вого канала 13 формирования управляющего сигнала. Это позволяет логически обрабатывать сигналы рассогласования обоих каналов формирования управляющих сигналов в электронном блоке 4 управления и избегать ложных срабатываний исполнительного механизма сис- темы автовождения при пересечении све- токонтрастной помехи последовательно каждым из сканируемых лучей фотоопти1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического вождения мобильного агрегата по све- токонтрастной программе, используемого в сельском хозяйстве.
Целью изобретения является повьше- ние качества выполнения технологического процесса системой автовождения путем устранения реакции устройства автовождения на светоконтрастные помехи на самой базовой траектории или в ее непосредственной близости.
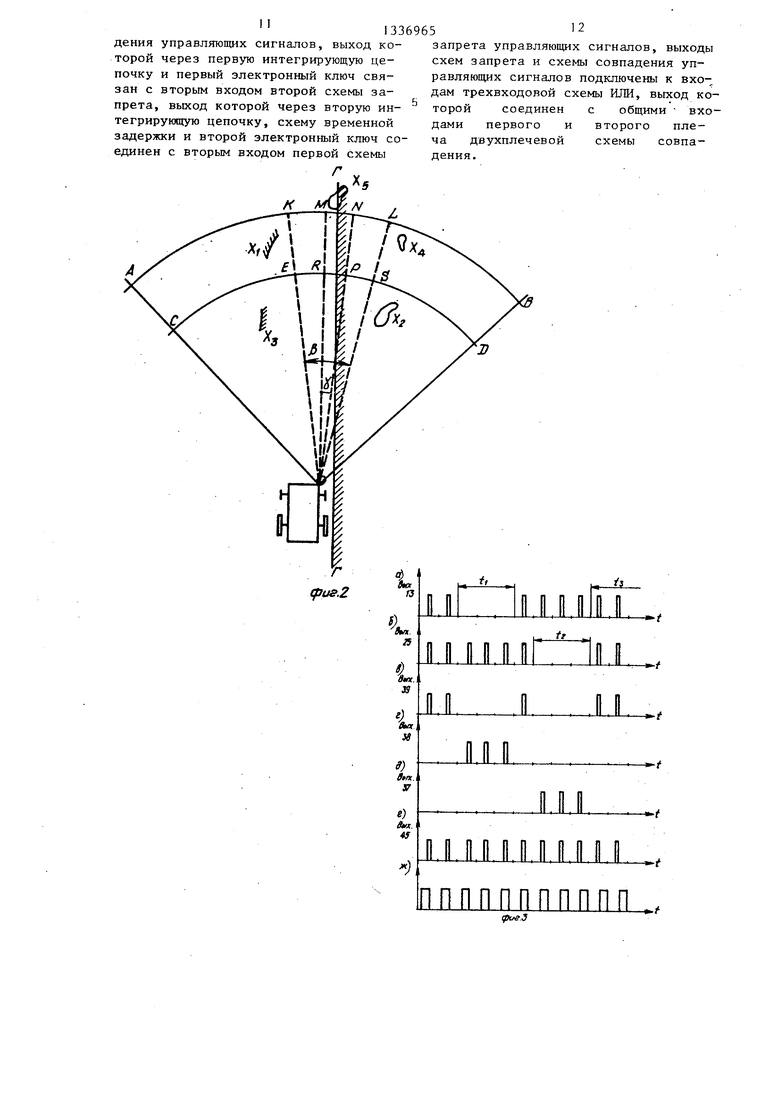
На фиг, I приведена структурная схема устройства; на фиг. 2 - расположение естественных помех относительно агрегата и сканируемых участков; на фиг. 3 - временные диаграммы работы устройства при движении по светоконтрастной программе, на фиг.4 временные диаграммы при отклонении от светоконтрастной программы.
