ua.i
10
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для вождения тракторных агрегатов.
Цель изобретения - повышение помехоустойчивости и точности определения направления движения.
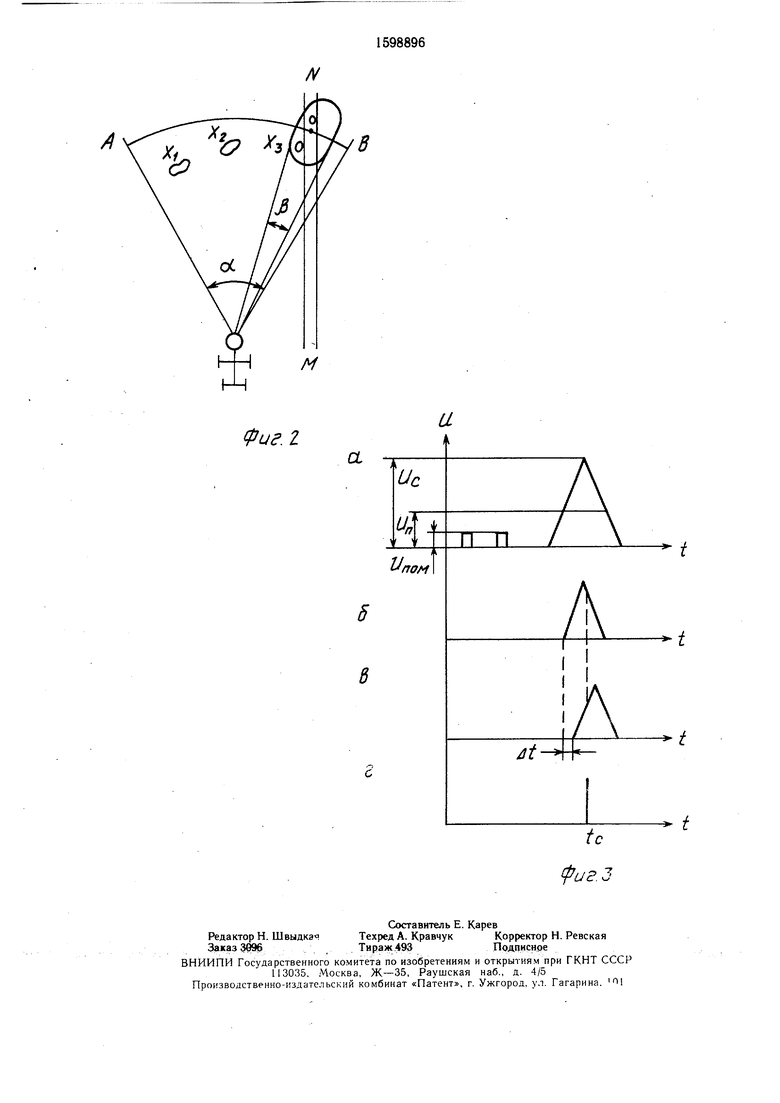
На фиг. 1 показана блок-схема фотооптического датчика; на фиг. 2 - технологический процесс вождения; на фиг. 3 - временные диаграммы работы устройства.
Фотооптический датчик 1, содержащий сканирующий узел 2, маркерное устройство 3, фотоприемник 4, соединен с входом усилителя 5, выход которого соединен с входом .,5 пороговой схемы 6, выход которой соединен с входом 7 блока сравнения 8 и входом линии задержки 9, выход которой соединен с входом 10 блока сравнения.
20
На фотоприемник фотоимпульсов при ска- иировании поверхности посредством сканирующего узла 2 поступают импульсы потока излучения различной амплитуды, отраженные от светоконтрастных образований, причем если они попадают в площадь излучателя S совместно со светокоитрастной полосой, то они суммируются с потоком излучения от светоконтрастной полосы. Эти импульсы усиливаются усилителем 5 и поступают на пороговую схему 6.
Импульс, амплитуда которого больше (/, с выхода пороговой схемы, поступает на вход блока сравнения 8 и линии задержки 9. Импульс, задержанный на время Д с выхода линии задержки 9, поступает на другой вход блока сравнения 8. В момент времени t когда амплитуда импульса на входе 7 становится меньще амплитуды импульса на входе 10, на выходе блока сравнения 8 пойв- ляется сигнал.
Так как превышение импульса на входе 10 над импульсом на входе 9 говорит о начале спада амплитуды, то сигнал на выходе блока сравнения с погрешностью Д/ указывает на момент попадания контрастной поТехнологический процесс вождения мобильной машины на дороге заключается в сканировании узлом 2 поверхности АВ, ограниченной углом обзора а, причем при
тГя;Г„Т5% :ер; :с ь°АГзГв :т ,в - гео„е,р„,еск„й „е„тр „злуча.«я.
