Изобретение относится к устройствам для автоматического вождения мобильных агрегатов по светоконтрастной программе, в частности для автовождения колесных тракторов на безотвальной пахоте.
Известно устройство для автоматического направления движения самоходных агрегатов, содержащее фотооптический датчик, фильтр-формирователь, формирователь и ждущие мультивибраторы 1.
Данное устройство имеет низкую Еюмехозащищенность и не обеспечивает возможности работы ночью из-за низкой чувствительности фотодиода, используемого в качестве датчика.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является устройство, содержащее фотооптический датчик с маркерным устройством, исполнительный механизм и,электронный блок управления, имеющий усилительформирователь, соединенный с фотооптическим, датчиком и двухканальную логическую схему, связанную двумя входами с маркерным устройством фотооптического датчика, а выходами - через канальные преобразователи со входами исполнительного механизма 2.
Недостатком упомянутого устройства является неустойчивость его работы при вождении агрегатов по безотвальной пахоте, вызванная тем, что за -полезный сигнал принимается наибольший по амплитуде имнульс фотооптического датчика.
Цель изобретения - повыщение помехоустойчивости устройства и улучшение его привязки к границе вспаханной и невспаханной частей поля.
Указанная цель достигается тем, что электронный блок снабжен селектором первого импульса из серии импульсов, при этом вход упомянутого селектора связан с выходом усилителя-формирователя, а выход подключен к третьему входу двухканальной логической схемы.
Селектор первого импульса из серии импульсов содержит последовательно соединенные первую дифференциальную цепь,; одновибратор и вторую дифференциальную цепь.
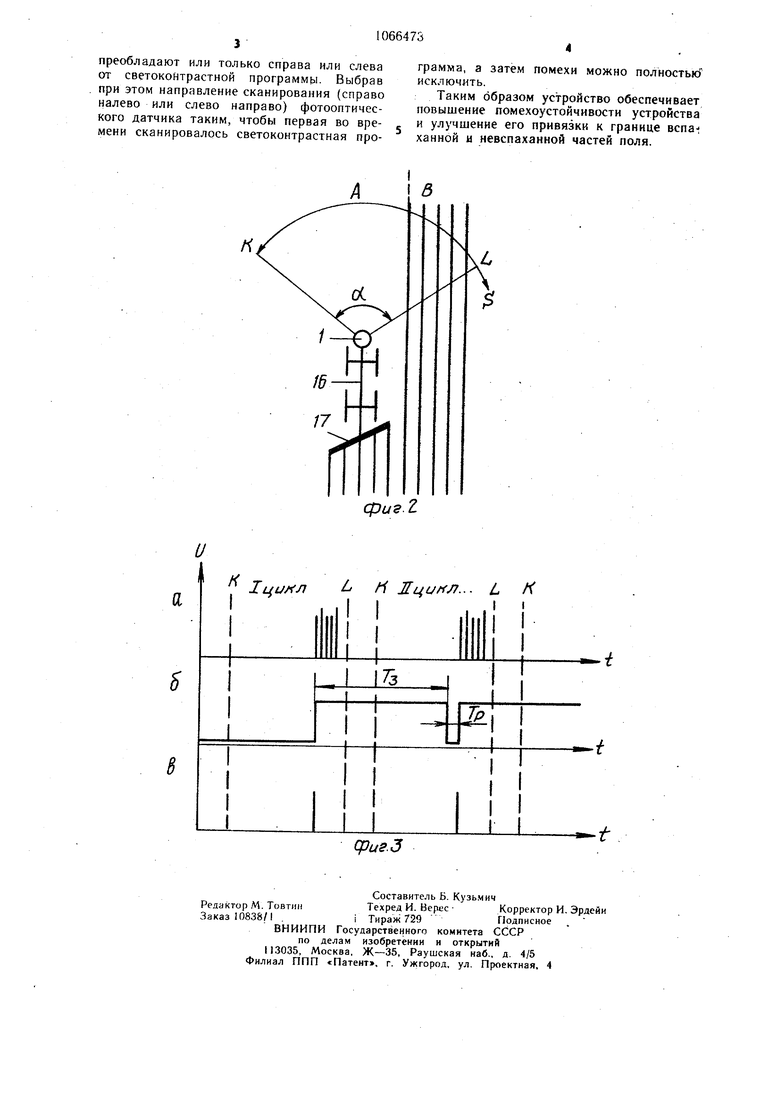
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - технологический процесс пахоты; на фиг. 3 - временные диафрагмы работы устройства.