Устройство для автоматического i вождения мобильного агрегата содержит источник 1 электропитания, подключенный к фотооптическому датчику 2, исполнительному механизму 3 и электронному блоку 4 управления. Фотооптический датчик 2, содержащий сканирующий узел 5, связанный с двумя преобразователями 6 и 7 фотоимпульсов в электрические сигналы, и генератор 8 маркерных импульсов, первый и второй выходы которого подключены соответственно к раздельным входам первого плеча 9 и второго плеча IО схемы, со впа- дения, соединенной через каналы 11 и 12 с входами исполнительного механизма 3. Выход первого преобразовате336965
ческого датчика 2, а также изменять курс движения агрегата в случае наличия сигналов рассогласования в обоих каналах формирования управляющих сигналов. Изменением времени задержки логической обработкой сигналов двух каналов формирования управляющих сигналов возможно регулировать размеры светоконтрастных помех, на которые система автовождения не реагирует.4 и
0
5
0
5
0
5
ЛЯ 6 фотоимпульсов в электрические сигналы соединен с первым каналом 13 формирования управляющего сигнала и подключен непосредственно к усилителю-формирователю 14. С первым выходом генератора 8 маркерных импульсов соединены входы первого 15 и второго 16 формирователей временных интервалов, выходы кото рых связаны соответственно с первым входом первой схемы 17 селекции и с первым входом схемы 18 запрета, выход которой соединен с первым входом второй схемы 19 селекции. Вторые входы схем 17 и 19 селекции подключены к выходу усилителя-формирователя 14, а их выходы через первьш 20 и второй 21 фор-: мирователи импульсов - подсоединены к входам схемы ИЛИ 22, первый из входов которой связан, кроме того, через интегрирующую цепочку 23 и электронный ключ 24 с вторым входом схемы 18 запрета. Выход второго преобразователя 7 фотоимпульсов в электрические сигналы соединен с вторым каналом 25 формирования управляющего сигнала, который полностью аналогичен первому каналу 13, и подключен непосредственно к усилителю-формирователю 26, С первым выходом генератора 8 маркерных импульсов соединены входы третьего 27 и четвертого 28 формирователей временных интервалов, выходы которых связаны соответственно с первым входом третьей схемы 29 селекции и с первым входом схемы 30 запрета, выход которой соединен с первым входом схемы 30 запрета, выход которой со- единен с первым входом четвертой схемы 31 селекции. Вторые входы 29 и 31 селекции подключены к выходу усилителя-формирователя 26, а их выходы через третий 32 и четвертый 33 формирователю импульсов и подсоединены к входам схемы ИЛИ 34, первый из входов которой связан, кроме того, через интегрирующую цепочку 35 и электронный ключ 36 с вторым входом схемы 30 запрета. Выходы .первого 13 и второго 25 каналов одновременно соединены с первьми входами соответствующих схем 37 и 38 запрета управляющих сигналов и с входами схемы 39 совпадения управляющих сигналов, выход которой через первую интегрирующую цепочку 40 управляющих сигналов и первый электронный ключ 41 связан с вторым входом схемы 38 запрета, выход которой через вторую интегрирующую цепочку 42 управляющих сигналов, схему 43 временной задержки и второй электронный ключ 44 соединен с вторым входом схемы 37 запрета управляющих сигналов, выходы схем 37 и 38 запрета и схемы 39 совпадения управляющих сигналов подключены к входам трехвходо- вой схемы ИЛИ 45, выход которой соединен с общими входами первого 9 и второго 10 плеча двухплечевой схемы совпадения.
Устройство работает следующим образом.
