Изобретение относится к гидравлическим устройствам для перемещения исполнительных органов из одного положения в другое, в частности для позиционирования рабочих органов автоматических манипуляторов с программным управлением и металлорежущих станков.
Известен гидравлический дискретный привод, содержащий гидроцилинДр с поршнем, образующим рабочие полости, многопозиционный распределитель, управляемый щаговым элекродвигателем 1.
Недостатками данного привода являются сложность конструкции, невысокая надежность и недостаточное число точек позиционирования.
Известен также гидравлический дискретный привод, содержащий напорные и сливную гидролинии, гидроцилиндр и установленный в нем с образованием рабочих полостей поршень со штоками разных диаметров, четырехлинейный четырехпозиционный распределитель с двумя запертыми линиями в каждой позиции, сообщенный с напорными и сливной гидролиниями и рабочими полостями 2.
Однако при применении известного привода для позиционирования рабочих органов в устройствах со счетчиками импульсов или в системах с унитарным кодом, т.е. в системах без обратной связи по положению, не обеспечивается высокая точность позиционирования, так как величина шаговых перемещений, соответст вующая одному циклу многопозиционного распределителя, зависит от положения поршня по длине его хода внутри гидроцилиндра с.двусторонним штоком.
Применение известного дискретного привода для точного позиционирования рабочих органов совместно с датчиками пбложения, осуществляющими обратную связь, существенно усложняет и удорожает устройство позиционирования.
Цель изобретения - расширение функциональных возможностей устройства.
Поставленная цель достигается тем, что гидравлический дискретньш привод, содержащий напорную и сливную гидролинии, гидроцилиндр и установленный в нем с образованием рабочих полостей поршень со штоками разных диаметров, реверсивный распределитель -и четырехлинейный четырехпозиционный распределитель с двумя запертыми линиями в каждой позиции, сообщенный с напорной и сливной гидролиниями и рабочими полостями, снабжен дозатором с управляющим устройством и камерой, сообщенной через дополнительную линию четырехпозицйонного распределителя в его третьей и четвертой позиции с рабочими полостями.
