4 СЛ ЭО
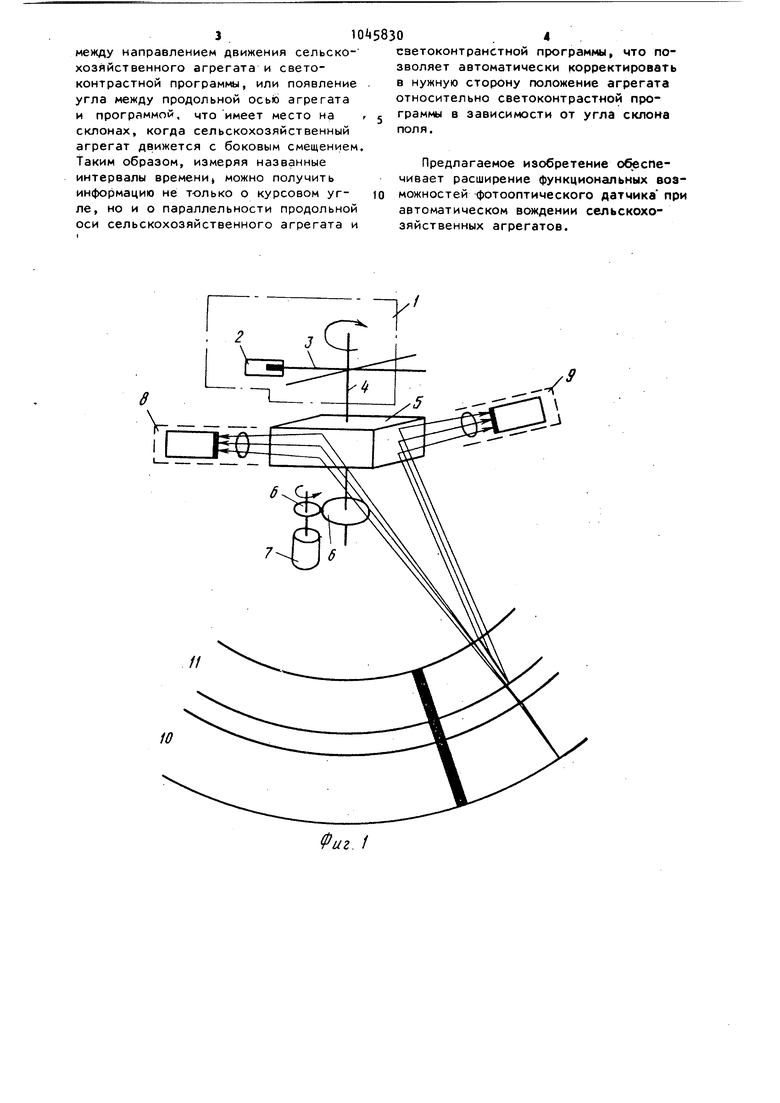
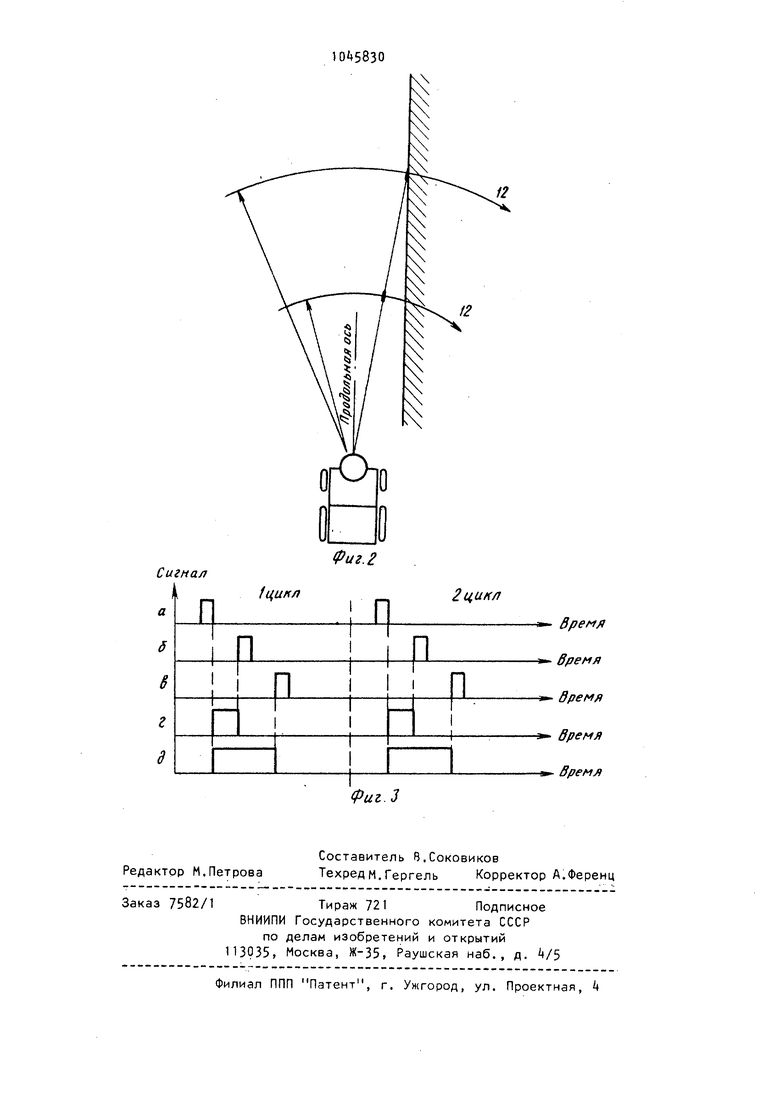
jO Изобретение относится к сельскому хозяйству, в частности к автоматическому вождению агрегатов. Известен фотооптический датчик, выдающий по времени маркерные и управляющие электрические сигналы при сканировании анализируемой поверхнос ти оптическим сканирующим устройством 1 J , Недостатком такого датчика является низкая чувствительность фотодиода. Наиболее близким по тexн B-lecкoй сущности к предлагаемому является датчик5 включающий маркерное устройство, имеющее генератор электрически импульсов и механический маркер, установленный на валу, сканирующий узел, выполненный в виде п-гранной зеркальной призмы, связанной с помощью шестерен с электродвигателем, и приемкое устройство, обращенное к одной из граней зеркальной npi43мы 2 . Недостатком данного датчика являются ограниченные функциональные возможности. Цель изобретения - расширение фун циональных возможностей датчика путе обеспечения автоматического вождения сельскохозяйственных агрегатов на склонах. Поставленная цель достигается тем что датчик снабжен дополнительным приемнь1м устройством, установленным в плоскости, перпендикулярной валу, под углом к продольной оси основного приемного устройства, которое обраи4ено к другой грани п-гранной зеркал НОИ призмы. На фиг.1 представлена функциональ ная схема фотооптического датчика дл автоматического вождения сельскохозяйственных агрегатов; на фиг.2 направление сканирования; на фиг.З временные диаграммы. Датчик включает маркерное устройство 1 , имеющее генератор 2 электрических импульсов и механический маркер 3, установленный на валу , сканирующий узел, выполненный в виде п-гранной зеркальной призмы 5, связанной с помощью шестерен 6 с электродвигателем 7, и приемное устройство 8, обращенное к одной из граней зеркальной призмы S, э также дополнительное приемное устройство 9, установленное в плоскости, перпендикулярной валу , под углом к продольной оси основного приемного устройства 8, которое обращено к другой грани п гранной зеркальной призмы 5Датчик работает следующим образом. Электродзигателем 7 приводится во вращение зеркальная призма 5 и механический маркер 3. Первое приемное устройство 8 при этом воспринимает световой поток, отраженный от поверхности 10, а второе - от поверхности 11. ;В те моменты, когда на приемные устройства попадает световой поток от светоконтрастного образования, ими формируются соответствующие управляющие электрические импульсы, которые могут быть сопоставлены во времени с ма|5керными сигналами от генератора 2 электрических импульсов маркерного устройства 1. Эти маркерные сигналы являются точкой отсчета времени до поступления управляющих сигналов от приемных устройств. Из фиг.2 видно, что при направле НИИ сканирования 12 слева направо управляющий сигнал от светоконтрастной программы появится сначала на выходе основного приемного устройства 8, т.