часть поверхности дороги с нанесенной на ней светоконтрастной полосой NM и свето- контрастными образованиями, i-Хз.
Диаграмма «а показывает импульсы
т.е. погрешность измерения временного интервала между импульсом маркера и управляющим импульсом определяется величиной задержки АЛ
На фотоприемник фотоимпульсов при ска- иировании поверхности посредством сканирующего узла 2 поступают импульсы потока излучения различной амплитуды, отраженные от светоконтрастных образований, причем если они попадают в площадь излучателя S совместно со светокоитрастной полосой, то они суммируются с потоком излучения от светоконтрастной полосы. Эти импульсы усиливаются усилителем 5 и поступают на пороговую схему 6.
Импульс, амплитуда которого больше (/, с выхода пороговой схемы, поступает на вход блока сравнения 8 и линии задержки 9. Импульс, задержанный на время Д с выхода линии задержки 9, поступает на другой вход блока сравнения 8. В момент времени t когда амплитуда импульса на входе 7 становится меньще амплитуды импульса на входе 10, на выходе блока сравнения 8 пойв- ляется сигнал.
Так как превышение импульса на входе 10 над импульсом на входе 9 говорит о начале спада амплитуды, то сигнал на выходе блока сравнения с погрешностью Д/ указывает на момент попадания контрастной - гео„е,р„,еск„й „е„тр „злуча.«я.
- гео„е,р„,еск„й „е„тр „злуча.«я.
т.е. погрешность измерения временного интервала между импульсом маркера и управляющим импульсом определяется величиной задержки АЛ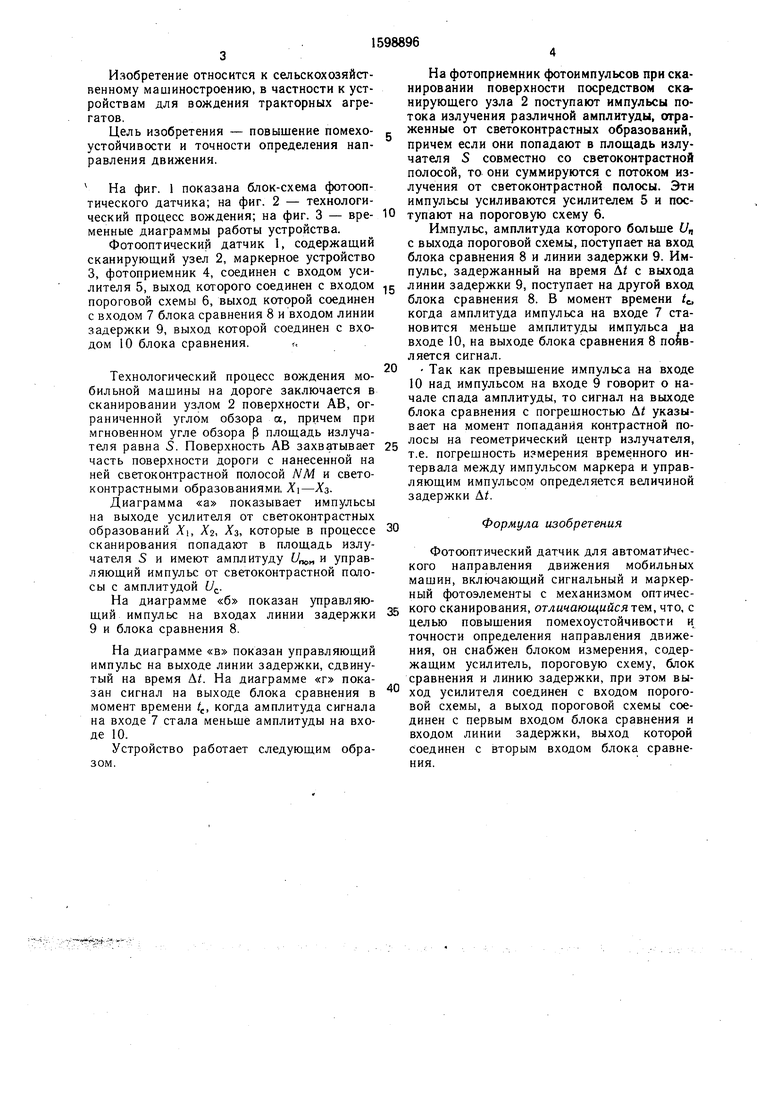
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения мобильного агрегата | 1985 |
|
SU1336965A1 |
| Устройство для автоматического вождения колесного трактора на безотвальной пахоте | 1981 |
|
SU1066473A1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1974 |
|
SU683662A1 |
| Оптико-электронный датчик для систем автоматического вождения мобильных агрегатов | 1985 |
|
SU1315915A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2255853C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2003 |
|
RU2249841C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2263021C1 |