Кроме того, управляющее устройство дозатора выполнено в виде последовательно установленных в управляющей камере
тарельчатых пружин с регулируемой, степенью сжатия, а управляющая камера сообщена с дополнительной управляющей линией.
При этом управляющая линия дополнительно сообщена с рабочей полостью, с проходящим через нее штоком меньшего диаметра через дроссель.
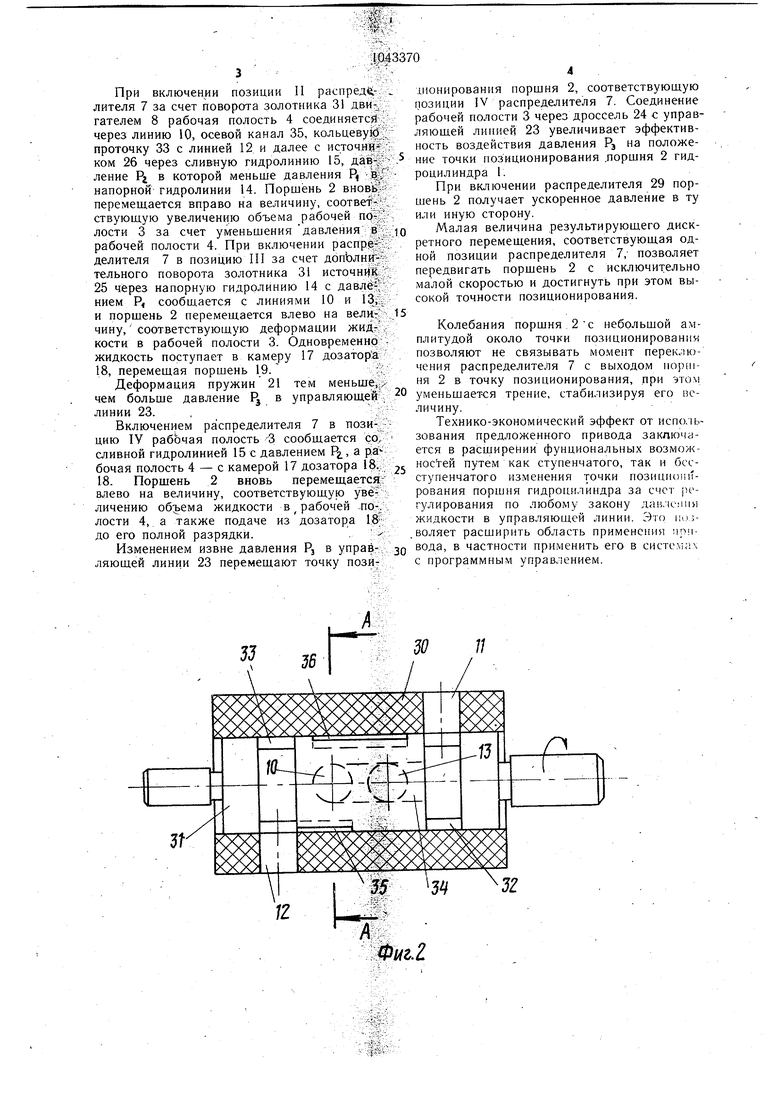
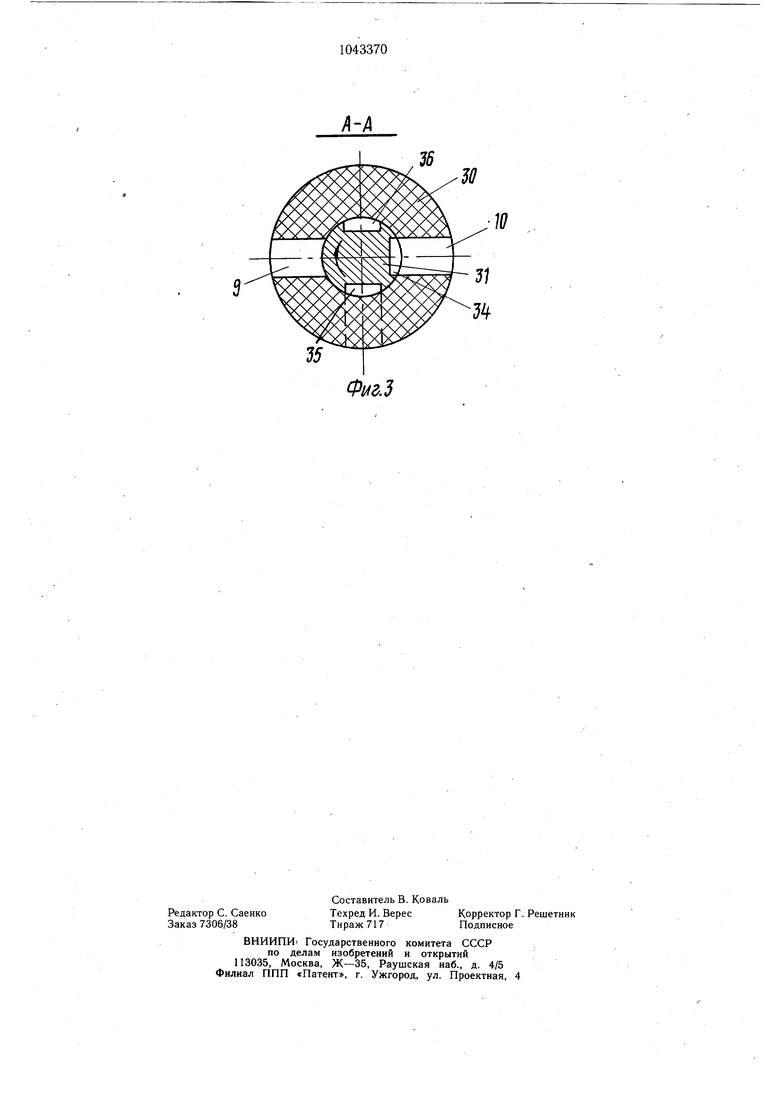
На фиг. 1 представлена принципиальная схема гидравлического дискретного привода; на фиг. 2 - один из возможных вариантов выполнения четырехпозицйонного распределителя; на фиг. 3 - разрез А-А на фиг. 2.
Гидравлический дискретный привод (фиг. 1) содержит гидроцилиндр 1 с установленным внем поршнем 2 с образованием рабочих полостей 3 и 4, через которые проходят штоки 5 и 6 разных диаметров, четырехпозиционный распределитель 7, приводимый в действ,ие приводным щаговым двигателем 8, связанный основными линиями 9-12 и дополнительной линией 13 соответственно с рабочими полостями 3 и 4, н апорной 14 и сливной 15 гидролиниями сообщенными со сливной магистралью 16, а такжес камерой 17 дозатора 18, включающего поршень 19 и управляющее устройство, выполненное в виде последовательно установленных в управляющей камере 20 тарельчатых пружин 21 с устройством 22 регулировки степени сжатия. Управлянэщая камера 20 сообщена с управляющей
Q линией 23 и через дроссель 24 - с рабочей полостью 3, а ндпорная 14 и сливная 15 гидролинии - с соответствующими источниками 25 и 26 гидравлической энергии. Максимальное рабочее давление в напорной 14 и сливной гидролиниях поддерживается независимыми предохранительными клапанами 27 и 28. Кроме того, привод содержит реверсивный распределитель 29. Позиции I-IV распределителя 7 последовательно чередуются слева направо.
Распределитель 7 может быть выполнен (фиг. 2 и 3) в виде установленного в непс)движном корпусе 30 поворотного золотника 31, на котором выполнены кольцевые проточки 32 и 33, осевые каналы 34 и 35 и,осевая проточка 36.
Гидравлический дискретный привод работает следующим образом.