Устройство содержит фотооптический датчик I, включающий сканирующий узел 2, осветитель 3 (использующийся при работе ночью), маркерное устройство 4, преобразователь 5 фотоимпульсов в сигнальные электрические импульсы, связанный с электронным блоком управления -6, который содержит усилитель - формирователь 7, соединенный входом с выходом преобразователя 5 фотоимпульсов в сигнальные электрические импульсы, а выходом-со входом селектора 8 первого импульса из серии импульсов. К выходу селектора 8 подключен вход 9 двухканальной логической схемы 10, входы t и 12 которой связаны с маркерным устройством 4, а выходы через канальные преобразователи 13 и 14 соединены с исполнительным механизмом 15.
Технологический процесс автовождения колесного трактора -16 с плугом 17 на безотвальной пахоте заключается ;в сканироваНИИ узлом 2 поверхности KL, ограниченной углом обзора о( и захватывающей, как невспаханную А, так и вспаханную В части
:поля. Диаграмма а показывает электрические сигналы от светоконтрастных образова НИИ, поступающие на вход селектора 8. Время разрешения Тр и запрета Тз селектора 8
показаны на диaгpaмJvle б. Диаграмма в показывает сигналы на выходе се;1ектора. Буквами К и L обозначены границы каждого цикла, в течение которого световой поток падает на преобразователь 5 фотоимпульсов, отражаясь от какой-либо одной грани зеркальной призмы, вращающегося сканирующегося узла 2 (фиг. 3).
Устройство работает следующим образом.
На вход преобразователя 5 фотоимпульсов .при вращении зеркальной призмы сканирующего узла 2 поступают сигналы различной силы (отраженные от более темных или более светлых участков поверхности сканирования), которые преобразуются в электрические сигналы соответствующих амплитуд. Эти сигналы усиливаются усилителем-формирователем 7 и поступают на вход селектора 8, который пропускает на вход двухканальной логической схемы 10 лишь первый импульс из серии импульсов, соответствующих ряду светоконтрастных образований от предыдущего прохода безотвального плуга. Пропустив первый импульс, селектор 8 запрещает прохождение остальных и начинает отсчитывать время (примерно 0.8-0,9 Т цикла), Б течение которого на вход селектора 8 посту-пают сигналы от второго светоконтрастногЪ образования (линии), третьего и т.д. Т.е. это в данном случае сигналы помех, которые отбрасываются. По окончании времени отсчета, непосредственно перед ожидаемым поступлением следующего импульса (во втором цикле) от первого сьетоконтрастного образования селектор 8 снова приходит в исходное состояние (готовности), пропускает первый импульс, запрещает прохождение остальных и т.д.
Данное устройство для aBTONiaTH4ecKoro вождения можр быть применено и на других транспортных средствах при вождении их по светоконтрастной програм.ме. Устройство эффективно в то.м случае, ес.ги по.мехи
преобладают или только справа или слева от светоконтрастной программы. Выбрав при этом направление сканирования (справо налево или слево направо) фотооптического датчика таким, чтобы первая во времени сканировалось светоконтрастная программа, а затем помехи можно полностью исключить.