В исходном состоянии (до начала движения) мобильный агрегат устанавливается относительно светоконтраст- ной программы, как показано на фиг.2. По дугам АВ и СД происходит двух5
10
С выходов преобразователей 6 и 7 фотоимпульсов электрические сигналы, соответствующие развертке сканируемой поверхности по дугам АВ и СД, поступают на усилители-формирователи 14 и 26 и далее на первые входы соответствующих схем 17 и 19 селекции, а также 29 и 31. На вторые входы схем 17 и 29 селекции от формирователей 15 и 27 временных интервалов поступают прямоугольные импулг сы разрешенной зоны обзора, совпадающие по времени поступления и длительности с участка15 ми MN и RP электрической сканируемой поверхности. Схемы 18 и 29 селекции производят стробирование, т.е. пропускают на входы формирователей 20 и 32 временных интервалов только
20 участки MN и RP, в которых находится сигнал от светоконтрастной границы. С выходов формирователей 20 и 32 сигналы поступают на первые входы схем ИЛИ 22 и 34 и на входы интегрирующих
25 элементов 23 и 35, которые при этом вырабатывают напряжение, достаточное для постоянного включения электронных ключей, 24 и 36, запрещающих прохождение прямоугольных импульсов, совпада30 ющих по времени поступлениями длительности с участками KL и ES электрической развертки сканируемой поверхности с выходов других формирователей 16 и 28 временных интервалов зоны Почерез схемы ИЛИ 18 и 30 на вторые
35
иск
входы схем 19 и 31 селекции. Таким образом, на вторые входы схем ИЛИ 22 и 34 импульсы из участков KL и ES не проходят. С выходов схем ИПИ 22 и 34 строчная электрическая развертка ска- каналов 13 и 25 формирования нируемой поверхности. Для повышения управляющих сигналов импульсы поступапомехоустойчивости устройства от далеко отстоящих от базовой линии све- токонтрастных помех из электрической развертки, сканируемой поверхности, вырезаются участки AM, NB, CR, РД и в связи с этим воспринимаются и обрабатываются лишь те сигналы, которые поступают внутри дуг MW и RP разрешенной зоны обзора по углу -у.
При работе в режиме Поиск воспринимаемая зона расширяется по дугам Kh и ES по углу до возвращения мобильного агрегата в требуемое положение относительно светоконтрастной программы. На фиг. 2 х - х. - естественные светоконтрастные образования (помехи), Г - светоконтрастная граница .
ют на схему 39 совпадения и через схему ИЛИ 45 подаются на плечи 9 и 10 схемы совпадения.
45 .
Длительность паузы между первым и
вторым маркерными импульсами равна длительности управляющего импульса. Если управляющий импульс поступает на плечи 9 и 10 схемы совпадения во время паузы между первым и вторым маркерными импульсами, то это значит, что рассогласование равно нул о (т.е. мобильный агрегат не смещен ни в одну
50
55
из сторон) и на выходах плеч 9 и 10 схемы совпадения сигналы отсутствуют. Если же управляющий импульс совпадает по времени поступления па входы плеч 9 и 10 с первым либо с вторым
.
5
10
36965 .
С выходов преобразователей 6 и 7 фотоимпульсов электрические сигналы, соответствующие развертке сканируемой поверхности по дугам АВ и СД, поступают на усилители-формирователи 14 и 26 и далее на первые входы соответствующих схем 17 и 19 селекции, а также 29 и 31. На вторые входы схем 17 и 29 селекции от формирователей 15 и 27 временных интервалов поступают прямоугольные импулг сы разрешенной зоны обзора, совпадающие по времени поступления и длительности с участка15 ми MN и RP электрической сканируемой поверхности. Схемы 18 и 29 селекции производят стробирование, т.е. пропускают на входы формирователей 20 и 32 временных интервалов только
20 участки MN и RP, в которых находится сигнал от светоконтрастной границы. С выходов формирователей 20 и 32 сигналы поступают на первые входы схем ИЛИ 22 и 34 и на входы интегрирующих
25 элементов 23 и 35, которые при этом вырабатывают напряжение, достаточное для постоянного включения электронных ключей, 24 и 36, запрещающих прохождение прямоугольных импульсов, совпада30 ющих по времени поступлениями длительности с участками KL и ES электрической развертки сканируемой поверхности с выходов других формирователей 16 и 28 временных интервалов зоны Почерез схемы ИЛИ 18 и 30 на вторые
35
иск
ют на схему 39 совпадения и через схему ИЛИ 45 подаются на плечи 9 и 10 схемы совпадения.
45 .
Длительность паузы между первым и
вторым маркерными импульсами равна длительности управляющего импульса. Если управляющий импульс поступает на плечи 9 и 10 схемы совпадения во время паузы между первым и вторым маркерными импульсами, то это значит, что рассогласование равно нул о (т.е. мобильный агрегат не смещен ни в одну
50
55
из сторон) и на выходах плеч 9 и 10 схемы совпадения сигналы отсутствуют. Если же управляющий импульс совпадает по времени поступления па входы плеч 9 и 10 с первым либо с вторым
маркерным импульсом, то это свидетелствует о наличии рассогласования, и на соответствующем плече 9 или 10 схемы совпадения появляются электрические импульсы - команды на поворот которые через канал 11 или 12 поступают на исполнительный механизм 3, корректирую1ций курс движения агрегата.
