагаемом устройстве на направлякягйе входы нерекурсивных ильтров поступают интервальные
скользящие во времени оценки корреляционного момента. В результате этого нерекурсивные фильтры перестраиваются и тем самым обеспечивается повыиение точности фильтрации, так как оценки V и S будут более точными.
Формула изобретения
Нелинейный цифровой фильтр по авт. св. 813701, отличающийся тем, что, с целью повышения точности фильтрации, в него введены элемент ИЛИ, два блока запрета, перемножитель и дополнительный нерекурсивный фильтр, причем к входам элемента ИЛИ подключены дополнительные выходы двусторонних ограничителей, к выходу - управлякнцие входы блоков запрета, информационный вход каждого из которых соединен с выходом соответствукчяего двустороннего ограничителя, к входам перемножителя подключены выходы блоков запрета, к выходу - вход дополнительного нерекурсивного фильтра, выход которого соединен с дополнительными управляющими входами нерекурсивных фильтров.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 813701, кл. Н 03 Н 17/04, 1979 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный цифровой фильтр | 1979 |
|
SU813701A2 |
| Цифровой рекурсивный фильтр | 1982 |
|
SU1046916A1 |
| Нелинейный цифровой фильтр | 1980 |
|
SU928614A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU871302A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU959267A1 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951654A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU987805A1 |
| Нелинейный цифровой фильтр | 1981 |
|
SU1042162A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU813702A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951653A2 |