Таким образом устройство обеспечивает повышение помехоустойчивости устройства и улучшение его привязки к границе вспа-; ханной и невспаханной частей поля.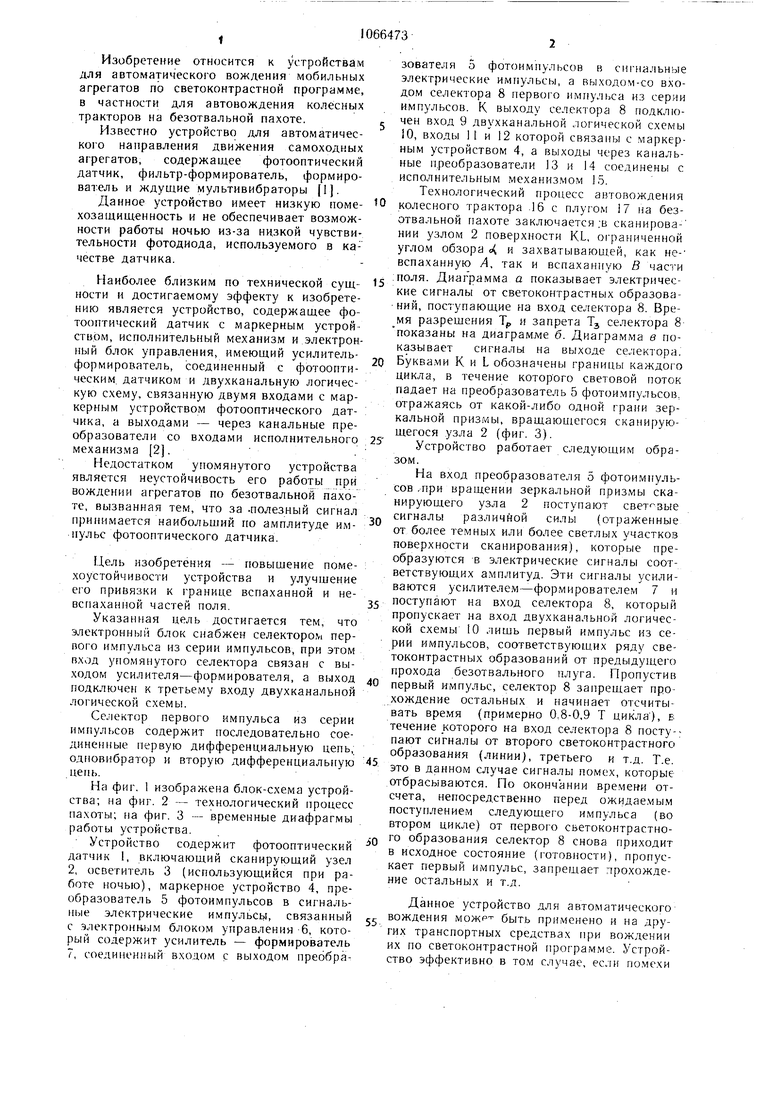
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения мобильного агрегата | 1985 |
|
SU1336965A1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1974 |
|
SU683662A1 |
| Фотооптический датчик для автоматического направления движения мобильных машин | 1988 |
|
SU1598896A1 |
| ФОТООПТИЧЕСКИЙ ДАТЧИК ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1971 |
|
SU307756A1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1987 |
|
SU1419545A2 |
| Фотооптический датчик для автоматического вождения трактора | 1973 |
|
SU470263A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2003 |
|
RU2249841C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1969 |
|
SU232636A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2255853C1 |
1. УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ КОЛЕСНОГО ТРАКТОРА НА БЕЗОТВАЛЬНОЙ ПАХОТЕ, содержащее фотооптический датчик с маркерным устройством, исполнительный механизм и электронный блок управления, имеющий усилитель-формирователь, соединенный с фотооптическим датчиком, и двухканальную логическую схему, связанную двумя входами с маркерным устройством фотооптического датчика, а выходаI ми - через канальные преобразователи со входами исполнительного механизма, отличающееся тем, что, с целью повышения помехоустойчивости устройства и улучщения его привязки к границе вспаханной и невспаханной частей поля, электронный блок снабжен селектором первого импульса из серии импульсов, при этом вход упомянутого селектора связан с выходом усилителя-формирователя, а выход подключен к третьему входу двухканальной логической схемы. 1. Устройство по п. 1, отличающееся тем, что селектор первого импульса из -серии импульсов содержит последовательно i соединенные первую дифференциальную цепь, одновибратор и вторую дифференци(Л альную цепь. О5 О5 4;: оо
3
tX
X
/
cpu.Z
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 0 |
|
SU232636A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1974 |
|
SU683662A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| тин). | |||