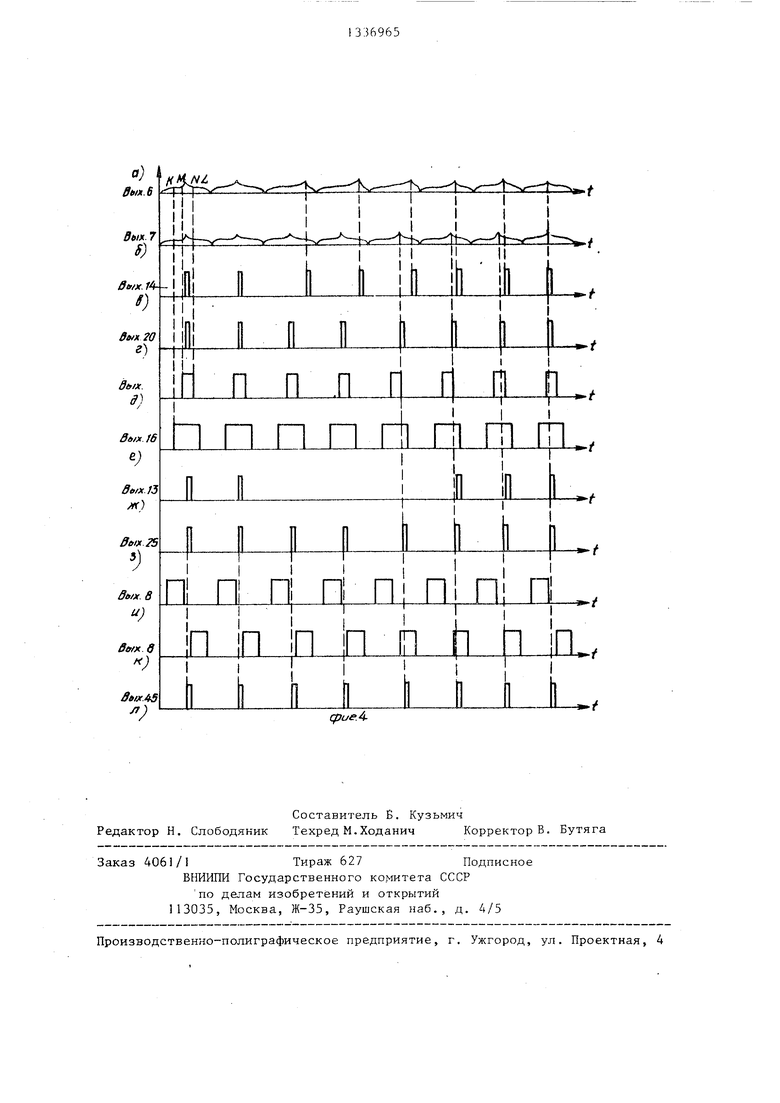
На фиг, 4 представлены временные диаграммы работы устройства при отклонении мобильного агрегата от све- токонтрастной программы, где а) - диаграмма напряжений на выходе первого преобразователя 6 фотоимпульсов в электрические сигналы, б) - диа- . грамма напряжений на выходе второго преобразователя 7 сканирующего обрабатываемый участок по дуге СД (фиг.2
В приведенных диаграммах первые два периода сканирования соответствуют движению агрегата без отклонений от светоконтрастной программы, последующие два периода соответствуют появлению рассогласования во времени формирования светоконтрастного перепада по дуге АВ (фиг, 2) относительно опорного времени, при отсутствии этого рассогласования при сканировании по дуге СД (фиг. 2), при этом на выходе только первого преобразователя 6 фотоимпульсов электрический сигнал смещается.