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
| Фотооптический датчик для автоматического вождения сельскохозяйственных агрегатов | 1982 |
|
SU1045830A1 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - повышение помехоустойчивости и точности определения направления движения. Фотооптический датчик 1 содержит сканирующий узел 2, маркерное устройство 3, фотоприемник 4, усилитель 5, пороговую схему 6, блок 8 сравнения и линию 9 задержки. За счет подключения к выходу пороговой схемы 6 линии 9 задержки и сравнения прямого и задержанного сигналов на блоке сравнения достигается искомый эффект. 3 ил.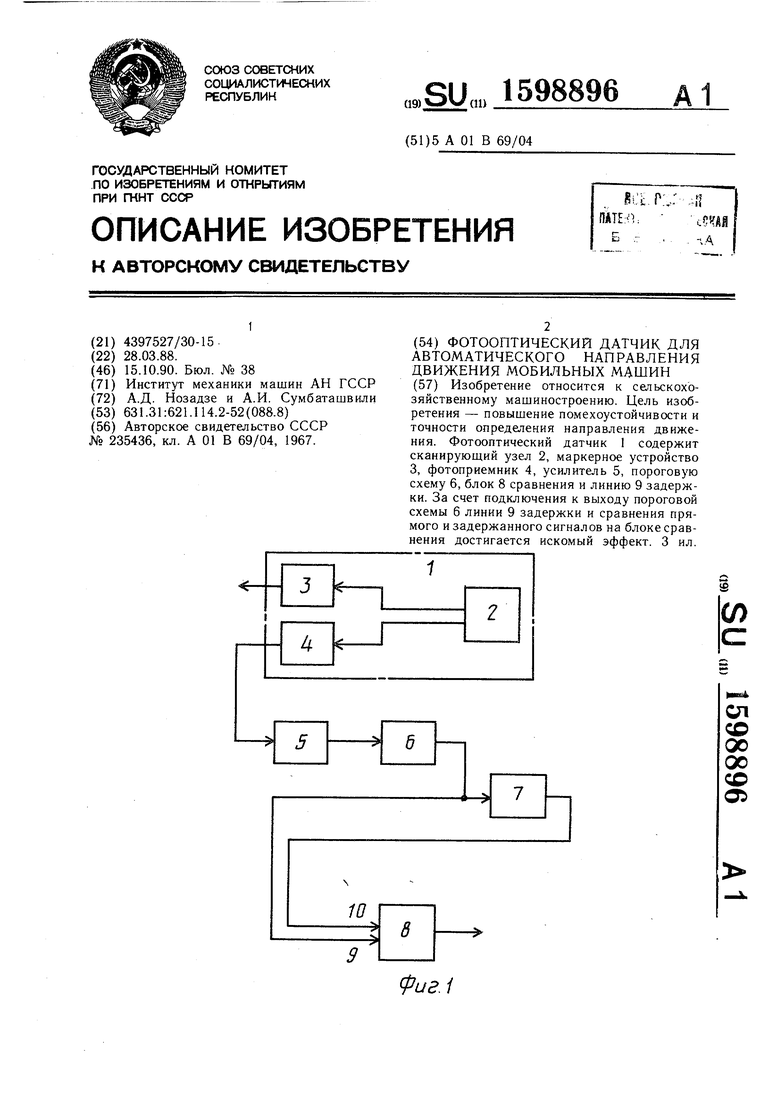
на выходе усилителя от светоконтрастных образований А, Xz, Хз, которые в процессе сканирования попадают в площадь излучателя S и имеют амплитуду и управляющий импульс от светоконтрастной полосы с амплитудой U.
На диаграмме «б показан управляющий импульс на входах линии задержки 9 и блока сравнения 8.
На диаграмме «в показан управляющий импульс на выходе линии задержки, сдвинутый на время At. На диаграмме «г показан сигнал на выходе блока сравнения в момент времени t, когда амплитуда сигнала на входе 7 стала меньше амплитуды на входе 10.
Устройство работает следующим образом.
Формула изобретения
Фотооптический датчик для автомат}1чес- кого направления движения мобильных машин, включающий сигнальный и маркерный фотоэлементы с механизмом оптического сканирования, отличающийся eiA, что, с целью повышения помехоустойчивости и точности определения направления движения, он снабжен блоком измерения, содержащим усилитель, пороговую схему, блок сравнения и линию задержки, при этом выход усилителя соединен с входом пороговой схемы, а выход пороговой схемы соединен с первым входом блока сравнения и входом линии задержки, выход которой соединен с вторым входом блока сравнения.
М
Фиг. г
а
а
J,
Uc
Щ
Л и
i
| ФОТООПТИЧЕСКИЙ ДАТЧИК ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ ЛЮБИЛЬКЫХ МАШИН | 0 |
|
SU235436A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