В исходном положении (фиг. 1) распределитель 7 установлен в позицию 1, распределитель 29 обесточен и находится в среднем положении. Рабочая среда от источника 25 по напорной гидролинии 14, линии 11, кольцевой проточке 32 (фиг. 2 и 3), осевому каналу 34 поступает .в линию 9 и далее в рабочую полость 3. Линии 10. 12 и 13 перекрыты корпусом 30 и золотником 31. Поршень 2 перемещается вправо (фиг. 1) на величину, соответствующую деформации жидкости в рабочей полости 4. При включении позиции II распределителя 7 за счет поворота золотника 31 дви- гателем 8 рабочая полость 4 соединяется через линию 10, осевой канал 35, кольцеву1б проточку 33 с линией 12 и далее с источай IJ - ..ж...,1,11 А Г1 лл.ии1. rl lsj-lAlli КОМ 26 через сливную гидролинию 15, дав-ление Pj в которой меньще давления Р, 1 напорной гидролинии 14. Порщёнь 2 вновй перемещается вправо на величину, соответствующую увеличению объема рабочей полости 3 за счет уменьшения давления в рабочей полости 4. При включении распре-делителя 7 в позицию III за счет допЬлнительного поворота золотника 31 источник 25 через напорную гидролинию 14 с давле нием Р, сообщается с линиями 10 и 13, и порщень 2 перемещается влево на величину, соответствующую деформации жидкости в рабочей полости 3. Одновременно жидкость поступает в камеру 17 дозатора 18, перемещая поршень 19. Деформация пружин 21 тем меньше, чем больше давление Р в управляющей линии 23. , Включени ем распределителя 7 в позицию IV рабочая полость -3 сообщается со, сливной гидролинией 15с давлением , а рабочая полость 4 - с камерой 17 дозатора 18.2 18. Поршень 2 вновь перемещаетсяБлево на величину, соответствующую у величению жидкости в, рабочей ло-. лости 4, .а также подаче из дозатора 18 до его полной разрядки. . .. Изм енением извне давления Pj в управ-з ляющеи линии 23 перемещают точку пози; ионирования поршня 2, соответствующую позиции iV распределителя 7. Соединение рабочей полости 3 через дроссель 24 с управляющей линией 23 увеличивает эффективность воздействия давления Pj на положеП1./ 1 L I Drl/1 А Djl С П П Л JTJ Hid liUJK /ЛСние точки позиционирования .порщня 2 гидроцилиндра 1. При включении распределителя 29 поршень 2 получает ускоренное давление в ту или иную сторону. Малая величина результирующего дискретного перемещения, соответствующая одной позиции распределителя 7, позволяет передвигать поршень 2 с исключительно малой скоростью и достигнуть при этом высокой точности позиционирования. Колебания поршня 2с небольшой амплитудой около точки позиционирования позволяют не связывать момент переключения распределителя 7 с выходом портня 2 в точку позиционирования, при этом уменьшается трение, стабилизируя его всличину. Технико-экономический эффект от использования предложенного привода заключается в расширении фунциональных возможч стей путем как ступенчатого, так и бссступенчатого изменения точки позициопирования поршня гидроцилиндра за счет регулирования по любому закону ланлспяя жидкости в управляющей линии Это |Ч)воляет расширить область применения ипч ДЗ частности применить его в системах с программным управлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод | 1987 |
|
SU1511138A1 |
| Гидравлический дискретный привод | 1978 |
|
SU879063A1 |
| КОВШ СКРЕПЕРА | 1990 |
|
RU2023819C1 |
| ГИДРОСИСТЕМА МОБИЛЬНОЙ МАШИНЫ | 2004 |
|
RU2276237C2 |
| Система управления гидромеханической трансмиссией | 1988 |
|
SU1549806A1 |
| Гидропривод | 1990 |
|
SU1809180A1 |
| Система управления гидромеханической трансмиссией | 1988 |
|
SU1562166A1 |
| Гидравлический дискретный привод | 1983 |
|
SU1229460A1 |
| ГИДРОПРИВОД ЭКСКАВАТОРА | 1991 |
|
RU2013222C1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1661479A1 |
1. ГИДРАВЛИЧЕСКИЙ ДИСКРЕТНЫЙ ПРИВОД, содержащий напорную и сливную гидролинии, гидроцилиндр и установленный в нем с образованием рабочих полостей поршень со штоками разных диаметров, реверсивный распределитель и четырехлинейный четырехпозиционный распределитель с двумя запертыми линиями в каждой позиции, сообщенный с напорной и сливной гидролиниями и рабочими полостями, отличающийся тем, что. с целью расширения функциональных возможностей, привод снабжен дозатором с управляющим устройством и камерой, сообщенной через дополнительную линию четырехпозиционного распределителя в его третьей и четвертой позиции с рабочими полостями. 2.Привод по п. I, отличающийся тем, что управляюшее устройство дозатора выполнено в виде последовательно установленных в управляющей камере тарельчатых пружин с регулируемой степенью сжатия, а управляющая камера сообщена с дополнительной управляющей линией. 3.Привод по п. 2, отличающийся тем, что управляющая линия дополнительно сообщена с рабочей полостью, с проходящим через нее щтоком меньшего диаметра через дроссель.
5
/2
U« ПГ
Ф|/г. 52
55
W
/aJ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидравлический дискретный привод | 1978 |
|
SU879063A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ дискретного регулирования скорости перемещения поршня | 1974 |
|
SU547557A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