Последующие три периода свидетельствуют о наличии рассогласования во времени появления светоконтрастного перепада в обоих преобразователях 6 и 7 фотоимпульсов и постепенном устранении этого рассогласования за счет поворота агрегата в сторону устранения возникшего рассогласования, Последний период соответствует возвращению агрегата на светоконтрастную программу
При появлении рассогласования (третий период фиг, 4) импульс на выходе первого усилителя-формирователя 14 смещается во времени (диаграмма 6, фиг. 4) и в соответствии с наличием разрешений на выходах формирователей 15 и 16 временных интервалов (диаграммы д, е, фиг. 4) переводит первый информа1щонный канал 13 в режим Поиск, при этом на выходе информацион- ного канала 13 (диаграмма ж, фиг. 4) импульсы могут совсем пропасть (от третьего до пятого периода .диаграммы фиг. 4) либо при прохождении в режиме
5
0
g
Поиск появляются смещения во времени (шестой и сед1.мой периоды) относительно времени между первым и вторым маркерными импульсами.
Одновременно с этим на выходе второго информационного канала 25 (диаграмма 3, фиг. 4) импульсы первые четыре периода сканирования не смещаются. Появление рассогласования во времени образования импульсов с выхода первого канала 13 приводит к отсутствию импульсов на выходе схемы 39 совпадения и прохождению импульсов с второго канала 25 через схему 38 запрета и схему ИЛИ 45, образуя управляющий импульс (диаграмма л, фиг. 4) на входах плеч 9 и 10 схем совпадения. В дальнейшем при смещении импульса,
0 сформированного вторым каналом 25 (периоды от пятого до седьмого) он совпадает во времени формирования с одним из маркерных импульсов на выходах интегратора 8 (диаграммы м, к,
5 фиг. 4).
При этом на выходе одного из плеч 9 и 10 схемы совпадения появляется электрический импульс - команда на поворот агрегата.
В приведенной диаграмме на фиг. 4 первые четыре периода сканирования импульсы на выходе схемы ИЛИ 45 поступают точно в интервале времени между первым и вторым маркерным импульсами, затем последующие три периода импульсы на. выходе схемы ИЛИ 45 совпадают полностью или частично с вторым маркерным импульсом и последний на диаграмме период импульса вновь поступает в интервале времени между маркерными импульсами. Порядок отработки исполнительными механизмами отклонений от заданного направления движения заключается в том, что при появлении импульсов-команд на поворот агрегата в соответствии с описанным выше порядком импульсы с выходов плеч 9 или 10 схемы совпадения воздействуют через канальные формировате0 ли 11 либо 12 на исполнительный механизм 3, в качестве которого, в частности, может использоваться электрогидравлический исполнительный механизм, в результате чего срабатывает один из электромагнитов, осуществляя воздействие на рулевое управление, в результате чего происходит поворот агрегата в направлении устранения возникшего рассогласования.
5
0
5
в случае воздействия на агрегат какого-либо апучайного фактора (напрн мер, наезд на какую-либо неровность) может произойти быстрое смещение положения агрегата относительно свето- контрастной программы таким образом, что светоконтрастная граница выпадает из разрешенных зон обзора MN и RP При этом в электрической развертке не содержится сигнального импульса и с выходов схем 17 и 29 селекции формирователя 20 и 32 временных интер валов на первые входы схем ИЛИ 22 и 34 и входы интегрирующих элементов 23 и 35 перестанут поступать управляющие импульсы, что ведет к выключению электронных ключей 24 и 36 и подаче на вторые входы схем 18 и 30 запрета уровней напряжения, разрешающего прохождение импульсов с выходов формирователей 16 и 28 временных интервалов зоны Поиск через схемы 18 и 30 запрета на вторые входы схем 19 и 31 селекции. Так как в этом случае светоконтрастная граница находится внутри участка KL и Е3,то сигнальные импульсы будут выделены схемами 19 и
31селекции и через формирователи 21 и 33 временных интервалов и схемы ИЛИ 22 и 34 поступят через схему 39 совпадения и схему ИЛИ 45 на общие входы плеч 9 и 10 схемы совпадения, которая через канальные формировате- jm 11 и 12 воздействует на исполнительный механизм. Как только агрегат повернется настолько, что светоконтрастная граница окажется внутри участков KL и ES, на выходе схем 17 и 29 селекции появятся сигнальные импульсы, которые через формирователи 20 и
32поступают на входы схем ИЛИ 22 и 34, а также на интегрирующие элементы 23 и 35, которые включают электронные ключи 24 и 36, подавая напряжение на входы схем 18 и 30 запрета, и тем самым запрещается прохождение импульсов с выходов формирователей 16 и 28 временных интервалов зоны Поиск.