е. у того, у которого радиус обзора больше, и лишь затем на выходе дополнительного приемного устройства. Это иллюстрируется временными диаграммами на фиг.З, где а маркерные сигналы; б - управляющие сигналы от основного приемного устройства; в - управляющие сигналы от дополнительного приемного устройства; г - первь1й эталоннь1й интервал времени между поступлением маркерного сигнала и улравляющето от дополнительного приемного устройства; д - второй эталонный интервал времени между поступлением маркерного сигнала и управляющего сигнала от основного приемного устройства. При правильном положении сельскохозяйственного агрегата относительно программы (как показано на фиг.2 интервалы времени между поступлением маркерного и управлящего сигналов от основного приемного устройства и маркерного и управляющего сигналов от ополнительного приемного устройства равны HeKOTopbiM наперед заданным усовным эталонам, Если оба этих интервала или один из них не равны эталоам, то имеет место рассогласование
между направлением движения сельскохозяйственного агрегата и светоконтрастной программы, или появление угла между продольной осью агрегата и программой, что имеет место на склонах, когда сельскохозяйственный агрегат движется с боковым смещением. Таким образом, измеряя названные интервалы времени можно получить информацию не только о курсовом угле, но и о параллельности продольной оси сельскохозяйственного агрегата и
светоконтранстнои программы, что позволяет автоматически корректировать в нужную сторону положение агрегата относительно светоконтрастмой программы в зависимости от угла склона поля.
Предлагаемое изобретение обеспечивает расширение функциональных возможностей фотооптического датчика при автоматическом всшдении сельскохозяйственных агрегатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения колесного трактора на безотвальной пахоте | 1981 |
|
SU1066473A1 |
| Устройство для автоматического вождения мобильного агрегата | 1985 |
|
SU1336965A1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1974 |
|
SU683662A1 |
| Фотооптический датчик для автоматического направления движения мобильных машин | 1988 |
|
SU1598896A1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1987 |
|
SU1419545A2 |
| Фотооптический датчик для автоматического вождения трактора | 1973 |
|
SU470263A1 |
| Фотооптический датчик для автоматического вождения трактора | 1974 |
|
SU634702A1 |
| Оптико-электронный датчик для систем автоматического вождения мобильных агрегатов | 1985 |
|
SU1315915A1 |
| Устройство для автоматического вождения трактора по светоконтрастной программе | 1979 |
|
SU872325A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
Фиг. /
Фиг. 2
Сигнал
12
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения предела текучести арматурного железа | 1944 |
|
SU70263A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