Таким образом, участок сканируемой поверхности сужается с зоны Поиск KL и ES до разрешенной зоны обзора МК и RP,
При появлении помехи х (фиг. 2) на самой светоконтрастной границе и перемещении агрегата до пересечения контрастной помехи сканирующей разверткой По дуге АВ управляющий им6965
пульс с выхода первого канала 13 формирования смещается во времени, либо вообще исчезает (t на фиг. 3), а временное положение управляющего импульса с выхода второго канала 25 формирования остается неизменным (фиг. Зб). Это приводит к отсутствию управляющих импульсов на выходе схе10 мы 39 совпадения (фиг. Зв), в результате чего интегрирующая цепочка 40 уменьшает выходное напряжение до отключения электронного ключа 41, разрешающего в этом состоянии прохожде15 ние управляющих импульсов с выхода второго канала 25 формирования через схему 38 запрета (фиг. Зг) и трех- входовую схему ИЛИ 45 (фиг. 3с) на общие входы первого 9 и второго 10
20 плеча схемы совпадения в период времени между первым и вторым маркерными импульсами (фиг. Зж), продолжая тем самым движение агрегата без изменения курса. Управляющие импульсы с
25 выхода схемы 38 запрета через интегрирующую цепочку 42 поддерживают на выходе схемы 43 временной задержки напряжение, достаточное для отключения второго электронного ключа 44,
30 запрещающего на заданное время прохождение управляющих импульсов с первого канала 13 формирования через схему 37 запрета. Дальнейшее движение агрегата приводит к тому, что
2 контрастная помеха Xj. (фиг. 2) пересекается сканирующей разверткой не по дуге АВ, а по дуге СД. При этом управляющие импульсы на выходе второго канала 25 формирования (t на
40 фиг. Зб) исчезают. Отсутствие в это время управляющих импульсов со схемы 38 запрета (фиг. Зг) приводит к уменьшению напряжения на выходе интегрирующей цепочки 42. Некоторое
45 время, определяемое схемой 43 временной задержки, напряжение на выходе электронного ключа 44 поддерживает его отключенным, благодаря чему вновь появившиеся управляюш 1е импуль50 сы с выхода первого канала 13 формирования проходят через схему 37 запрета (фиг. Зд) и трехвходовую схему ИЛИ 45 (фиг. Зе) на общие входы плеч 9 и 10 двухплечевой схемы сов55 падения, также сохраняя неизменным курс движения агрегата. Затем вследствие продолжающегося движения агрегата на обоих строках электронной развертки исчезает помеха и на выхо
дах обоих каналов 13 и 25 формиронания управляющих сигналов появляются импульсы (t на фиг. За), которые через схему 39 совпадения поступают на трехвходовую схему ИЛИ 45, при этом через время, определяемое схемой 43 временной задержки, на ее выходе напряжение изменяется, приводя к включению электронного ключа 44, запрещающего прохождение управляющих импульсов с выхода первого канала 13 формирования через схему 37 запрета. Устройство становится подготовленным к преодолению следующей светоконт- растной помехи без изменения курса.
Таким образом, система автовождения не изменяла курс движения мобильного агрегата, несмотря на све- токонтрастную помеху (фиг . 2), расположенную непосредственно на базово линии светоконтрастной программы.
Пространственные размеры помех, на которые система автовождения ложно не срабатывает, могут регулироват ся изменением времени задержки сигналов схемой 43.
Применение предлагаемого изобретения позволяет значительно повысить прямолинейность вождения мобильных агрегатов при автоматическом вождении по светоконтрастной программе путем, реакции системы автовождения на светоконтрастные помехи, расположенные в непосредственной близости, либ на самой базовой линии светоконтрастной программы. Это улучшает качество вьшолняемого мобильным агрегатом технологического процесса.
Форму.ла изобретения
Устройство для автоматического вождения мобильного агрегата, содержащее источник электропитания, исполнительный механизм, фотооптический датчик включающий сканирующий узел, преобразователь фотоимпульсов в электрические сигналы и генератор маркер- ньгх импульсов, и электронный блок управления, включающий двухгшечевую схему совпадения, раздельные входы которой соединены с выходами генератора маркерных импульсов, а выходы через канальные преобразователи связаны с исполнительным механизмом, и первый канал формирования управляющего сигнала, состоящий из усилителя- формирователя, вход которого связан
5
5
0
0
5
0
5
0
5
с выходом преобразователя фотоимпульсов фотооптического датчика, первого и второго формирователей временных интервалов, входы которых подключены к первому маркерному выходу, а выходы - соответственно к первому входу первой схемы селекции и к первому входу схемы запрета, выход которой соединен с первым входом второй схемы селекции, вторые входы первой и второй схем селекции связаны с выходом усилителя формирователя, а их выходы через первый и второй формирователи импульсов подключены к входам схемы ИЛИ, первый из входов которой соединен, кроме того, через интегрирующую цепочку и электронный ключ с вторым входом схемы запрета, о 1: л и ч а ю- щ е е с я тем, что, с целью повышения качества вьтолнения технологического процесса устройством автовождения, в фотооптический датчик введен второй преобразователь фотоимпульсов в электрические сигналы, а электронный блок управления дополнительно снабжен вторым каналом формирования управляющих сигналов, пространственно разнесенным с первой, второй и первой интегрирующей цепочкой управляющих сигналов, первым и вторым электронными ключами, схемой временной задержки и трехвходовой схемой ИЛИ, причем второй канал формирования управляющих сигналов состоит из усилителя-формирователя, вход которого связан с выходом второго преобразователя фотоимпульсов в электрические сигналы, третьего и четвертого формирователей временных интервалов, входы которых подключены к первому маркерному выходу, а выходы - соответственно к первому входу третьей схемы селекции, и к первому входу схемы запрета, выход которой соединен с первым входом четвертой схемы селекции, вторые входь третьей и четвертой схем селекции связаны с выходом усилителя-формирователя, а их выходы через третий и четвертый формирователи импульсов подключены к входам схемы ИЛИ, первьш из входов которой соединен, кроме того, через интегрирующую цепочку и электронный ключ с вторым входом схемы запрета, выходы первого и второго каналов формирования управляющих сигналов соединены с. первыми входами соответствующих схем запрета и с входами схемы совпадения управляющих сигналов, выход которой через первую интегрирующую цепочку и первый электронный ключ связан с вторым входом второй схемы запрета, выход которой через вторую интегрирующую цепочку, схему временной задержки и второй электронный ключ соединен с вторым входом первой схемы
запрета управляющих сигналов, выходы схем запрета и схемы совпадения управляющих сигналов подключены к входам трехвходовой схемы ИЛИ, выход которой соединен с общими входами первого и второго плеча двухплечевой схемы совпадения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1987 |
|
SU1419545A2 |
| Оптико-электронный датчик для систем автоматического вождения мобильных агрегатов | 1985 |
|
SU1315915A1 |
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
| Оптикоэлектронный координатор для автоматического вождения мобильных агрегатов | 1986 |
|
SU1378086A1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1974 |
|
SU683662A1 |
| Устройство для автоматического вождения колесного трактора на безотвальной пахоте | 1981 |
|
SU1066473A1 |
| Устройство автоматического вождения колесных тракторов | 1986 |
|
SU1440375A1 |
| Устройство для управления движением самоходного агрегата | 1987 |
|
SU1535404A1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1985 |
|
SU1336964A1 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - повышение качества выполнения технологического процесса системой автовождения. В устройстве предусмотрено введение в фотооптический датчик и в электронный блок управления второго канала 25 формирования управляющего сигнала, сканирующей поверхности на определенном расстоянии по ходу движения агрегата от пер(Л со со О5 СО О) сд
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1981 |
|
SU1033031A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
